 基于微控制器STM32F105的雙CAN冗余設計方案
基于微控制器STM32F105的雙CAN冗余設計方案
控制器局域網( Contro llerA reaN etwo rk, CAN)是一種多主方式的串行通訊總線。CAN 總線具有較高的位速率, 很強的抗電磁干擾性, 完善的錯誤檢測機制, 在汽車、制造業以及航空工業領域中得到廣泛應用 。由于船舶機艙環境極為惡劣, 且船舶航行過程中維修條件不如陸上, 對CAN 通信的可靠性要求很高, 采取雙CAN 冗余總線提高通信可靠性。本文提出一種基于STM32F105微控制器的雙CAN 冗余設計方案。
1 硬件平臺組成
STM32F105是STM icroe lectron ics公司推出的一款基于ARM Co rtex- M3內核的32位微控制器, 其內核是專門設計于滿足高性能、低功耗、實時應用的嵌入式領域的要求。由于采用Thumb - 2指令集,與ARM7微控制器相比STM32運行速度最多可快35% 且代碼最多節省45% 。較高的主頻和代碼執行效率使系統在進行CAN 總線數據收發的同時仍可運行總線冗余算法。STM32F105微控制器內部集成2路獨立的CAN 控制器, 控制器集成在芯片內部, 避免了總線外擴引入的干擾, 同時簡化了電路設計、降低成本。
系統使用兩條完全獨立的CAN 總線, 兩個CAN 總線收發器和總線控制器, 實現物理層、數據鏈路層的全面冗余。在初始化時兩個控制器被同時激活, 一個作為主CAN, 另一個作為從CAN, 為主控制器的備份。正常運作時, 數據通過主CAN 優先發送; 當主CAN 總線繁忙時, 從CAN 總線分擔部分通信流量; 而當主CAN 總線發生故障時, 數據轉移至從CAN 控制器傳輸, 反之亦然。在任一總線發生故障時,數據都能經由另一條總線傳輸, 而當兩條總線都正常時, 使用兩總線同時傳輸, 增加約1倍的通信帶寬,這樣在保證了通信可靠性的同時提高了實時性。
CAN 總線接口電路設計如圖1所示, 使用T JA1050作為總線收發器, 它完成CAN 控制器與物理總線之間的電平轉換和差動收發。盡管TJA1050本身具備一定的保護能力, 但其與總線接口部分還是采用一定的安全和抗干擾措施; T JA1050的CANH 和CANL與地之間并聯兩只10pF的小電容, 可以濾除總線上的高頻干擾; 另外, 為了增強CAN 總線節點的抗干擾能力, 總線輸入端與地之間分別接入一只瞬態抑制二極管, 當兩輸入與地之間出現瞬變干擾時, 收發器輸入端電壓被鉗位在安全范圍。
為防止總線過壓造成節點損壞, STM32F105內置CAN 控制器的數據收發引腳并不與TJA1050直接相連, 通過ADuM1201磁隔離器實現信號隔離傳輸。與傳統光耦隔離相比, 磁隔離簡化了隔離電路設計, 并且磁隔離芯片的功耗很低, 大約相當于光耦隔離的1 /10。除了將CAN 數據信號隔離外,TJA1050T使用的電源和地也必須與系統完全隔離, 使用5V 隔離輸出的開關電源模塊IB0505LS提供隔離電源。由于CAN 總線數據傳輸率較高, 為了提高信號質量, 網絡拓撲結構應盡量設計成單線結構以避免信號反射, 同時終端連接120歐姆左右的匹配電阻。
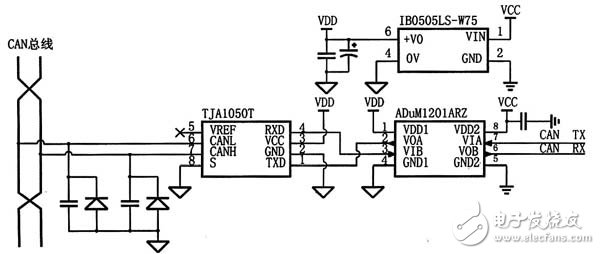
圖1 CAN 接口電路設計
2 軟件設計
CAN 協議規范定義的數據鏈路層和部分物理層并不完整, 雙CAN 冗余應用需要實現總線狀態監控、網絡故障的診斷和標識, 這就要通過添加軟件冗余模塊來實現。冗余模塊在程序主循環中調用, 根據不同總線錯誤狀態執行收發通道切換。CAN 總線錯誤狀態分為3類: 錯誤激活、錯誤認可、總線關閉。總線正常工作時處于錯誤激活狀態,控制器檢測到錯誤后將發送/接收錯誤計數器的值遞增, 當值大于127時進入錯誤認可, 大于255時總線關閉狀態, CAN 總線錯誤檢測模塊通過讀取錯誤狀態寄存器作為總線故障的測試條件, 在錯誤狀態發生改變時調用冗余算法, 執行總線切換操作。
通過實際調試發現, 總線連接斷開且只有1個節點不斷發送報文時產生發送錯誤, 控制器進入錯誤認可狀態, 但不進入總線關閉狀態; 其它錯誤均使錯誤計數器增加, 依次進入錯誤認可狀態、總線關閉狀態, 后兩種狀態表明總線被嚴重干擾, 需要采取相應措施。為簡化控制邏輯設計將錯誤認可和總線關閉合并為總線故障。
冗余算法使用狀態機實現發送模式的切換, 根據不同總線故障選擇發送使用的總線。狀態切換流程圖如圖2所示, 程序首先讀取錯誤狀態寄存器獲得總線錯誤狀態, 判斷當前總線是否處于錯誤激活模式, 若檢測到總線故障程序置相應標志位向其他程序模塊指示錯誤。為提高報文發送效率, 發送程序一次將多個報文寫入發送郵箱由硬件控制自動發送, 在切換總線時, 需先把故障總線發送郵箱中的報文中回讀, 通過備份總線優先發送, 這一機制保證報文不會因總線切換而丟失。控制器向故障總線發送數據域為空的測試報文, 每成功發送1報文, 總線發送錯誤計數器的值遞減, 直至其值小于128總線恢復到錯誤被動狀態; 每隔一定時間冗余程序讀取錯誤狀態寄存器, 檢測故障總線是否恢復正常。
在2總線同時傳輸模式, 發送程序優先寫入總線1郵箱, 當總線1郵箱滿時寫入總線2的郵箱, 由于報文按優先級仲裁發送, 若某一路發送郵箱經常為空, 說明該路總線通信流量較小, 發送程序將較多報文轉由空閑總線發送, 實現報文的負載均衡。
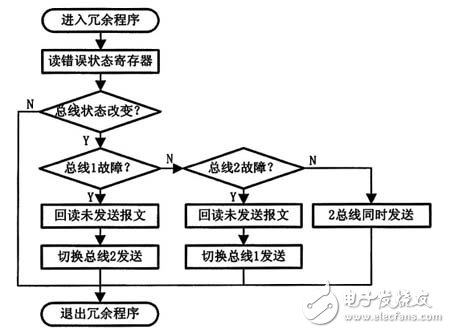
圖2 總線狀態切換流程圖。
3 雙總線冗余的可靠性分析與測試
對雙CAN 冗余系統的可靠性進行定量分析, 引入平均無故障運行時間(M ean T ime To Fa ilure, MTTF)的概念。MTTF描述一個系統從開始工作到發生故障的時間間隔, 也即平均壽命。為簡化分析作如下假設: 每路CAN總線的故障率相同; CAN 總線的損壞屬于物理損壞, 即不可修復的損壞。指數分布可以很好地用來描述電子元器件的壽命, 假設CAN總線的壽命分布服從指數分布, CAN 總線的可靠性模型如圖3所示。
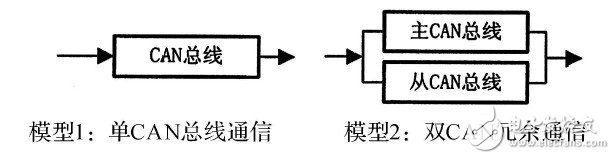
圖3 CAN 總線可靠性模型圖
模型1為單總線的可靠性模型, 因為總線壽命服從指數分布, 根據單一CAN總線無故障運行時間MTTF1 = 1 /λ。模型2為雙CAN總線冗余可靠性模型, 系統由兩條獨立的總線并聯而成, 即只有當這2條總線都失效時系統通信才會失敗, 于是系統的平均壽命MTTF2 = 3 /2。采用雙線冗余設計使CAN 通信的平均無故障時間增加了50%。
雙線CAN 冗余系統的另一關鍵指標是總線切換時間, 它等于檢測錯誤所需時間與處理故障總線未發送報文所需時間之和, 切換時間越短, 總線故障對報文傳輸造成的延遲就越小。檢測錯誤所需時間,即從總線錯誤出現到被冗余程序檢測到所需的時間。以總線斷開故障為例, 發送器每發送一個報文產生一次應答錯誤, 錯誤計數器每次加8, 需連續進行16次發送, 使錯誤計數器值達到128引起總線切換。在位速率125kbps情況下, 發送最長為128位的報文, 若忽略控制器重發間隔時間, 從故障發生到被檢測到的響應時間為:
為避免在總線切換時丟失報文, 冗余算法需回讀故障控制器中未發送報文, 由此產生額外的故障處理時間, 因為每個發送郵箱最多存儲3個報文, 假定位速率125kbps不變, 備份總線發送時即取得仲裁,最長故障處理時間為:
因此總線切換時間為16. 38+ 3. 07= 19. 45m s。
通過實驗測得在125kbps位速率下連續發送不同報文長度的總線切換時間如表1所示:
表1 總線切換時間
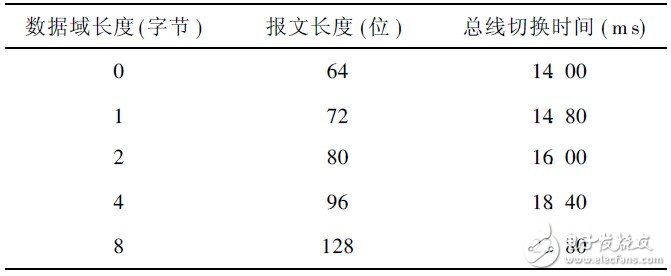
在125kbps位速率下切換時間為22. 80ms, 比理論計算值稍長, 這是由總線切換時運行冗余算法及讀取控制器錯誤寄存器( ESR)所額外消耗的, 但在實際應用中, 發送報文獲取仲裁所需的等待時間遠大于切換時間, 總線故障并不頻繁發生, 冗余切換算法對系統的運行并無顯著影響。
4 結束語
與傳統單片機總線外擴兩片CAN 控制器的冗余方案相比, 本設計充分利用STM32F105微控制器內置的兩路CAN 控制器, 簡化電路設計, 相對降低了成本, 同時雙CAN 冗余通信系統的采用提高了系統整體可靠性。所使用雙總線負載均衡技術, 可以提高總線帶寬, 平衡通信負荷。系統船舶機艙監控系統的圖像和數據信號的傳輸中取得很好的效果。
-
微控制器
+關注
關注
48文章
7908瀏覽量
153721 -
單片機
+關注
關注
6063文章
44925瀏覽量
647092 -
CAN總線
+關注
關注
145文章
1974瀏覽量
132265
發布評論請先 登錄
STM32F405xx和STM32F407xx微控制器數據手冊
SEGGER工具全面支持STM32N6微控制器開發
STM32F407 MCU使用SD NAND?不斷電初始化失效解決方案

TMS320F2802x、TMS320F2802xx微控制器TRM

簡單認識意法半導體STM32C0系列微控制器
STM32WB0系列無線微控制器滿足低功耗藍牙應用需求


CAN總線控制器是什么意思
微控制器的結構和應用
TMS320F28377D-EP雙核Delfino?微控制器數據表





 工商網監
工商網監
評論