 第十七章 SPI——讀寫串行FLASH
第十七章 SPI——讀寫串行FLASH

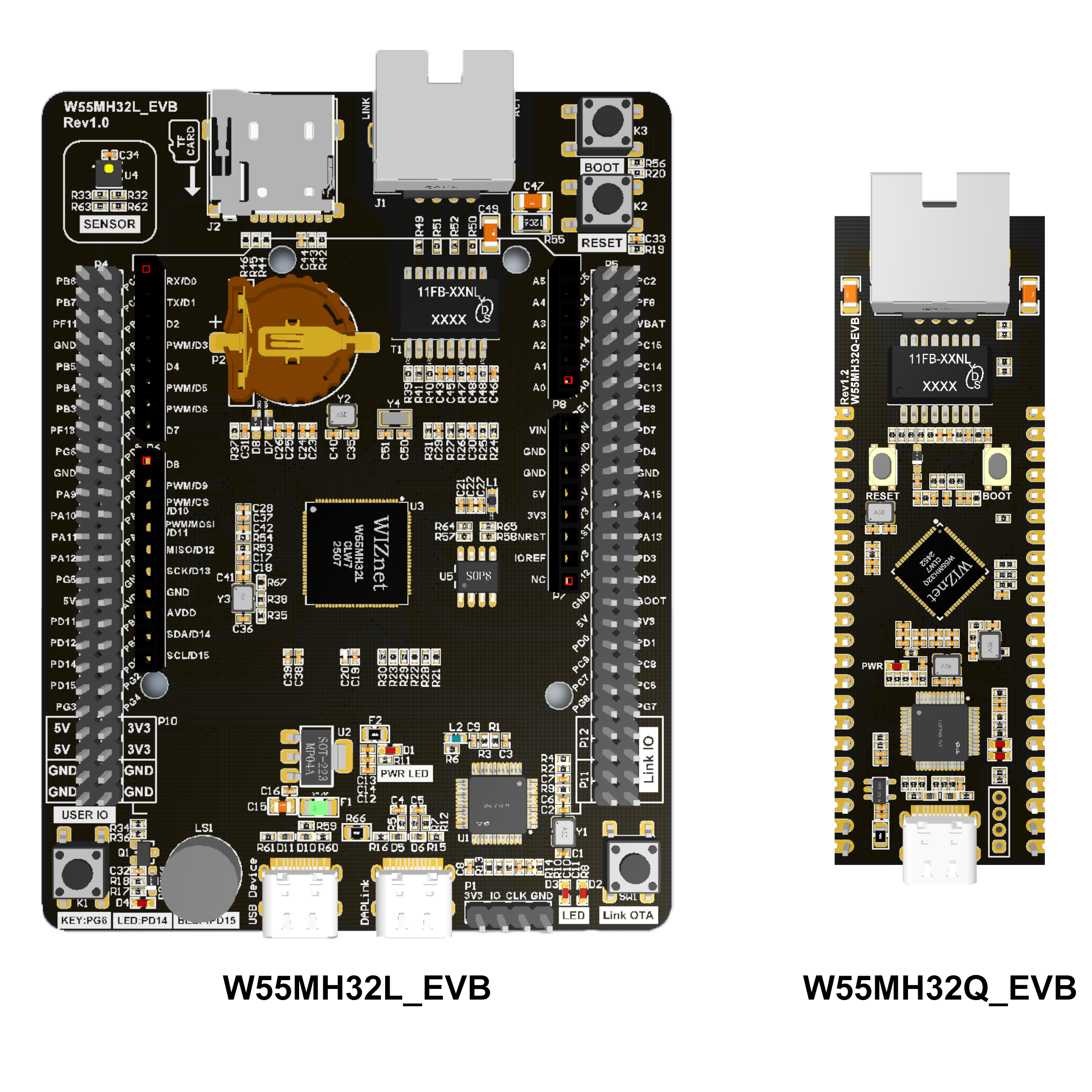
單芯片解決方案,開啟全新體驗——W55MH32 高性能以太網單片機
W55MH32是WIZnet重磅推出的高性能以太網單片機,它為用戶帶來前所未有的集成化體驗。這顆芯片將強大的組件集于一身,具體來說,一顆W55MH32內置高性能Arm? Cortex-M3核心,其主頻最高可達216MHz;配備1024KB FLASH與96KB SRAM,滿足存儲與數據處理需求;集成TOE引擎,包含WIZnet全硬件TCP/IP協議棧、內置MAC以及PHY,擁有獨立的32KB以太網收發緩存,可供8個獨立硬件socket使用。如此配置,真正實現了All-in-One解決方案,為開發者提供極大便利。
在封裝規格上,W55MH32 提供了兩種選擇:QFN100和QFN68。
W55MH32L采用QFN100封裝版本,尺寸為12x12mm,其資源豐富,專為各種復雜工控場景設計。它擁有66個GPIO、3個ADC、12通道DMA、17個定時器、2個I2C、5個串口、2個SPI接口(其中1個帶I2S接口復用)、1個CAN、1個USB2.0以及1個SDIO接口。如此豐富的外設資源,能夠輕松應對工業控制中多樣化的連接需求,無論是與各類傳感器、執行器的通信,還是對復雜工業協議的支持,都能游刃有余,成為復雜工控領域的理想選擇。 同系列還有QFN68封裝的W55MH32Q版本,該版本體積更小,僅為8x8mm,成本低,適合集成度高的網關模組等場景,軟件使用方法一致。更多信息和資料請進入網站或者私信獲取。
此外,本W55MH32支持硬件加密算法單元,WIZnet還推出TOE+SSL應用,涵蓋TCP SSL、HTTP SSL以及 MQTT SSL等,為網絡通信安全再添保障。
為助力開發者快速上手與深入開發,基于W55MH32L這顆芯片,WIZnet精心打造了配套開發板。開發板集成WIZ-Link芯片,借助一根USB C口數據線,就能輕松實現調試、下載以及串口打印日志等功能。開發板將所有外設全部引出,拓展功能也大幅提升,便于開發者全面評估芯片性能。
若您想獲取芯片和開發板的更多詳細信息,包括產品特性、技術參數以及價格等,歡迎訪問官方網頁,我們期待與您共同探索W55MH32的無限可能。
第十七章 SPI——讀寫串行FLASH
本章參考資料:《W55MH32中文參考手冊》SPI章節及《SPI總線協議介紹》。
1 SPI協議簡介
SPI協議是由摩托羅拉公司提出的通訊協議(Serial Peripheral Interface),即串行外圍設備接口, 是一種高速全雙工的通信總線。它被廣泛地使用在ADC、LCD等設備與MCU間,要求通訊速率較高的場合。
下面我們分別對SPI協議的物理層及協議層進行講解。
1.1 SPI物理層
SPI通訊設備之間的常用連接方式見下圖,常見的SPI通訊系統 :
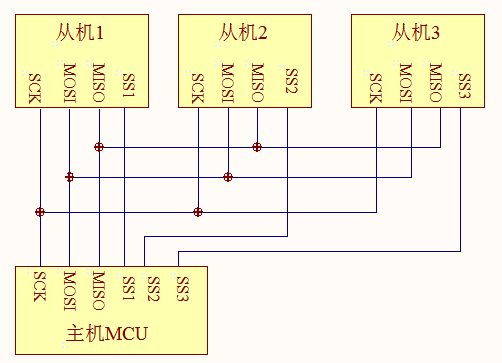
SPI通訊使用3條總線及片選線,3條總線分別為SCK、MOSI、MISO,片選線為SS,它們的作用介紹如下:
SS ( Slave Select):從設備選擇信號線,常稱為片選信號線,也稱為NSS、CS,以下用NSS表示。當有多個SPI從設備與SPI主機相連時, 設備的其它信號線SCK、MOSI及MISO同時并聯到相同的SPI總線上,即無論有多少個從設備,都共同只使用這3條總線; 而每個從設備都有獨立的這一條NSS信號線,本信號線獨占主機的一個引腳,即有多少個從設備,就有多少條片選信號線。 I2C協議中通過設備地址來尋址、選中總線上的某個設備并與其進行通訊;而SPI協議中沒有設備地址,它使用NSS信號線來尋址, 當主機要選擇從設備時,把該從設備的NSS信號線設置為低電平,該從設備即被選中,即片選有效, 接著主機開始與被選中的從設備進行SPI通訊。所以SPI通訊以NSS線置低電平為開始信號,以NSS線被拉高作為結束信號。
SCK (Serial Clock):時鐘信號線,用于通訊數據同步。它由通訊主機產生,決定了通訊的速率,不同的設備支持的最高時鐘頻率不一樣, 如W55MH32的SPI時鐘頻率最大為fpclk/2,兩個設備之間通訊時,通訊速率受限于低速設備。
MOSI (Master Output, Slave Input):主設備輸出/從設備輸入引腳。主機的數據從這條信號線輸出, 從機由這條信號線讀入主機發送的數據,即這條線上數據的方向為主機到從機。
MISO (Master Input,,Slave Output):主設備輸入/從設備輸出引腳。主機從這條信號線讀入數據, 從機的數據由這條信號線輸出到主機,即在這條線上數據的方向為從機到主機。
1.2 協議層
SPI協議定義了通訊的起始和停止信號、數據有效性、時鐘同步等環節。
1.2.1 SPI基本通訊過程
先看看SPI通訊的通訊時序,見下圖,SPI通訊時序 :
這是一個主機的通訊時序。NSS、SCK、MOSI信號都由主機控制產生,而MISO的信號由從機產生,主機通過該信號線讀取從機的數據。 MOSI與MISO的信號只在NSS為低電平的時候才有效,在SCK的每個時鐘周期MOSI和MISO傳輸一位數據。
以上通訊流程中包含的各個信號分解如下:
1.2.2 通訊的起始和停止信號
在圖 SPI通訊時序 中的標號處,NSS信號線由高變低,是SPI通訊的起始信號。NSS是每個從機各自獨占的信號線, 當從機在自己的NSS線檢測到起始信號后,就知道自己被主機選中了,開始準備與主機通訊。在圖中的標號處,NSS信號由低變高, 是SPI通訊的停止信號,表示本次通訊結束,從機的選中狀態被取消。
1.2.3 數據有效性
SPI使用MOSI及MISO信號線來傳輸數據,使用SCK信號線進行數據同步。MOSI及MISO數據線在SCK的每個時鐘周期傳輸一位數據, 且數據輸入輸出是同時進行的。數據傳輸時,MSB先行或LSB先行并沒有作硬性規定,但要保證兩個SPI通訊設備之間使用同樣的協定, 一般都會采用圖 SPI通訊時序 中的MSB先行模式。
觀察圖中的標號處,MOSI及MISO的數據在SCK的上升沿期間變化輸出,在SCK的下降沿時被采樣。即在SCK的下降沿時刻, MOSI及MISO的數據有效,高電平時表示數據“1”,為低電平時表示數據“0”。在其它時刻,數據無效,MOSI及MISO為下一次表示數據做準備。
SPI每次數據傳輸可以8位或16位為單位,每次傳輸的單位數不受限制。
1.2.4 CPOL/CPHA及通訊模式
上面講述的圖 SPI通訊時序 中的時序只是SPI中的其中一種通訊模式,SPI一共有四種通訊模式, 它們的主要區別是總線空閑時SCK的時鐘狀態以及數據采樣時刻。為方便說明,在此引入“時鐘極性CPOL”和“時鐘相位CPHA”的概念。
時鐘極性CPOL是指SPI通訊設備處于空閑狀態時,SCK信號線的電平信號(即SPI通訊開始前、 NSS線為高電平時SCK的狀態)。CPOL=0時, SCK在空閑狀態時為低電平,CPOL=1時,則相反。
時鐘相位CPHA是指數據的采樣的時刻,當CPHA=0時,MOSI或MISO數據線上的信號將會在SCK時鐘線的“奇數邊沿”被采樣。當CPHA=1時, 數據線在SCK的“偶數邊沿”采樣。
由CPOL及CPHA的不同狀態,SPI分成了四種模式,見下表,SPI的四種模式 , 主機與從機需要工作在相同的模式下才可以正常通訊,實際中采用較多的是“模式0”與“模式3”:
| SPI 模式 | CPOL | CPHA | 空閑時 SCK 時鐘 | 采樣時刻 |
| 0 | 0 | 0 | 低電平 | 奇數邊沿 |
| 1 | 0 | 1 | 低電平 | 偶數邊沿 |
| 2 | 1 | 0 | 高電平 | 奇數邊沿 |
| 3 | 1 | 1 | 高電平 | 偶數邊沿 |
2 W55MH32的SPI特性及架構
與I2C外設一樣,W55MH32芯片也集成了專門用于SPI協議通訊的外設。
2.1 W55MH32的SPI外設簡介
SPI 接口可以配置為支持 SPI 協議或者支持 I2S 音頻協議。SPI 接口默認工作在 SPI 方式,可以通過軟件把功能從 SPI 模式切換到 I2S 模式。
串行外設接口(SPI)允許芯片與外部設備以半/全雙工、同步、串行方式通信。此接口可以被配置成主模式,并為外部從設備提供通信時鐘(SCK)。接口還能以多主配置方式工作。
它可用于多種用途,包括使用一條雙向數據線的雙線單工同步傳輸,還可使用 CRC 校驗的可靠通信。
3 線全雙工同步傳輸
帶或不帶第三根雙向數據線的雙線單工同步傳輸
8或16位傳輸幀格式選擇主或從操作,支持多主模式
8個主模式波特率預分頻系數(最大為fPCLK/2)
從模式頻率(最大為fPCLK/2)
主模式和從模式的快速通信
主模式和從模式下均可以由軟件或硬件進行NSS 管理:主/從操作模式的動態改變
可編程的時鐘極性和相位,可編程的數據順序,MSB在前或LSB在前
可觸發中斷的專用發送和接收標志
SPI 總線忙狀態標志
支持可靠通信的硬件CRC
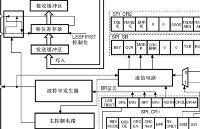
2.2 W55MH32的SPI架構剖析
W55MH32的SPI架構圖如下:
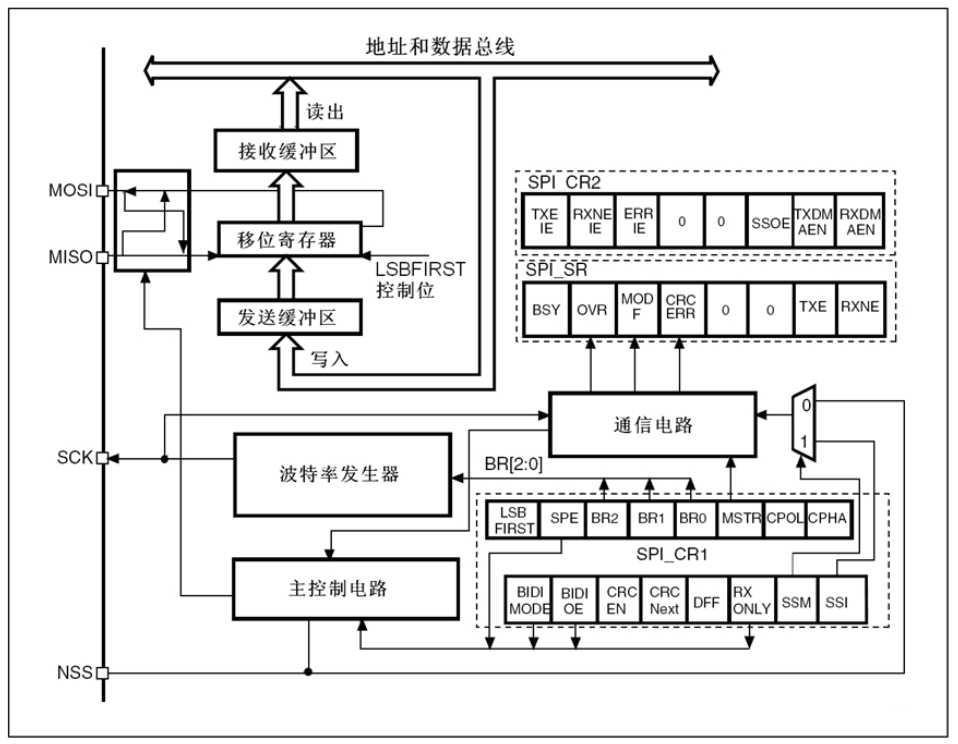
2.2.1 通訊引腳
SPI的所有硬件架構都從圖 SPI架構圖 中左側MOSI、MISO、SCK及NSS線展開的。W55MH32芯片有多個SPI外設, 它們的SPI通訊信號引出到不同的GPIO引腳上,使用時必須配置到這些指定的引腳,見下表,W55MH32的SPI引腳 。 關于GPIO引腳的復用功能,可查閱《W55MH32規格書》,以它為準。
| 引腳 | SPI1 | SPI2 | SPI3 |
| NSS | PA4 | PB12 | PA15 下載口的 TDI |
| CLK | PA5 | PB13 | PB3 下載口的 TDO |
| MISO | PA6 | PB14 | PB4 下載口的 NTRST |
| MOSI | PA7 | PB15 | PB5 |
2.2.4 整體控制邏輯
整體控制邏輯負責協調整個SPI外設,控制邏輯的工作模式根據我們配置的“控制寄存器(CR1/CR2)”的參數而改變, 基本的控制參數包括前面提到的SPI模式、波特率、LSB先行、主從模式、單雙向模式等等。在外設工作時, 控制邏輯會根據外設的工作狀態修改“狀態寄存器(SR)”,我們只要讀取狀態寄存器相關的寄存器位, 就可以了解SPI的工作狀態了。除此之外,控制邏輯還根據要求,負責控制產生SPI中斷信號、DMA請求及控制NSS信號線。
實際應用中,我們一般不使用W55MH32 SPI外設的標準NSS信號線,而是更簡單地使用普通的GPIO,軟件控制它的電平輸出,從而產生通訊起始和停止信號。
2.3 通訊過程
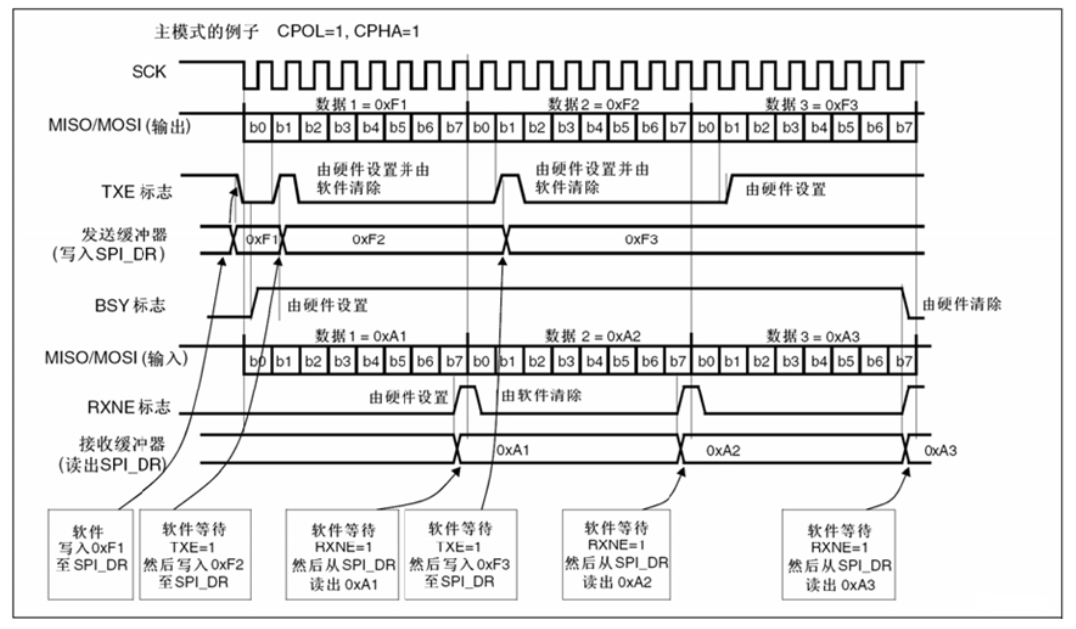
主或從模式下(BIDIMODE=0 并且 RXONLY=0)全雙工發送和接收過程模式,軟件必須遵循下述過程,發送和接收數據:
1. 設置 SPE 位為'1',使能 SPI 模塊;
2. 在 SPI_DR 寄存器中寫入第一個要發送的數據,這個操作會清除 TXE 標志;
3. 等待 TXE=1,然后寫入第二個要發送的數據。等待 RXNE=1,然后讀出 SPI_DR 寄存器并獲得第一個接收到的數據,讀 SPI_DR 的同時清除了 RXNE 位。重復這些操作,發送后續的數據同時接收 n-1 個數據;
4. 等待 RXNE=1,然后接收最后一個數據;
5. 等待 TXE=1,在 BSY=0 之后關閉 SPI 模塊。
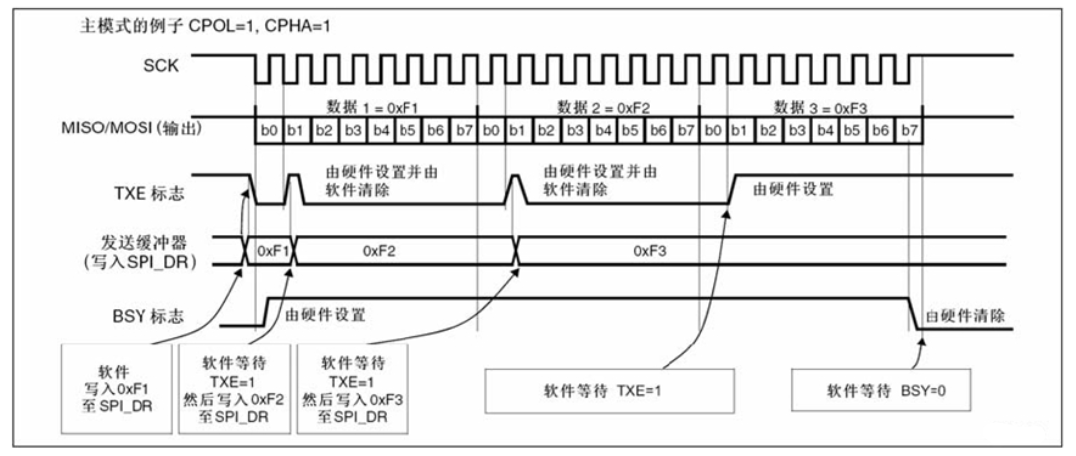
也可以在響應 RXNE 或 TXE 標志的上升沿產生的中斷的處理程序中實現這個過程。主模式、全雙工模式下(BIDIMODE=0 并且 RXONLY=0)連續傳輸時,TXE/RXNE/BSY 的變化示意圖如下:
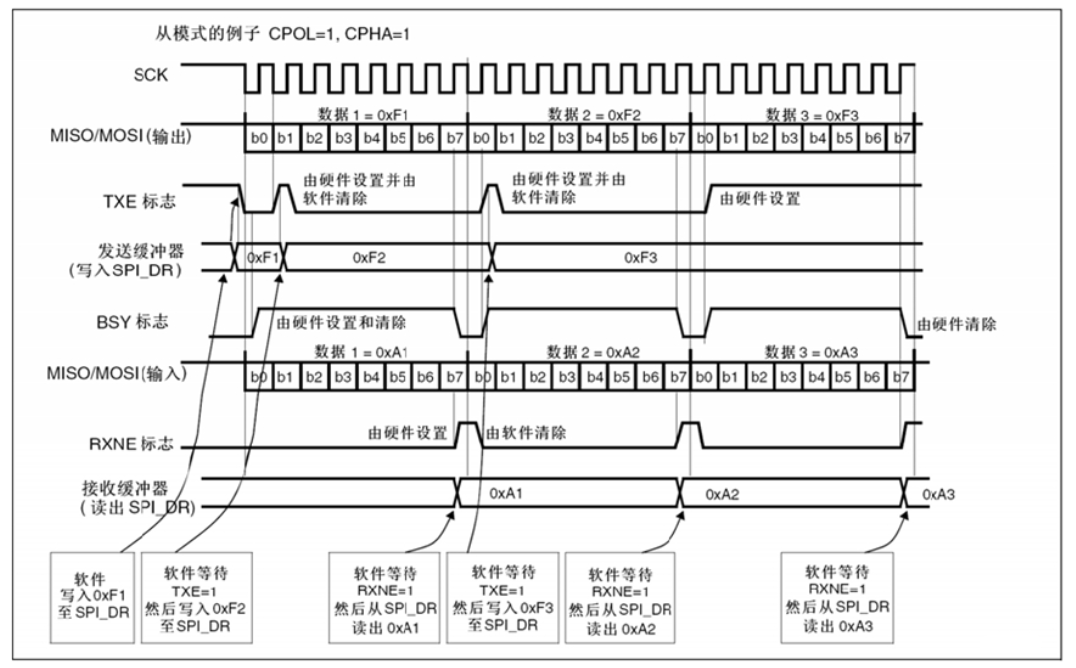
從模式、全雙工模式下(BIDIMODE=0 并且 RXONLY=0)連續傳輸時,TXE/RXNE/BSY 的變化只發送過程(BIDIMODE=0 并且 RXONLY=0)示意圖如下:
在此模式下,傳輸過程可以簡要說明如下,使用 BSY 位等待傳輸的結束:
1. 設置 SPE 位為”1“,使能 SPI 模塊;
2. 在 SPI_DR 寄存器中寫入第一個要發送的數據,這個操作會清除 TXE 標志;
3. 等待 TXE=1,然后寫入第二個要發送的數據。重復這個操作,發送后續的數據;
4. 寫入最后一個數據到 SPI_DR 寄存器之后,等待 TXE=1;然后等待 BSY=0,這表示最后一個數據的傳輸已經完成。也可以在響應 TXE 標志的上升沿產生的中斷的處理程序中實現這個過程。
注:
1.對于不連續的傳輸,在寫入 SPI_DR 寄存器的操作與設置 BSY 位之間有 2 個 APB 時鐘周期的延遲,因此在只發送模式下,寫入最后一個數據后,最好先等待 TXE=1,然后再等待 BSY=0。454/671 W55MH32 參考手冊 V1.0.0。
2.只發送模式下,在傳輸 2 個數據之后,由于不會讀出接收到的數據,SPI_SR 寄存器中的 OVR位會變為'1'。軟件不必理會這個 OVR 標志。
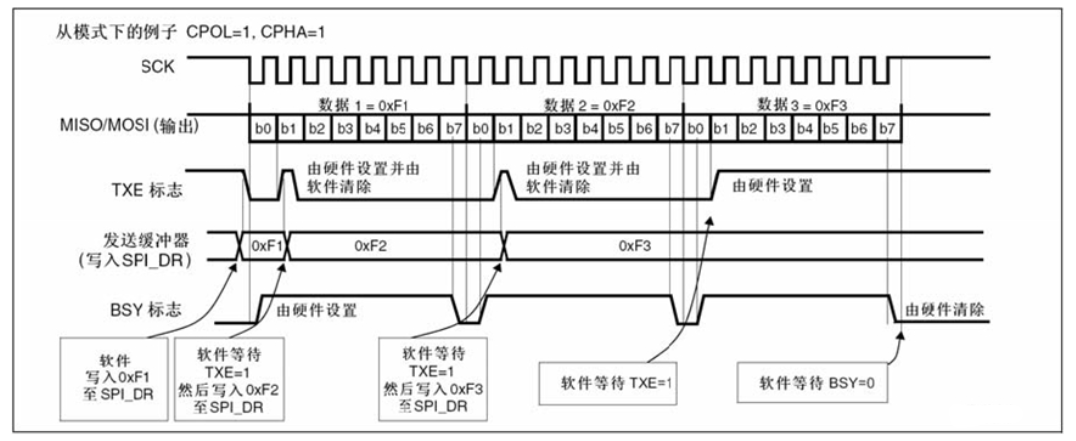
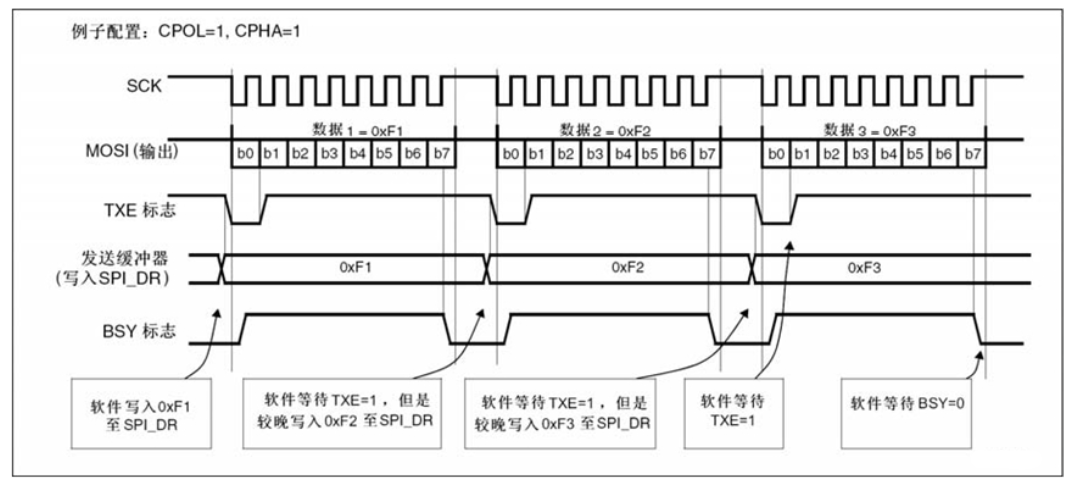
主設備只發送模式(BIDIMODE=0 并且 RXONLY=0)下連續傳輸時,TXE/BSY 變化示意圖如下:
從設備只發送模式(BIDIMODE=0 并且 RXONLY=0)下連續傳輸時,TXE/BSY 變化示意圖如下:
雙向發送過程(BIDIMODE=1 并且 BIDIOE=1)
在此模式下,操作過程類似于只發送模式,不同的是:在使能 SPI 模塊之前,需要在 SPI_CR2 寄存器中同時設置 BIDIMODE 和 BIDIOE 位為”1” 。
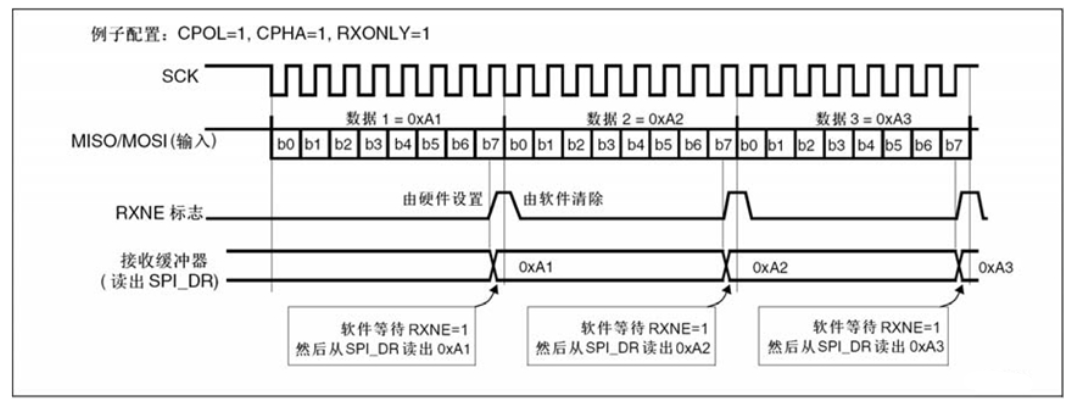
單向只接收模式(BIDIMODE=0 并且 RXONLY=1)
在此模式下,傳輸過程可以簡要說明如下:
1. 在 SPI_CR2 寄存器中,設置 RXONLY=1;
2. 設置 SPE=1,使能 SPI 模塊:
a) 主模式下,立刻產生 SCK 時鐘信號,在關閉 SPI(SPE=0)之前,不斷地接收串行數據;
b) 從模式下,當 SPI 主設備拉低 NSS 信號并產生 SCK 時鐘時,接收串行數據。
3. 等待 RXNE=1,然后讀出 SPI_DR 寄存器以獲得收到的數據(同時會清除 RXNE 位)。重復這個操作接收所有數據。
也可以在響應 RXNE 標志的上升沿產生的中斷的處理程序中實現這個過程。只接收模式(BIDIMODE=0 并且 RXONLY=1)下連續傳輸時,RXNE 變化示意圖如下:
單向接收過程(BIDIMODE=1 并且 BIDIOE=0)
在此模式下,操作過程類似于只接收模式,不同的是:在使能 SPI 模塊之前,需要在 SPI_CR2 寄存器中設置 BIDIMODE 為'1'并清除 BIDIOE 位為'0'。
連續和非連續傳輸
當在主模式下發送數據時,如果軟件足夠快,能夠在檢測到每次 TXE 的上升沿(或 TXE 中斷),并立即在正在進行的傳輸結束之前寫入 SPI_DR 寄存器,則能夠實現連續的通信;此時,在每個數據項的傳輸之間的 SPI 時鐘保持連續,同時 BSY 位不會被清除。
如果軟件不夠快,則會導致不連續的通信;這時,在每個數據傳輸之間會被清除。在主模式的只接收模式下(RXONLY=1),通信總是連續的,而且 BSY 標志始終為'1'。
在從模式下,通信的連續性由 SPI 主設備決定。不管怎樣,即使通信是連續的,BSY 標志會在每個數據項之間至少有一個 SPI 時鐘周期為低。非連續傳輸發送(BIDIMODE=0 并且 RXONLY=0)時,TXE/BSY 變化示意圖如下:
3 SPI初始化結構體詳解
跟其它外設一樣,W55MH32標準庫提供了SPI初始化結構體及初始化函數來配置SPI外設。 初始化結構體及函數定義在庫文件“w55mh32_spi.h”及“w55mh32_spi.c”中,編程時我們可以結合這兩個文件內的注釋使用或參考庫幫助文檔。 了解初始化結構體后我們就能對SPI外設運用自如了,見代碼清單:SPI-1 :
代碼清單:SPI-1 SPI初始化結構體
typedef struct
{
uint16_t SPI_Direction; /*設置SPI的單雙向模式 */
uint16_t SPI_Mode; /*設置SPI的主/從機端模式 */
uint16_t SPI_DataSize; /*設置SPI的數據幀長度,可選8/16位 */
uint16_t SPI_CPOL; /*設置時鐘極性CPOL,可選高/低電平*/
uint16_t SPI_CPHA; /*設置時鐘相位,可選奇/偶數邊沿采樣 */
uint16_t SPI_NSS; /*設置NSS引腳由SPI硬件控制還是軟件控制*/
uint16_t SPI_BaudRatePrescaler; /*設置時鐘分頻因子,fpclk/分頻數=fSCK */
uint16_t SPI_FirstBit; /*設置MSB/LSB先行 */
uint16_t SPI_CRCPolynomial; /*設置CRC校驗的表達式 */
} SPI_InitTypeDef;
這些結構體成員說明如下,其中括號內的文字是對應參數在W55MH32標準庫中定義的宏:
SPI_Direction
本成員設置SPI的通訊方向,可設置為雙線全雙工(SPI_Direction_2Lines_FullDuplex),雙線只接收(SPI_Direction_2Lines_RxOnly), 單線只接收(SPI_Direction_1Line_Rx)、單線只發送模式(SPI_Direction_1Line_Tx)。
SPI_Mode
本成員設置SPI工作在主機模式(SPI_Mode_Master)或從機模式(SPI_Mode_Slave ), 這兩個模式的最大區別為SPI的SCK信號線的時序, SCK的時序是由通訊中的主機產生的。若被配置為從機模式,W55MH32的SPI外設將接受外來的SCK信號。
SPI_DataSize
本成員可以選擇SPI通訊的數據幀大小是為8位(SPI_DataSize_8b)還是16位(SPI_DataSize_16b)。
SPI_CPOL和SPI_CPHA
這兩個成員配置SPI的時鐘極性CPOL和時鐘相位CPHA,這兩個配置影響到SPI的通訊模式, 關于CPOL和CPHA的說明參考前面“通訊模式”小節。
時鐘極性CPOL成員,可設置為高電平(SPI_CPOL_High)或低電平(SPI_CPOL_Low )。時鐘相位CPHA 則可以設置為SPI_CPHA_1Edge(在SCK的奇數邊沿采集數據) 或SPI_CPHA_2Edge(在SCK的偶數邊沿采集數據) 。
SPI_NSS
本成員配置NSS引腳的使用模式,可以選擇為硬件模式(SPI_NSS_Hard )與軟件模式(SPI_NSS_Soft ), 在硬件模式中的SPI片選信號由SPI硬件自動產生,而軟件模式則需要我們親自把相應的GPIO端口拉高或置低產生非片選和片選信號。實際中軟件模式應用比較多。
SPI_BaudRatePrescaler
本成員設置波特率分頻因子,分頻后的時鐘即為SPI的SCK信號線的時鐘頻率。這個成員參數可設置為fpclk的2、4、6、8、16、32、64、128、256分頻。
SPI_FirstBit
所有串行的通訊協議都會有MSB先行(高位數據在前)還是LSB先行(低位數據在前)的問題,而W55MH32的SPI模塊可以通過這個結構體成員,對這個特性編程控制。
SPI_CRCPolynomial
這是SPI的CRC校驗中的多項式,若我們使用CRC校驗時,就使用這個成員的參數(多項式),來計算CRC的值。
配置完這些結構體成員后,我們要調用SPI_Init函數把這些參數寫入到寄存器中,實現SPI的初始化,然后調用SPI_Cmd來使能SPI外設。
4 SPI—DMA
4.1 編程要點
初始化通訊使用的目標引腳及端口時鐘;
使能SPI外設的時鐘;
配置SPI外設的模式、地址、速率等參數并使能SPI外設;
編寫基本SPI按字節收發的函數;
編寫對FLASH擦除及讀寫操作的的函數;
編寫測試程序,對讀寫數據進行校驗。
4.2 代碼分析
這段代碼實現了 W55MH32 微控制器的 SPI 主模式 DMA 數據傳輸,通過 DMA 控制器高速發送數據到 SPI 總線。
1. 整體架構
#include "w55mh32.h" // 芯片頭文件 #include "delay.h" // 延時函數 // 全局變量 USART_TypeDef *USART_TEST = USART1; // 串口1 #define SPI_BUFF_SIZE 256 uint8_t SPI_TX_BUFF[SPI_BUFF_SIZE]; // 發送緩沖區 uint8_t SPI_RX_BUFF[SPI_BUFF_SIZE]; // 接收緩沖區(未使用)
包含芯片相關頭文件和自定義延時函數。
定義 SPI 緩沖區大小(256 字節),填充發送緩沖區為 0x01, 0x02, ..., 0xFF。
2. 主函數 main
int main(void)
{
// 初始化系統時鐘、串口、SPI、DMA
delay_init();
UART_Configuration(115200); // 串口波特率 115200
SPI_Configuration(); // 配置 SPI1 為主模式
DMA_Configuration(); // 配置 DMA 通道 2(接收)和 3(發送)
// 填充發送緩沖區:0x01, 0x02, ..., 0xFF
for (i = 0; i < SPI_BUFF_SIZE; i++) {
SPI_TX_BUFF[i] = i + 1;
}
// 啟動 SPI DMA 發送
GPIO_ResetBits(GPIOA, GPIO_Pin_4); // 拉低片選(CS)
DMA_Cmd(DMA1_Channel3, ENABLE); // 啟用 DMA 發送通道
while (!DMA_GetFlagStatus(DMA1_FLAG_TC3)); // 等待傳輸完成
DMA_ClearFlag(DMA1_FLAG_TC3); // 清除傳輸完成標志
DMA_Cmd(DMA1_Channel3, DISABLE); // 禁用 DMA 通道
GPIO_SetBits(GPIOA, GPIO_Pin_4); // 拉高片選(CS)
while (1); // 主循環(無操作)
}
功能:通過 SPI 主模式,使用 DMA 高速發送 256 字節數據(SPI_TX_BUFF)。
流程:初始化 → 填充緩沖區 → 片選有效 → 啟動 DMA 發送 → 等待完成 → 片選無效。
3. SPI 配置 SPI_Configuration
void SPI_Configuration(void)
{
// 使能 SPI1 和 GPIOA 時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1 | RCC_APB2Periph_GPIOA, ENABLE);
// 配置片選(CS)引腳(PA4)為推挽輸出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA, GPIO_Pin_4); // 初始拉高(非選中狀態)
// 配置 SPI 引腳(PA5/SCK, PA6/MISO, PA7/MOSI)為復用推挽
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 初始化 SPI1 參數
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // 主模式
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; // 時鐘空閑高電平(模式 3)
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; // 第二個邊沿采樣
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; // 低速(用于調試)
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE); // 使能 SPI1
}
SPI 參數:主模式,全雙工,8 位數據。
時鐘極性(CPOL):高電平(SPI 模式 3)。
時鐘相位(CPHA):第二個邊沿采樣。
波特率:系統時鐘 / 256(低速,適合調試)。
引腳分配:
PA4:片選(CS,軟件控制)。
PA5:SCK(SPI 時鐘)。
PA6:MISO(主輸入)。
PA7:MOSI(主輸出)。
4. DMA 配置 DMA_Configuration
void DMA_Configuration(void)
{
// 使能 DMA1 時鐘
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
// 配置 DMA 通道 3(SPI1 發送)
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST; // 內存 → 外設(發送)
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&SPI1->DR; // 外設地址:SPI 數據寄存器
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)SPI_TX_BUFF; // 內存地址:發送緩沖區
DMA_InitStructure.DMA_BufferSize = SPI_BUFF_SIZE; // 傳輸大小:256 字節
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 外設地址不變
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; // 內存地址遞增
DMA_Init(DMA1_Channel3, &DMA_InitStructure);
SPI_I2S_DMACmd(SPI1, SPI_I2S_DMAReq_Tx, ENABLE); // 使能 SPI 發送 DMA 請求
// 配置 DMA 通道 2(SPI1 接收,未使用)
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; // 外設 → 內存(接收)
DMA_Init(DMA1_Channel2, &DMA_InitStructure);
SPI_I2S_DMACmd(SPI1, SPI_I2S_DMAReq_Rx, ENABLE); // 使能 SPI 接收 DMA 請求(未啟用)
}
DMA 通道 3(發送):
方向:內存(SPI_TX_BUFF)→ 外設(SPI1->DR)。
觸發源:SPI1 發送緩沖區空(TXE 標志)。
DMA 通道 2(接收):
方向:外設(SPI1->DR)→ 內存(SPI_RX_BUFF)。
觸發源:SPI1 接收緩沖區滿(RXNE 標志)。
注意:代碼中僅啟用了發送通道(DMA1_Channel3),接收通道未使用。
5. 串口配置(用于打印調試信息)
void UART_Configuration(uint32_t bound) { /* 配置串口1,波特率 115200 */ }
int fputc(int c, FILE *f) { /* 重定向 printf 到串口 */ }
串口用于打印系統時鐘信息(僅初始化時執行一次)。
無實際數據接收功能,僅用于調試輸出。
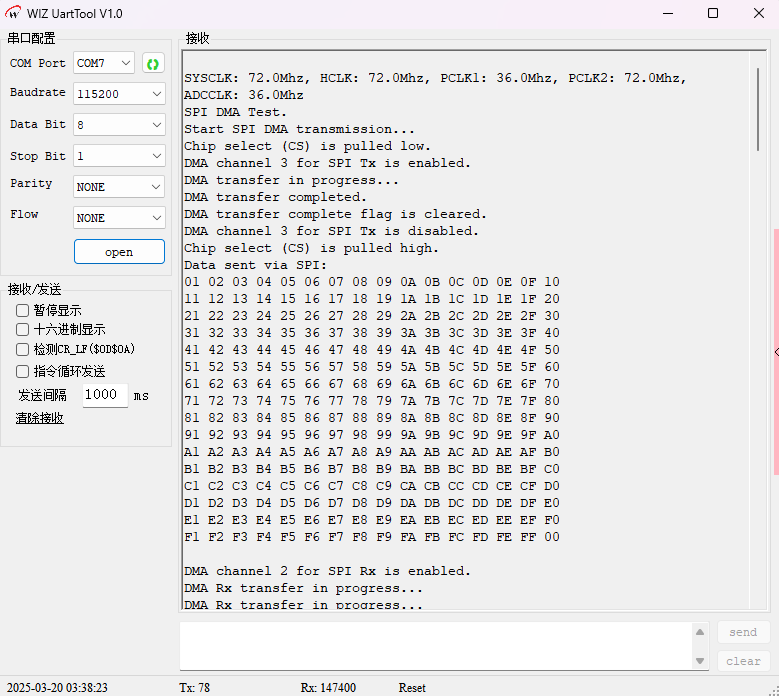
4.3 下載驗證
在電腦端打開串口調試助手, 把編譯好的程序下載到開發板。在串口調試助手可看到測試的調試信息:
如果想要了解具體的執行步驟,則可以在初始化添加如下代碼:
SPI_Configuration();
DMA_Configuration();
//Tx Data Test
printf("Start SPI DMA transmission...n");
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
printf("Chip select (CS) is pulled low.n");
DMA_Cmd(DMA1_Channel3, ENABLE);
printf("DMA channel 3 for SPI Tx is enabled.n");
// 等待 DMA 傳輸完成并打印狀態
while (!DMA_GetFlagStatus(DMA1_FLAG_TC3))
{
// 可以添加更多狀態監測信息,例如 DMA 剩余傳輸數量
printf("DMA transfer in progress...n");
delay_ms(10);
}
printf("DMA transfer completed.n");
DMA_ClearFlag(DMA1_FLAG_TC3);
printf("DMA transfer complete flag is cleared.n");
DMA_Cmd(DMA1_Channel3, DISABLE);
printf("DMA channel 3 for SPI Tx is disabled.n");
delay_ms(100);
GPIO_SetBits(GPIOA, GPIO_Pin_4);
printf("Chip select (CS) is pulled high.n");
// 打印發送的數據
printf("Data sent via SPI:n");
for (i = 0; i < SPI_BUFF_SIZE; i++)
{
printf("%02X ", SPI_TX_BUFF[i]);
if ((i + 1) % 16 == 0)
{
printf("n");
}
}
printf("n");
// 啟動 DMA 接收(如果需要)
DMA_Cmd(DMA1_Channel2, ENABLE);
printf("DMA channel 2 for SPI Rx is enabled.n");
while (!DMA_GetFlagStatus(DMA1_FLAG_TC2))
{
printf("DMA Rx transfer in progress...n");
delay_ms(10);
}
printf("DMA Rx transfer completed.n");
DMA_ClearFlag(DMA1_FLAG_TC2);
printf("DMA Rx transfer complete flag is cleared.n");
DMA_Cmd(DMA1_Channel2, DISABLE);
printf("DMA channel 2 for SPI Rx is disabled.n");
// 打印接收的數據
printf("Data received via SPI:n");
for (i = 0; i < SPI_BUFF_SIZE; i++)
{
printf("%02X ", SPI_RX_BUFF[i]);
if ((i + 1) % 16 == 0)
{
printf("n");
}
}
printf("n");
以下便是程序執行過程中打印的調試信息了:
WIZnet 是一家無晶圓廠半導體公司,成立于 1998 年。產品包括互聯網處理器 iMCU?,它采用 TOE(TCP/IP 卸載引擎)技術,基于獨特的專利全硬連線 TCP/IP。iMCU? 面向各種應用中的嵌入式互聯網設備。
WIZnet 在全球擁有 70 多家分銷商,在香港、韓國、美國設有辦事處,提供技術支持和產品營銷。
香港辦事處管理的區域包括:澳大利亞、印度、土耳其、亞洲(韓國和日本除外)。
-
單片機
+關注
關注
6067文章
44961瀏覽量
648873 -
以太網
+關注
關注
40文章
5610瀏覽量
175363 -
FlaSh
+關注
關注
10文章
1674瀏覽量
151343 -
SPI
+關注
關注
17文章
1791瀏覽量
95260
發布評論請先 登錄
第十七章 SPI
文檔更新 | 迅為RK3568驅動指南-第十七篇(串口)
太陽能充放電控制————求解
模擬電路網絡課件 第十七節:結型場效應管
基于紅牛開發板的spi flash讀寫圖片

【正點原子FPGA連載】第三十七章雙路高速AD實驗 -摘自【正點原子】新起點之FPGA開發指南_V2.1

"STM32H7學習繼續(STM32H7系列5)第十七章比較實用,以后寫程序的時候會用到"
25章 SPI—讀寫串行FLASH
STM32入門(二十六)----SPI—讀寫串行FLASH





 工商網監
工商網監
評論