 具身智能機器人核心大小腦"感知-決策-執行"全鏈路協同的技術耦合攻堅戰
具身智能機器人核心大小腦"感知-決策-執行"全鏈路協同的技術耦合攻堅戰

2025年成為人形機器人產業化元年,行業已突破早期實驗室研發階段,進入"場景驗證+量產爬坡"新周期,預計2031年具身智能市場規模有望突破萬億元。這一進程的背后,是硬件算力、實時控制、環境適應等底層技術的系統性突破——而如何將這些技術凝聚為可靠的“機器智能”,正成為行競爭的關鍵戰場。
產業升級的“隱形門檻”:高動態場景下的技術耦合挑戰
具身智能機器人的終極目標,是讓機器具備“類人”的感知、決策與執行能力。然而,在工業質檢、家庭服務、戶外巡檢等場景中,機器人需面對三大核心挑戰:
1
多模態感知的實時融合:視覺、語音、力覺等異構數據的同步處理與決策;
2
高精度運動的絕對可靠性:在震動、溫差、電磁干擾等復雜環境下保持亞毫米級控制精度;
3
緊湊形態下的性能平衡:小體積、低功耗與高算力、強散熱的矛盾。
這些挑戰的本質,是硬件架構、操作系統、通信協議的深度耦合能力。傳統方案往往采用“堆疊式”設計,導致算力單元、控制單元、傳感單元相互割裂,難以滿足高動態場景的協同需求。
技術范式重構:從“模塊疊加”到“全域協同”
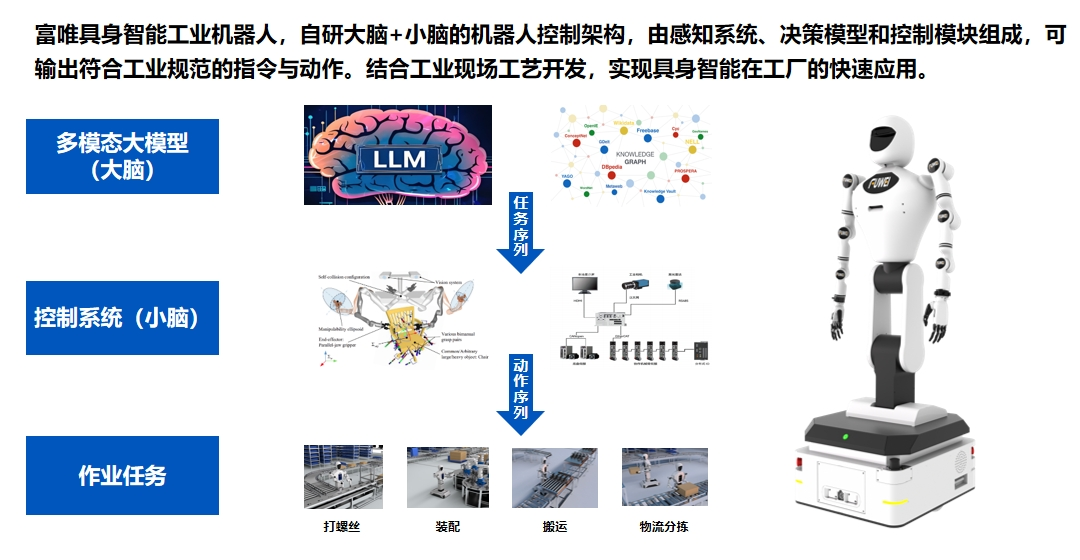
目前,行業內正通過“感知-決策-執行”一體化架構,推動機器人技術范式的根本性變革:
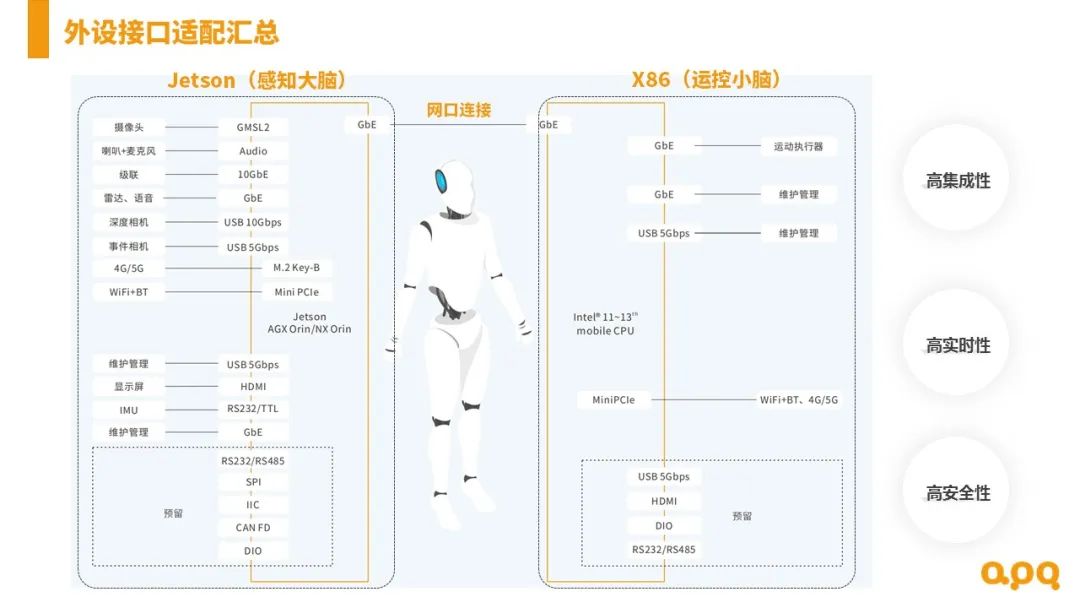
算力與控制的異構融合:采用“AI芯片+實時控制器”雙核架構,兼顧大模型推理與硬實時控制;
時間敏感型通信協議:通過PTP、EtherCAT等協議實現微秒級時間同步,消除多軸協同誤差;
自適應環境界面:嵌入自感知模塊與智能運維系統,實現故障預警與動態降載;
以倉儲物流場景為例,機器人需在每秒處理數十GB點云數據的同時,控制機械臂以毫米級精度抓取貨物——這對系統的全鏈路協同能力提出了近乎苛刻的要求。
產業落地:從“技術可用”到“場景可靠”
當前,具身機器人的應用正從標準化工業場景向非結構化環境加速滲透:
智能制造:工業生產、汽車焊裝、3C電子裝配等場景中,機器人需在強電磁干擾下實現極高運動精度;
智慧醫療:手術輔助機器人依賴多模態感知與亞微秒級控制,確保操作安全;
極限作業:航天作業、災難救援等場景要求機器人在-20℃至60℃寬溫范圍內穩定運行。
這些場景的共性需求是:在極端條件下,仍能保持“感知-決策-執行”鏈路的絕對可靠性。
阿普奇的實踐:以核心技術錨定產業需求
在具身智能機器人領域,阿普奇通過“硬實時控制+高算力融合”的技術路徑,為行業提供了可復用的解決方案:
實時操作系統優化:通過Linux內核實時補丁深度優化,實現毫秒級任務響應與微秒級時間同步,攻克傳統方案指令抖動過大的行業難題,為機器人運動控制賦予“生物級”流暢性。
全域時間同步:基于PTP精密時間協議與EtherCAT主站協議,構建多軸協同的亞微秒級同步網絡,攻克傳統方案200μs時間抖動的性能瓶頸,確保高動態場景下的運動軌跡一致性。
緊湊型高可靠設計:自研散熱系統(風扇+熱管+鰭片)與三防涂層工藝,在同等性能下將控制器體積縮減30%,支持-20℃~60℃寬溫運行,實現高性能與低功耗的完美平衡,無懼粉塵、震動、電磁干擾等工業級嚴苛環境挑戰。
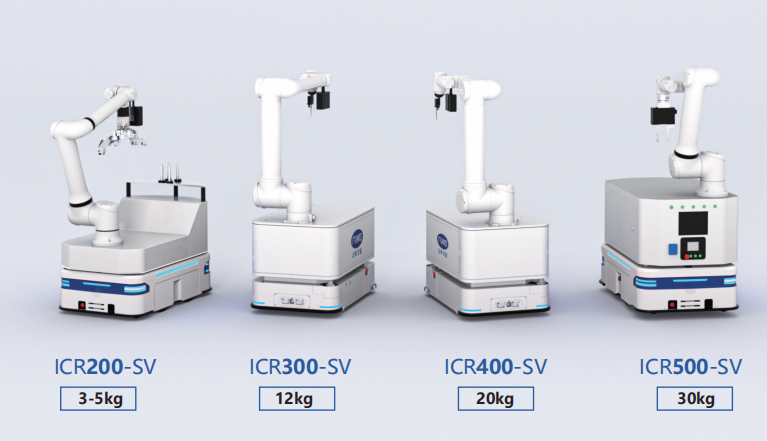
阿普奇產品矩陣(如KiWiBot系列、AK系列、TAC系列)已逐步應用于人形機器人、工業機器人、服務機器人、機械臂等場景,并通過模塊化架構與智能運維套件(小助手SDK),顯著降低客戶集成與維護成本。
具身智能機器人的發展,本質是一場“技術-場景-成本”的三角博弈。當行業跨越單點創新的階段后,唯有通過硬件、算法、系統的深度協同,才能實現從“功能機”到“智能體”的質變。阿普奇以實時控制、高算力融合、工業級可靠性為核心錨點,不僅為當下場景提供了高性價比的解決方案,更通過開放生態與持續迭代,助力行業加速邁向“全域智能”的新紀元。
讓工業更可靠
成就生活之美
審核編輯 黃宇
-
智能機器人
+關注
關注
17文章
899瀏覽量
84509 -
ethercat
+關注
關注
19文章
1108瀏覽量
40002
發布評論請先 登錄
艾摩星機器人完成首個具身智能產品全鏈路功能驗證
80 TOPS 算力、大小腦超級異構!地瓜機器人發布 RDK S100 算控一體化機器人開發套件

人形機器人為什么要定制? ——揭秘工業場景的&quot;千面需求&quot;
從感知到運控:具身智能機器人控制器的雙腦協同設計與場景適配





 工商網監
工商網監
評論