 ADA4570具有差分輸出的集成AMR角度傳感器和信號調節器技術手冊
ADA4570具有差分輸出的集成AMR角度傳感器和信號調節器技術手冊
概述
ADA4570 是一款各向異性磁阻 (AMR) 傳感器,具有集成信號調理放大器和模數轉換器 (ADC) 驅動器。ADA4570 產生兩個差分模擬輸出,指示周圍磁場的角位置。
ADA4570 由一個封裝內的兩個裸片、一個 AMR 傳感器和一個固定增益儀器儀表放大器組成。當磁場在 x 軸和 y 軸 (x-y) 平面上旋轉時,ADA4570 提供與角度相關的放大差分余弦和正弦輸出信號。輸出電壓范圍與電源電壓成比例。
傳感器包含兩個惠斯通電橋,彼此成 45 度角。偶極磁鐵的完整旋轉會在正弦輸出上產生兩個周期。因此,根據 SIN 和 COS 差分輸出計算出的磁角 (α) 代表了在 0° 至 180° 測量范圍內,磁體相對于 ADA4570 的物理方向。在 x-y 平面的均勻場內,ADA4570 的輸出信號與 z 方向(氣隙)的物理位置無關。
ADA4570 采用 8 引腳 SOIC 封裝。
數據表:*附件:ADA4570具有差分輸出的集成AMR角度傳感器和信號調節器技術手冊.pdf
應用
- 絕對位置測量(線性和角度)
- 無刷直流電機控制和定位
- 執行器控制和定位
- 非接觸式角度測量和檢測
- 磁性角位置檢測
特性
- 非接觸式角度測量
- 高精度 180 度角傳感器
- 典型角度誤差為 ±0.1°
- 850 μV rms 低輸出噪聲
- 正弦和余弦差分輸出
- 比率模擬電壓輸出
- 可忽略的滯后
- 兼容 SAR 或 Σ-Δ ADC
- 溫度補償 AMR 橋
- 工業溫度范圍:?40°C 至 +125°C
- 汽車溫度范圍:?40°C 至 +150°C
- 抗電磁干擾
- 故障診斷
- V
DD范圍為 2.7 V 至 5.5 V - 30000 rpm 時的最小相位誤差為 0.85°
- AEC-Q100 適用于汽車應用
- 單芯片解決方案
- 采用 8 引腳 SOIC 封裝
框圖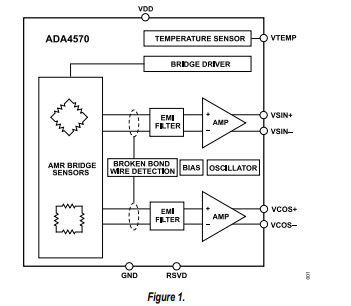
引腳配置描述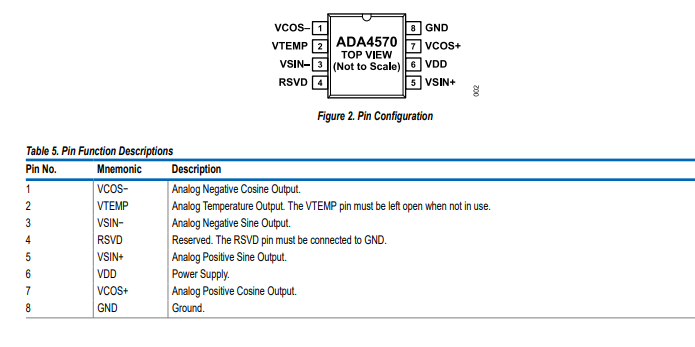
典型性能特征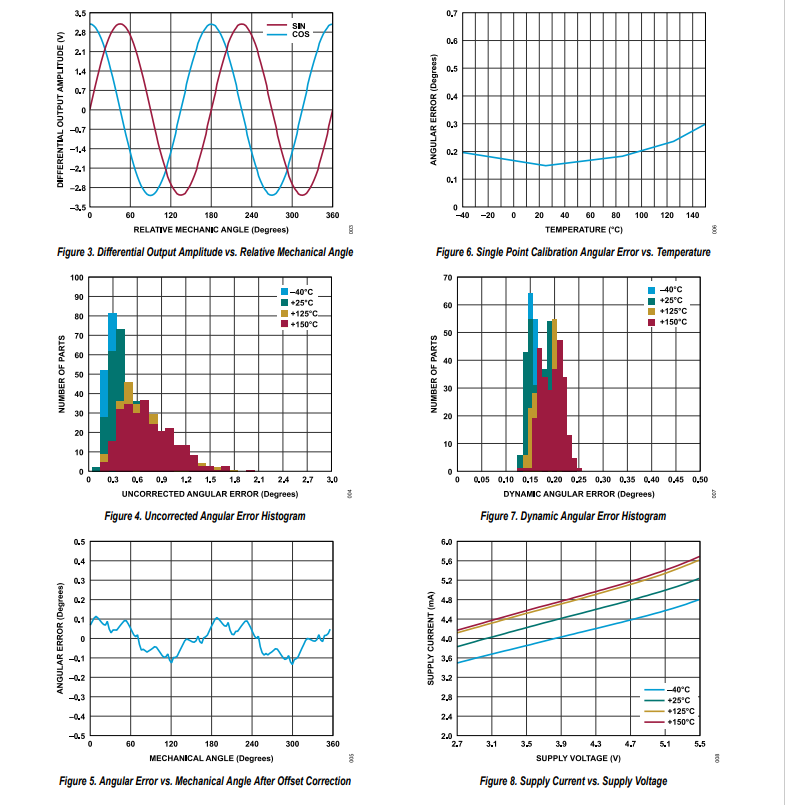
術語
輸出信號
AD4570的輸出信號VSIN+、VSIN-、VCOS+和VCOS- 以VDID2為共模電壓,如圖14所示。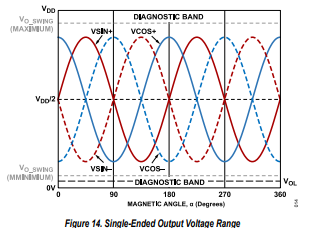
圖15中所示的差分信號輸出VSIN和VCOS,是通過對相應的正、負SIN和COS單端輸出進行采樣生成的。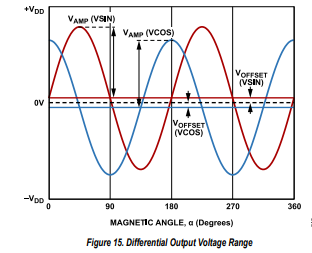
參考位置誤差
參考位置誤差是傳感元件中心與圖22所示的標稱位置之間的偏差。
參考角度誤差
參考角度誤差,如圖16所示,是傳感器與其標稱安裝位置之間的絕對安裝角度誤差。0°參考角是引腳2和引腳7之間的直線。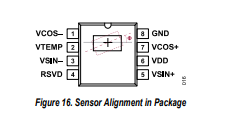
未校正角度誤差
未校正角度誤差是在未對VSIN和VCOS差分信號應用任何角度校準的情況下,與理想角度的最大偏差。
單點校準角度誤差
單點校準角度誤差是在25°C下對VSIN和VCOS差分信號應用一次偏移校準后,與理想角度的偏差。
動態角度誤差
動態角度誤差是對VSIN和VCOS差分信號應用連續偏移和增益校準后,與理想角度的最大偏差。
輸出幅度同步
輸出幅度同步 (k) 定義為在相同磁場角度下,兩個通道的差分幅度之比。當實現幅度同步時,可使用以下等式計算幅度同步:
傳播延遲
傳播延遲是指VSIN和VCOS差分信號在響應磁場激勵時傳播所需的時間。
相位誤差
相位誤差定義為正弦和余弦信號通過放大器時的平均相移。相位誤差會增加信號的相對頻率裕度。儀表放大器的帶寬限制特性如圖12所示,典型特性值可作為一階補償。
正交誤差
正交誤差是由于芯片上正弦和余弦傳感元件未對準至90°而導致的內部相位誤差。
單端輸出電壓低
單端輸出電壓低是VSIN-和VCOS- 引腳斷開或短路且電源電壓低于某個值時的最大電壓。
-
傳感器
+關注
關注
2562文章
52524瀏覽量
763588 -
AMR
+關注
關注
3文章
455瀏覽量
30824 -
ADC
+關注
關注
0文章
202瀏覽量
16845
發布評論請先 登錄
【設計技巧】想搞BLDC電機控制,就必須要懂的角度傳感器
AMR傳感器如何區分北極和南極

TMAG6181-Q1具有集成圈數計數器的高精度模擬AMR角度傳感器數據表

PGA302具有 0-5V 比例輸出的傳感器信號調節器數據表
ADA4571-2雙集成式AMR角度傳感器和信號調理器技術手冊
ADA4558具有LIN接口、非線性校正、溫度補償的橋式傳感器信號調節器IC技術手冊





 工商網監
工商網監
評論