 基于LockAI視覺識別模塊:C++圖像的基本運算
基于LockAI視覺識別模塊:C++圖像的基本運算
在圖像處理中,理解圖像的基本操作是掌握計算機視覺技術的關鍵。本文章將介紹 基于LockAI視覺識別模塊下OpenCV 中圖像的基本運算方法,包括像素操作、邏輯運算和差值運算,并通過一個綜合示例展示其實際應用。
1. 基本知識講解
1.1 圖像坐標系
在圖像處理中,坐標是一個非常重要的概念:
原點:圖像的左上角為原點 (0, 0)。
x 軸:從左到右遞增。
y 軸:從上到下遞增。
1.2 圖像的基本屬性
每張圖像都有以下基本屬性:
寬度(Width):圖像的列數。
高度(Height):圖像的行數。
通道數(Channels):
灰度圖:1 個通道。
彩色圖:通常為 3 個通道(BGR)。
1.3 圖像的基本操作
圖像的基本操作包括:
獲取和設置像素值:訪問和修改圖像中的像素值。
邏輯運算:如按位與、或、異或等。
差值運算:計算兩張圖像之間的差異。
2.API文檔
2.1 頭文件
#include
2.2 獲取設置像素點
ucharcv::at<uchar>(introw,intcol)const;// 灰度圖
cv::Vec3bcv::at<cv::Vec3b>(introw,intcol)const;// 彩色圖
參數:
row:行索引(y坐標)
col:列索引(x坐標)
返回值:
對于灰度圖,返回單通道值(unchar)
對于彩色圖,返回三通道值(cv::Vec3b)
2.3 設置像素點:
voidcv::at<uchar>(introw,intcol)=value;// 灰度圖
voidcv::at<cv::Vec3b>(introw,intcol)=value;// 彩色圖
參數:
row:行索引(y坐標)
col:列索引(x坐標)
value:要設置的像素值(uchar或cv::Vec3b)
2.4 獲取圖像的寬度和高度
2.4.1 獲取寬度
intcv::cols;
返回值
返回圖像的寬度(列數)
2.4.2 獲取高度
intcv::rows;
返回值
返回圖像的高度(行數)
2.5 獲取圖像的格式和大小
2.5.1 判斷是否為灰度圖
intcv::channels();
返回值
1表示灰度圖
3表示彩色圖
2.5.2 獲取圖像大小(字節數)
size_tcv::total();// 總像素數
size_tcv::elemSize();// 每個像素的字節數
size_ttotalBytes=img.total()*img.elemSize();//計算公式
返回值
返回圖像的總字節數
2.6 圖像取反
voidcv::bitwise_not(InputArraysrc,OutputArraydst);
參數:
src:輸入圖像(cv::Mat)
dst:輸出圖像(cv::Mat)
返回值:
結果儲存在dst中
2.7 圖像邏輯運算
2.7.1 按位與(AND)
voidcv::bitwise_and(InputArraysrc1,InputArraysrc2,OutputArraydst);
-參數:
src1:輸入圖像1(cv::Mat)
src2:輸入圖像2(cv::Mat)
dst:輸出圖像(cv::Mat)
返回值:
結果儲存在dst中
2.7.2 按位或(OR)
voidcv::bitwise_or(InputArraysrc1,InputArraysrc2,OutputArraydst);
參數:
src1:輸入圖像1(cv::Mat)
src2:輸入圖像2(cv::Mat)
dst:輸出圖像(cv::Mat)
返回值:
結果儲存在dst中
2.7.3 按位異或(XOR)
voidcv::bitwise_xor(InputArraysrc1,InputArraysrc2,OutputArraydst);
參數:
src1:輸入圖像1(cv::Mat)
src2:輸入圖像2(cv::Mat)
dst:輸出圖像(cv::Mat)
返回值:
結果儲存在dst中
2.7.4 按位取反(NOT)
voidcv::bitwise_not(InputArraysrc,OutputArraydst);
參數:
src:輸入圖像(cv::Mat)
dst:輸出圖像(cv::Mat)
返回值:
結果儲存在dst中
2.7.5 復雜的圖像邏輯運算
如果需要實現復雜的邏輯運算(如NAND、NOR、NXOR等),可以通過組合上述基本函數來完成。例如:**NAND 與非運算
cv::MatnandResult;
cv::bitwise_and(img1,img2,nandResult);// 計算 AND
cv::bitwise_not(nandResult,nandResult);// 取反得到 NAND
通過這樣的組合我們就可以實現更為復雜的邏輯運算了。
2.8 絕對差值
voidcv::absdiff(InputArraysrc1,InputArraysrc2,OutputArraydst);
參數:
src1:輸入圖像1(cv::Mat)
src2:輸入圖像2(cv::Mat)
dst:輸出圖像(cv::Mat)
返回值:
結果儲存在dst中
3.綜合代碼解析
3.1 流程圖
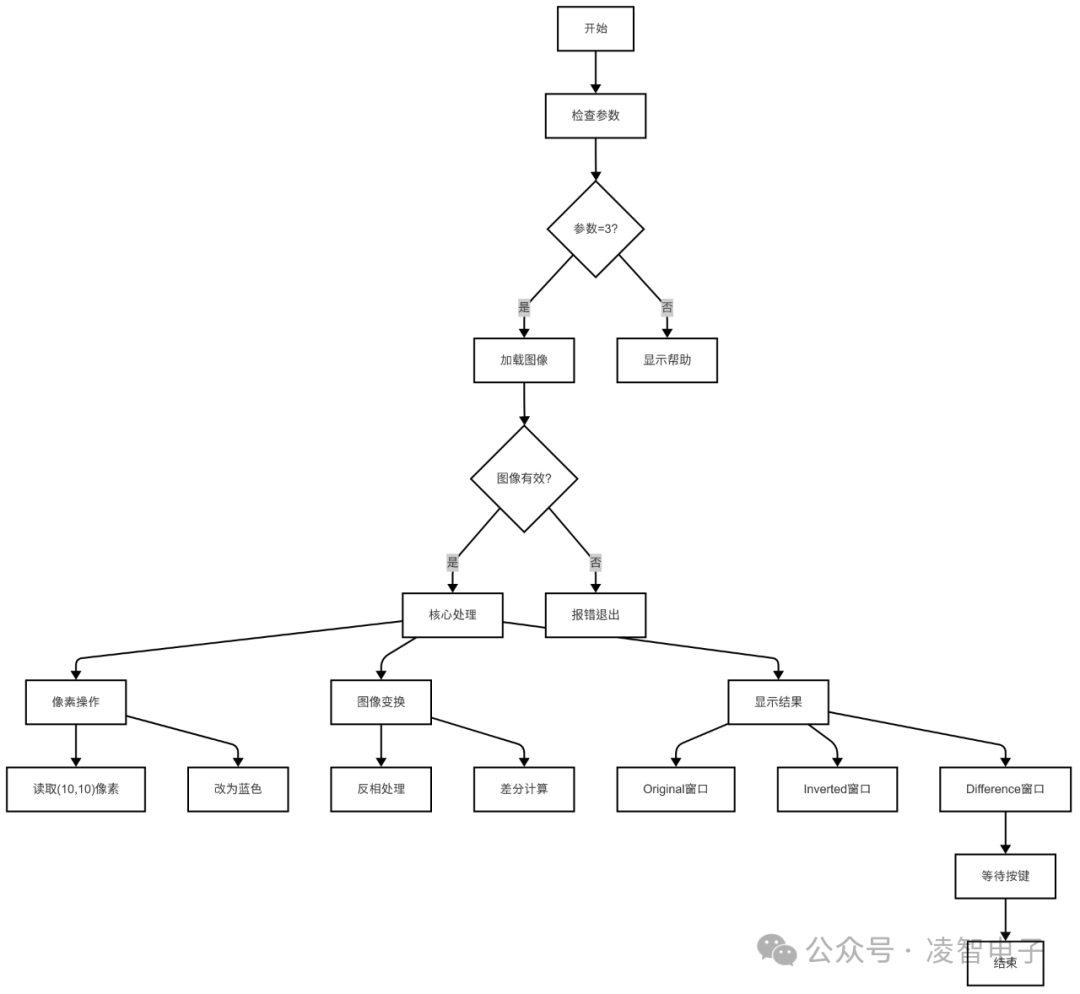
3.2 代碼解析
像素操作
// 從(10,10)開始,寬40,高40,設置為藍色
cv::Rectroi(10,10,40,40);
image1(roi).setTo(cv::Scalar(255,0,0));
圖像變換
// 圖像取反
cv::MatinvertedImage;
cv::bitwise_not(image1,invertedImage);
// 圖像差分
cv::MatdiffImage;
cv::absdiff(image1,image2,diffImage);
顯示結果
// 顯示結果
cv::imshow("Original Image",image1);
cv::imshow("Inverted Image",invertedImage);
cv::imshow("Difference Image",diffImage);
3.3 代碼實現
#include
#include
#include
intmain(intargc,char*argv[])
{
// 檢查命令行參數數量是否正確
if(argc!=3)
{
std::cerr<<"Usage: "<<argv[0]<<" "<<std::endl;
return-1;
}
// 從命令行參數中讀取圖像路徑
std::stringimage1Path=argv[1];
std::stringimage2Path=argv[2];
// 加載圖像
cv::Matimage1=cv::imread(image1Path);
cv::Matimage2=cv::imread(image2Path);
// 檢查圖像是否加載成功
if(image1.empty()||image2.empty())
{
std::cerr<<"Error: Could not load images!"<<std::endl;
return-1;
}
// 獲取圖像尺寸
intwidth=image1.cols;
intheight=image1.rows;
std::cout<<"Image size: "<<width<<"x"<<height<<std::endl;
// 從(10,10)開始,寬40,高40,設置為藍色
cv::Rectroi(10,10,40,40);
image1(roi).setTo(cv::Scalar(255,0,0));
// 圖像取反
cv::MatinvertedImage;
cv::bitwise_not(image1,invertedImage);
// 圖像差分
cv::MatdiffImage;
cv::absdiff(image1,image2,diffImage);
// 顯示結果
cv::imshow("Original Image",image1);
cv::imshow("Inverted Image",invertedImage);
cv::imshow("Difference Image",diffImage);
cv::waitKey(0);
return0;
}
4. 編譯過程
4.1 編譯環境搭建
請確保你已經按照開發環境搭建指南正確配置了開發環境。
同時以正確連接開發板。
4.2 Cmake介紹
# CMake最低版本要求
cmake_minimum_required(VERSION3.10)
project(test-basic-method)
set(CMAKE_CXX_STANDARD17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# 定義項目根目錄路徑
set(PROJECT_ROOT_PATH"${CMAKE_CURRENT_SOURCE_DIR}/../..")
message("PROJECT_ROOT_PATH = "${PROJECT_ROOT_PATH})
include("${PROJECT_ROOT_PATH}/toolchains/arm-rockchip830-linux-uclibcgnueabihf.toolchain.cmake")
# 定義 OpenCV SDK 路徑
set(OpenCV_ROOT_PATH"${PROJECT_ROOT_PATH}/third_party/opencv-mobile-4.10.0-lockzhiner-vision-module")
set(OpenCV_DIR"${OpenCV_ROOT_PATH}/lib/cmake/opencv4")
find_package(OpenCV REQUIRED)
set(OPENCV_LIBRARIES"${OpenCV_LIBS}")
# 定義 LockzhinerVisionModule SDK 路徑
set(LockzhinerVisionModule_ROOT_PATH"${PROJECT_ROOT_PATH}/third_party/lockzhiner_vision_module_sdk")
set(LockzhinerVisionModule_DIR"${LockzhinerVisionModule_ROOT_PATH}/lib/cmake/lockzhiner_vision_module")
find_package(LockzhinerVisionModule REQUIRED)
# 基本圖像處理示例
add_executable(Test-basic-method basic_method.cc)
target_include_directories(Test-basic-method PRIVATE${LOCKZHINER_VISION_MODULE_INCLUDE_DIRS})
target_link_libraries(Test-basic-method PRIVATE${OPENCV_LIBRARIES}${LOCKZHINER_VISION_MODULE_LIBRARIES})
install(
TARGETS Test-basic-method
RUNTIME DESTINATION .
)
4.3 編譯項目
使用 Docker Destop 打開 LockzhinerVisionModule 容器并執行以下命令來編譯項目
# 進入Demo所在目錄
cd/LockzhinerVisionModuleWorkSpace/LockzhinerVisionModule/Cpp_example/B01_basic_method
# 創建編譯目錄
rm-rfbuild &&mkdirbuild &&cdbuild
# 配置交叉編譯工具鏈
exportTOOLCHAIN_ROOT_PATH="/LockzhinerVisionModuleWorkSpace/arm-rockchip830-linux-uclibcgnueabihf"
# 使用cmake配置項目
cmake ..
# 執行編譯項目
make-j8&&makeinstall
在執行完上述命令后,會在build目錄下生成可執行文件。
5. 例程運行示例
5.1 運行過程
在凌智視覺模塊中輸入以下命令:
chmod777Test-basic-method
# 需要輸入兩張大小一樣的圖片
./Test-basic-method image1_path image2_path
5.2 運行結果
原始圖像左上角加上一個40*40的矩形藍像素點
圖像差分結果:
6.總結
通過上述內容,我們介紹了圖像的基本操作及其對應的 OpenCV API。按照以下步驟,您可以輕松地進行圖像的基本運算:
獲取和設置像素值:使用 cv::at 方法訪問和修改像素。
邏輯運算:使用 cv::bitwise_and、cv::bitwise_or 等函數實現邏輯運算。
差值運算:使用 cv::absdiff 計算圖像之間的差異。
復雜運算:通過組合基本函數實現更復雜的邏輯運算。
-
視覺識別
+關注
關注
3文章
101瀏覽量
16974 -
AI視覺
+關注
關注
0文章
82瀏覽量
4709
發布評論請先 登錄
基于LockAI視覺識別模塊:C++使用圖像的統計信息
基于LockAI視覺識別模塊:C++尋找色塊
基于LockAI視覺識別模塊:C++模板匹配
基于LockAI視覺識別模塊:C++多模板匹配
基于LockAI視覺識別模塊:C++輪廓檢測
基于LockAI視覺識別模塊:C++條碼識別
基于LockAI視覺識別模塊:C++使用圖像的統計信息

# 基于LockAI視覺識別模塊:C++尋找色塊
基于LockAI視覺識別模塊:C++模板匹配
基于LockAI視覺識別模塊:C++二維碼識別
基于LockAI視覺識別模塊:C++條碼識別





 工商網監
工商網監
評論