 機器視覺運動控制一體機在龍門跟隨點膠的解決方案
機器視覺運動控制一體機在龍門跟隨點膠的解決方案

市場應用背景
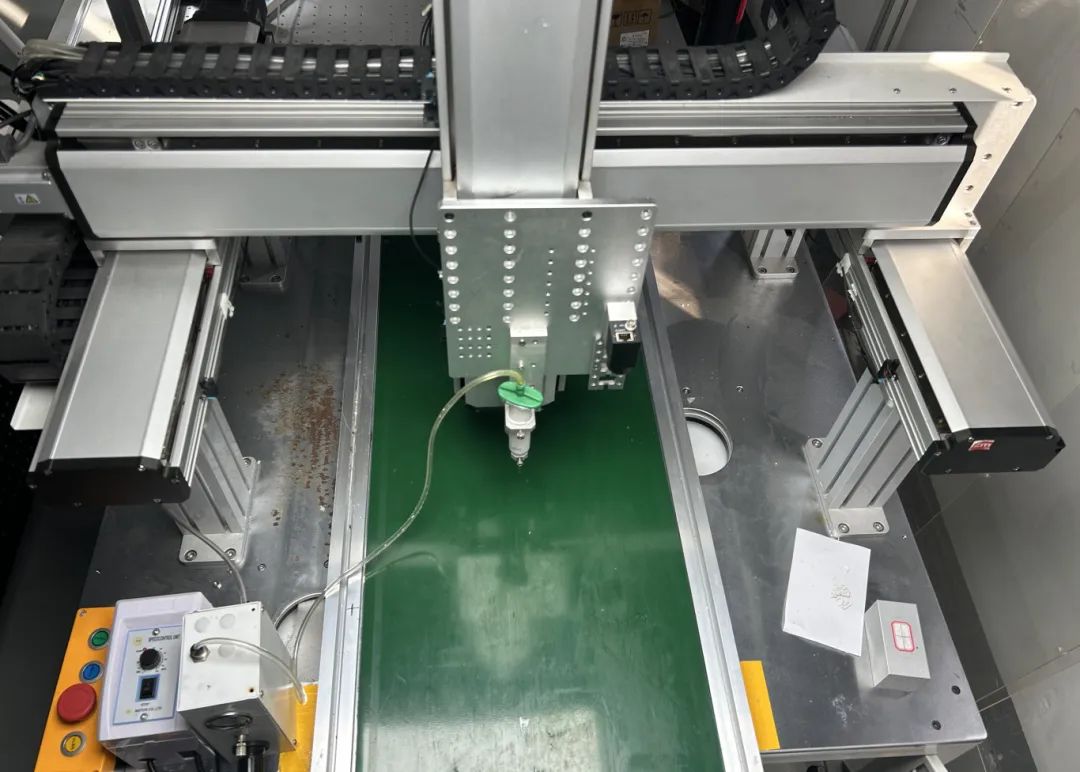
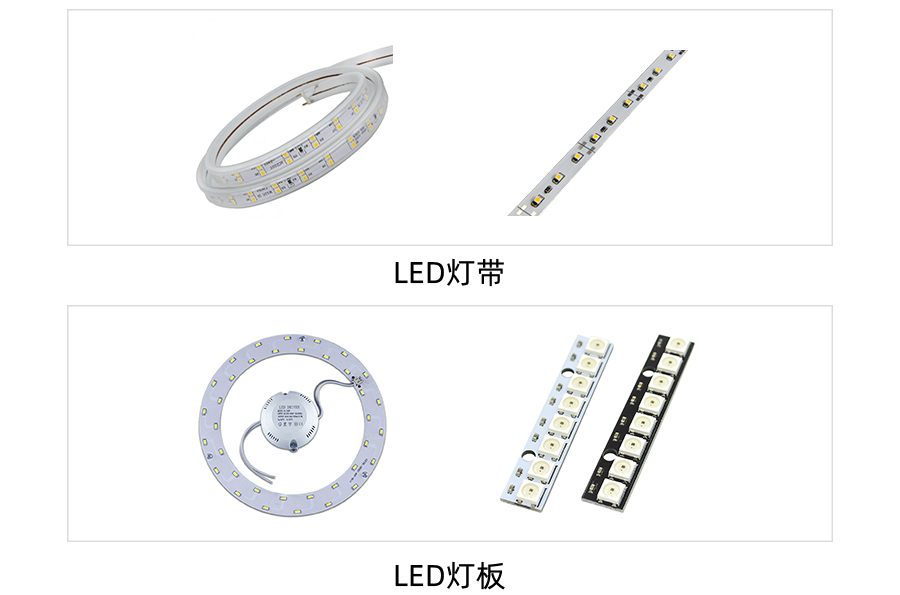
在照明、汽車、工業電氣等領域,設備平面運動性能至關重要,尤其體現在大跨度操作、大負載承載、極致平滑運動以及最小化軸間耦合干擾等方面。這些特性對于大尺寸和長條形產品的點膠工藝尤為關鍵,同時也滿足了追求高效生產客戶的嚴苛需求。
市面上常見的傳統點膠機方案:
傳統點膠機的單龍門平臺受限于其結構設計,難以兼顧大跨度運動和高精度定位,在應對大尺寸產品或高精度點膠需求時顯得捉襟見肘。
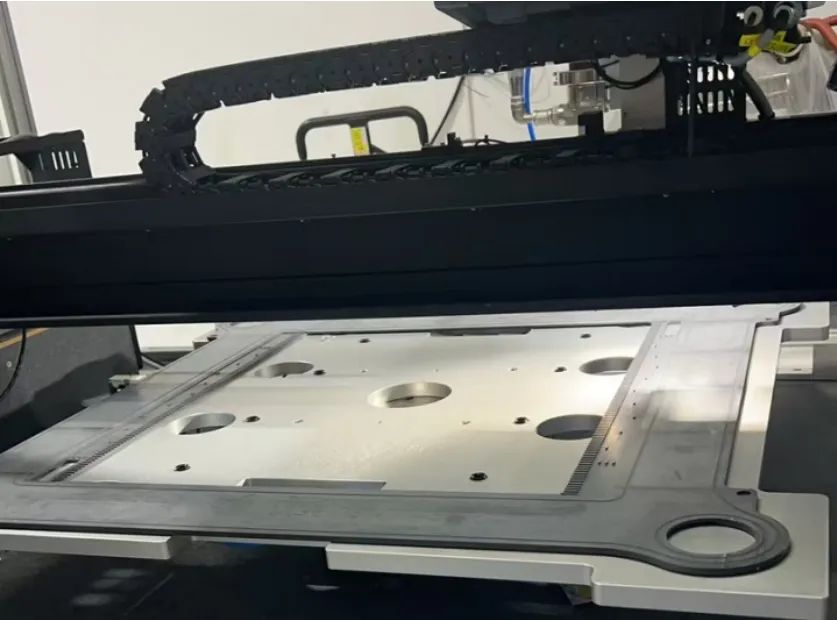
正運動總線雙龍門視覺點膠機解決方案:
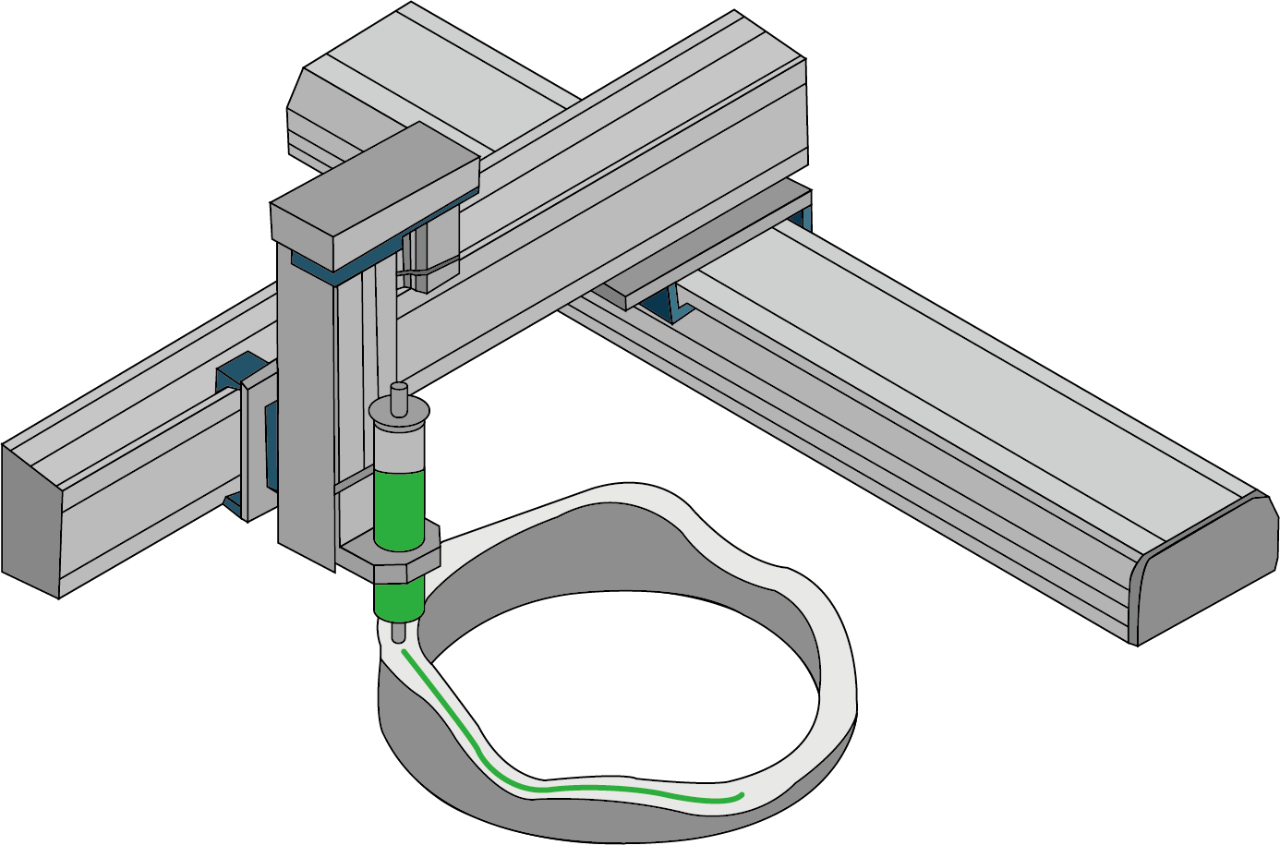
龍門結構通常由兩個電機及其配套機械裝置構成。主軸與從軸通過精密協同,確保運動任務的高效執行。尤其適用于高精度加工和大規模生產場景。雙電機的配置增強了系統的冗余性,即使單電機出現故障,設備仍能維持基本運行,提高了系統的可靠性。
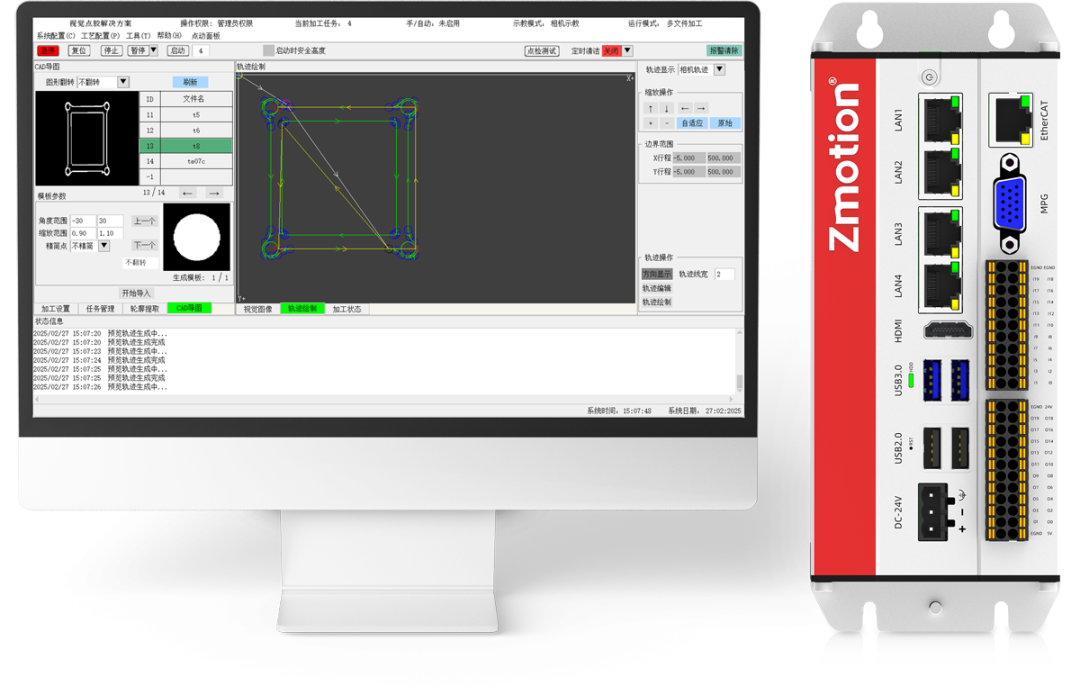
正運動總線雙龍門視覺點膠機采用總線伺服控制,搭配高精度視覺定位系統,實現精準定位與高效點膠。設備通過視覺系統精準識別定位點,并融合CAD導圖功能智能生成點膠路徑,確保點膠作業精度高、一致性強。
龍門式點膠機憑借其超大工作臺和廣闊的有效行程,能夠輕松應對多樣化的工藝設計挑戰。因此,其配備的運動控制必須具備以下核心優勢:
●快速響應與整定:迅速響應指令并穩定運行,確保高效生產節奏。
●極低誤差范圍:將運動誤差控制在極低范圍內,保證點膠精度和一致性。
●超高運動精度:實現精準定位和軌跡控制,滿足復雜點膠工藝需求。
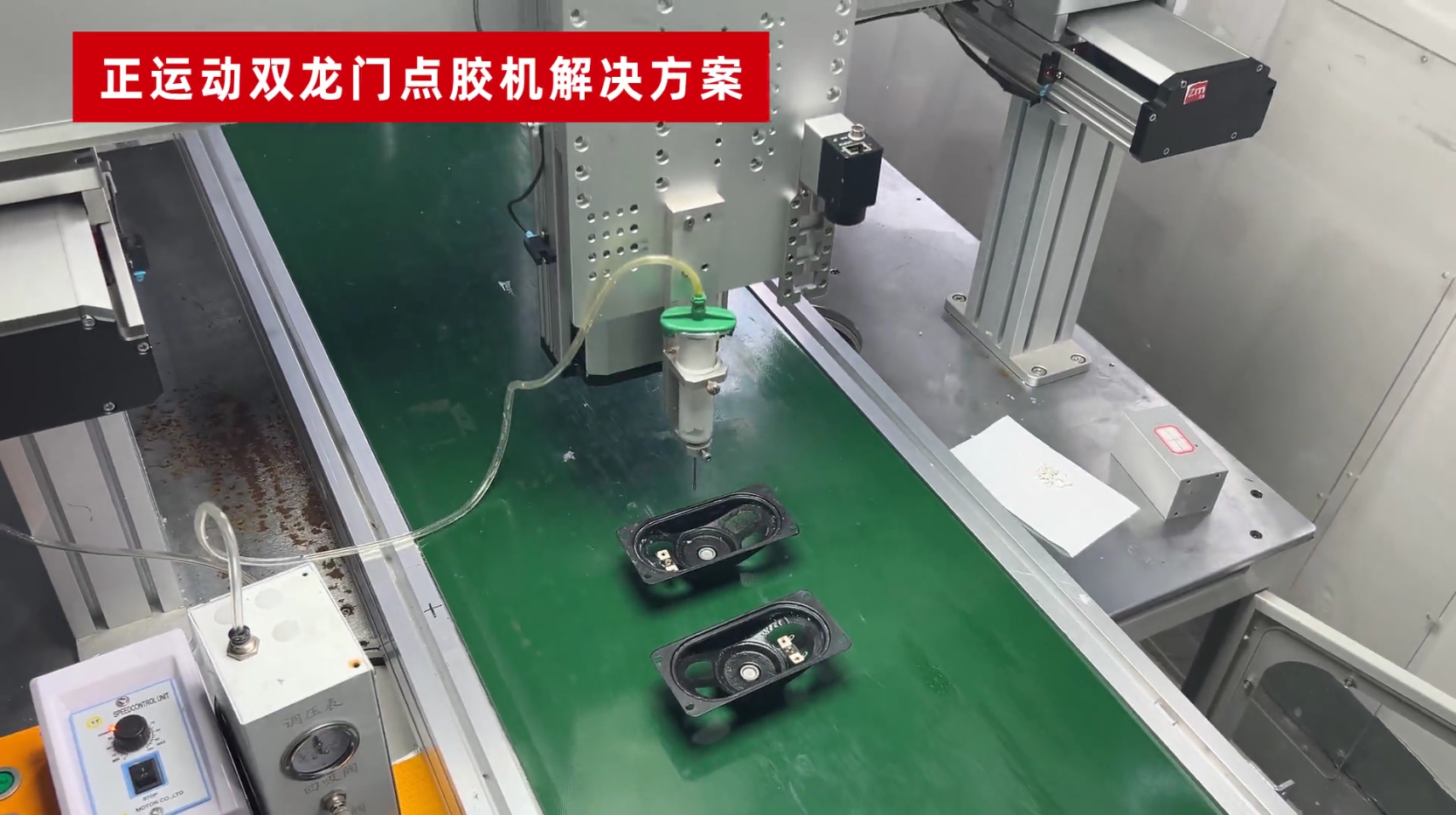
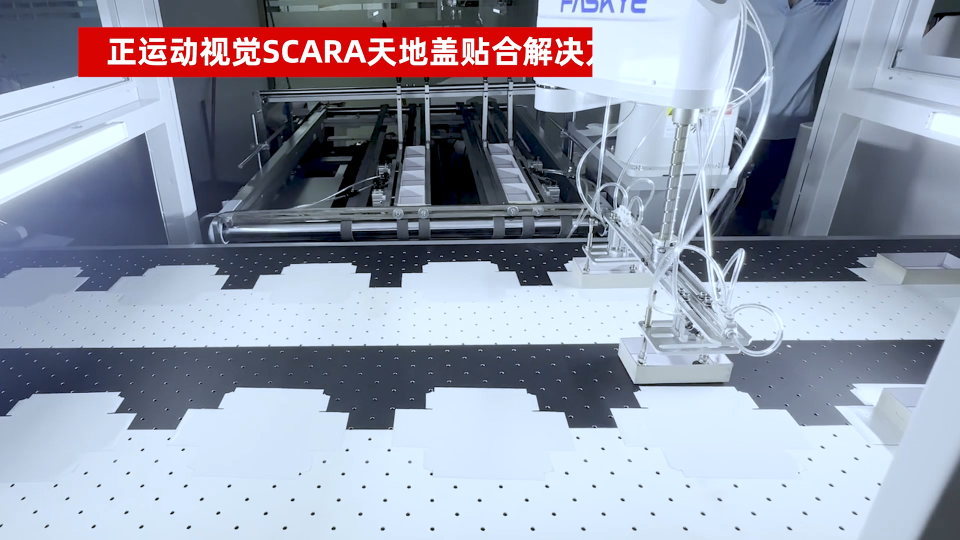
01 機器視覺運動控制一體機在雙龍門點膠的解決方案
雙龍門點膠機運行視頻可點擊→“機器視覺運動控制一體機在龍門跟隨點膠的解決方案”查看。
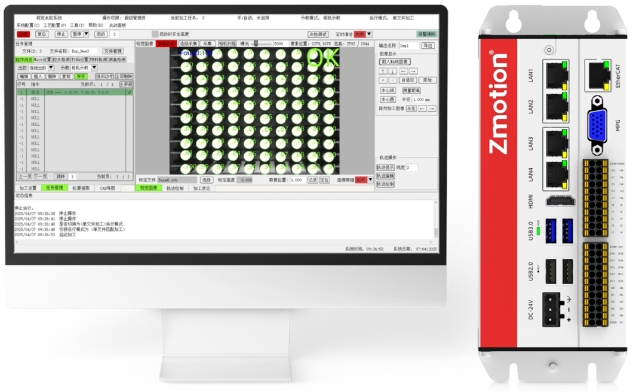
正運動雙龍門點膠解決方案設計
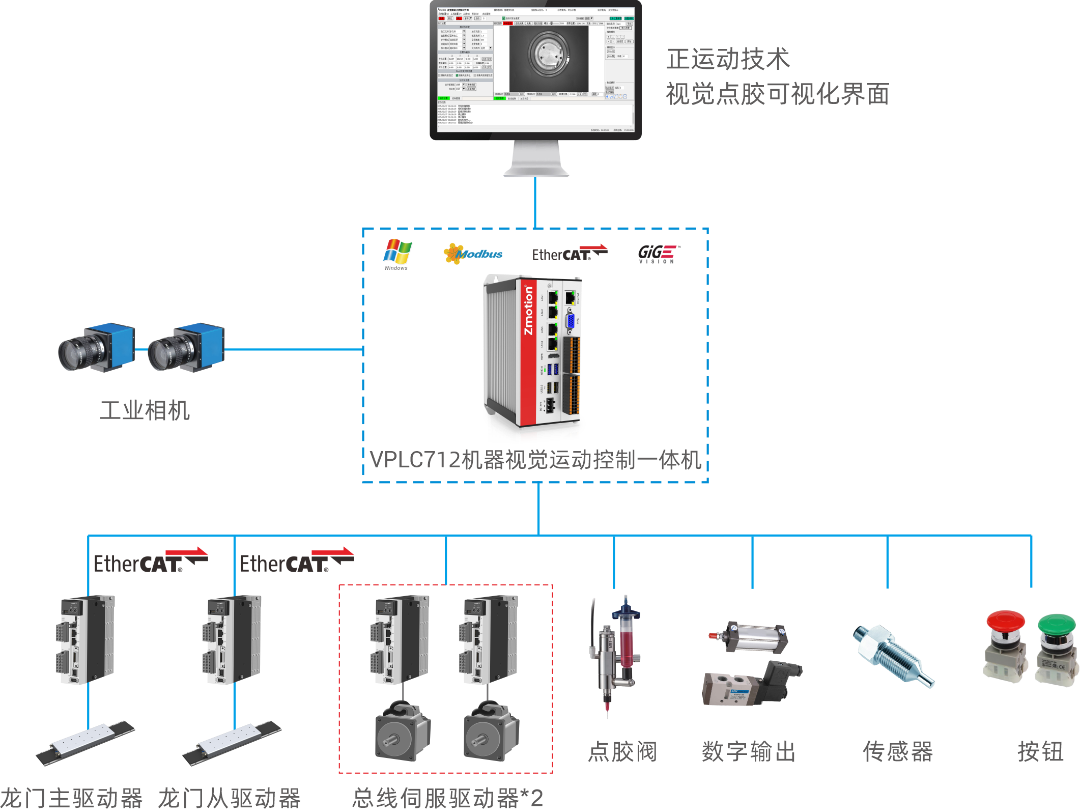
24DI:接原點、限位等傳感器,以及開關信號器等
12DO:高速輸出口接工業相機的硬觸發輸入、點膠閥和氣閥等
EtherCAT接口:接EtherCAT總線驅動器,控制龍門主從軸以及其他軸運動
EtherNET接口:千兆網口,接Gige面陣相機,實現視覺定位應用
運動控制與機器視覺實現過程
| 機器視覺
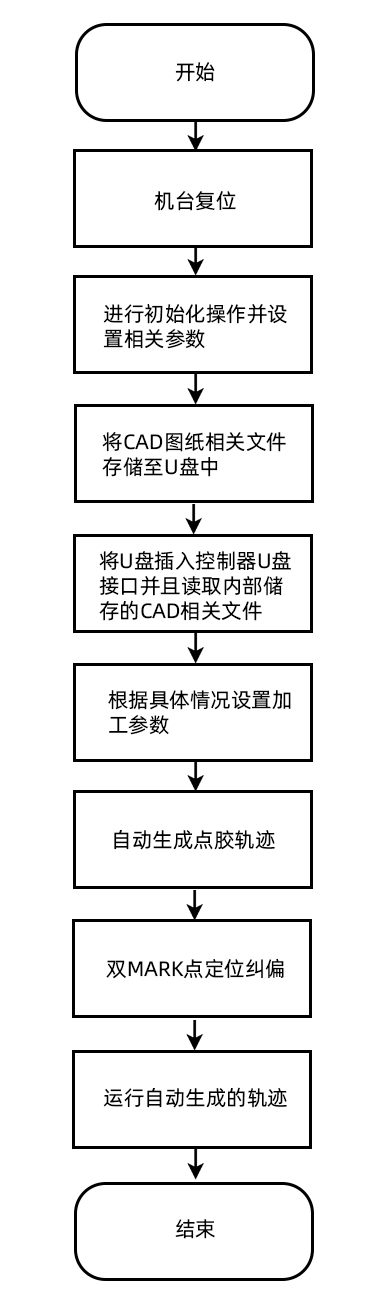
(1)平臺回零與Mark點校準
設備初始化時,平臺自動回零后并驅動雙Mark點至視覺系統視野中心,通過工業相機精準捕捉Mark點圖像,記錄其在平臺坐標系中的絕對坐標,建立全局基準。
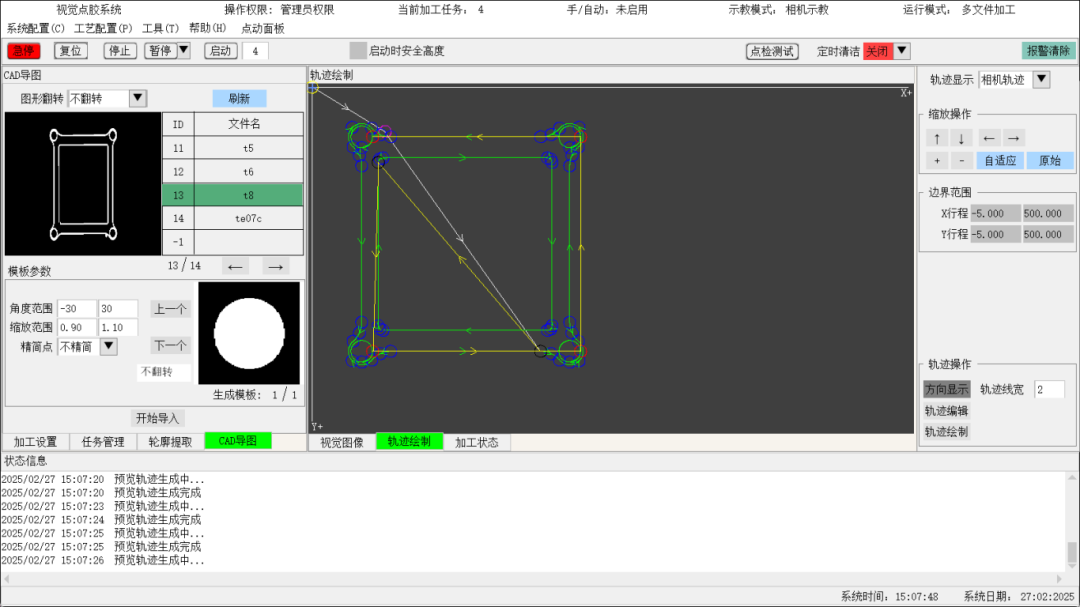
(2)坐標映射與路徑規劃
基于校準坐標數據,系統自動計算點膠位點與Mark點的相對坐標關系,結合CAD導圖生成的點膠路徑參數,構建“Mark點-產品-點膠路徑”的空間映射模型,確保點膠位置的加工精度。
(3)精準補償與高效定位
在實際點膠作業過程中,視覺系統通過采集Mark點的圖像信息,并運用高效的圖像處理算法,快速計算出Mark點在當前平臺坐標系中的精確位置。系統基于預先設定的相對坐標參數,自動調整點膠頭的空間位置,從而精準完成點膠操作。由于Mark點作為固定參考基準,系統無需對每個產品進行重復的圖像采集和定位計算,這一設計顯著提升了生產效率和作業精度。
| 運動控制
(1)多段軌跡插補技術
基于高精度運動控制器實現多段線段的連續無縫插補,通過自適應速度規劃生成平滑路徑軌跡。該技術有效消除加減速階段的膠量波動,解決傳統點膠工藝中常見的膠水堆積和軌跡斷點缺陷,保障復雜輪廓的成型一致性。
(2)Z軸補償功能
集成非接觸式激光測高模塊,采用“先探后膠”的閉環控制邏輯:
● 點膠頭運動前,激光傳感器對路徑進行亞毫米級三維掃描
● 實時反饋基板高度數據至運動控制系統
● 通過補償算法調整Z軸伺服模組,使針嘴與工件保持恒定間距
該方案可自適應處理曲面工件或來料裝配誤差,確保膠線截面均勻性。
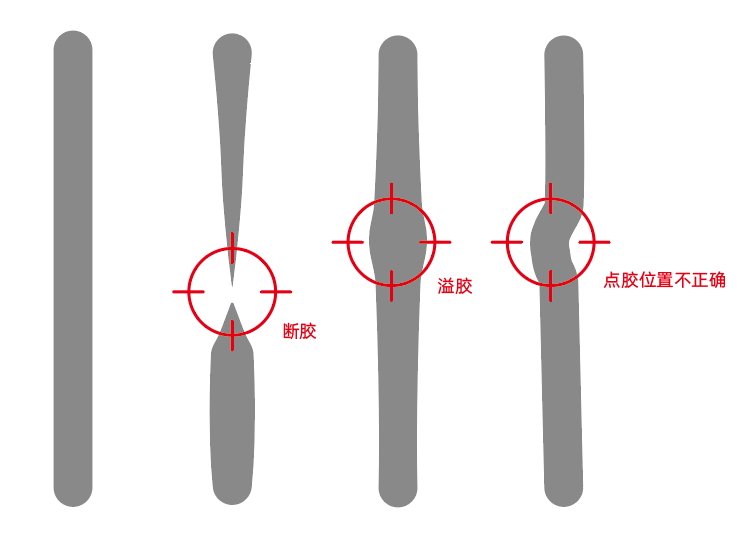
(3)精準的開關膠控制
精確調節點膠閥開閉時機與針頭運動軌跡,通過開膠延時、關膠延時、提前關膠及退槍高度等參數優化,有效解決拉絲、堆膠等工藝缺陷,確保膠量精準可控,適應多樣化點膠需求。
雙龍門點膠機工藝流程
方案應用優勢
膠量控制精準:實時調整出膠量,確保膠水精確分配,誤差控制在極小范圍內,滿足高精度點膠需求
多文件自動識別與匹配:智能識別不同產品文件,自動匹配對應加工模板,實現快速切換,提升生產效率,減少人工操作失誤
數據管理與工藝優化:支持加工和檢測過程中的圖像數據保存,以及點膠參數的導入導出功能,方便工藝優化和重復使用,建立完善的工藝數據庫
多樣化出膠工藝:提供連續出膠、打點噴膠、螺桿推膠等多種出膠模式,滿足不同點膠工藝需求,確保膠水分配的多樣性和適應性,適用于各種復雜場景
高精度視覺定位:配備高分辨率工業相機,結合便捷的視覺標定和模板創建功能,實現亞像素級視覺定位與檢測,確保點膠位置高精度
靈活便捷的示教模式:提供手動對點、視覺示教、CAD導圖編輯和軌跡圖像繪制等多種示教方式,操作簡單直觀,降低學習成本,滿足不同用戶的操作習慣
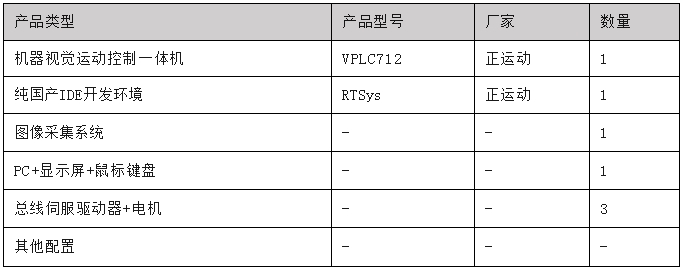
解決方案硬件配置
02 高集成機器視覺運動控制一體機VPLC712
正運動技術VPLC712機器視覺運動控制一體機是一款基于x86架構的EtherCAT總線視覺運動控制器,采用一體化設計,將實時機器視覺、運動控制、IO和監控集成于一臺多核控制器上,實現多任務并行實時處理自動化設備任務,通過共享內存機制,將PC部分硬件資源通過MotionRT7進行配置,實現核內高速交互,驅動執行器進行對應操作,完成設備整體的控制。
VPLC系列機器視覺運動控制一體機的安裝與拆卸過程便捷,占地空間小,還能與其它控制單元部件(如伺服驅動器、傳感器、編碼器、控制閥等)無縫集成,提供一個完整端到端的視覺運動控制解決方案。
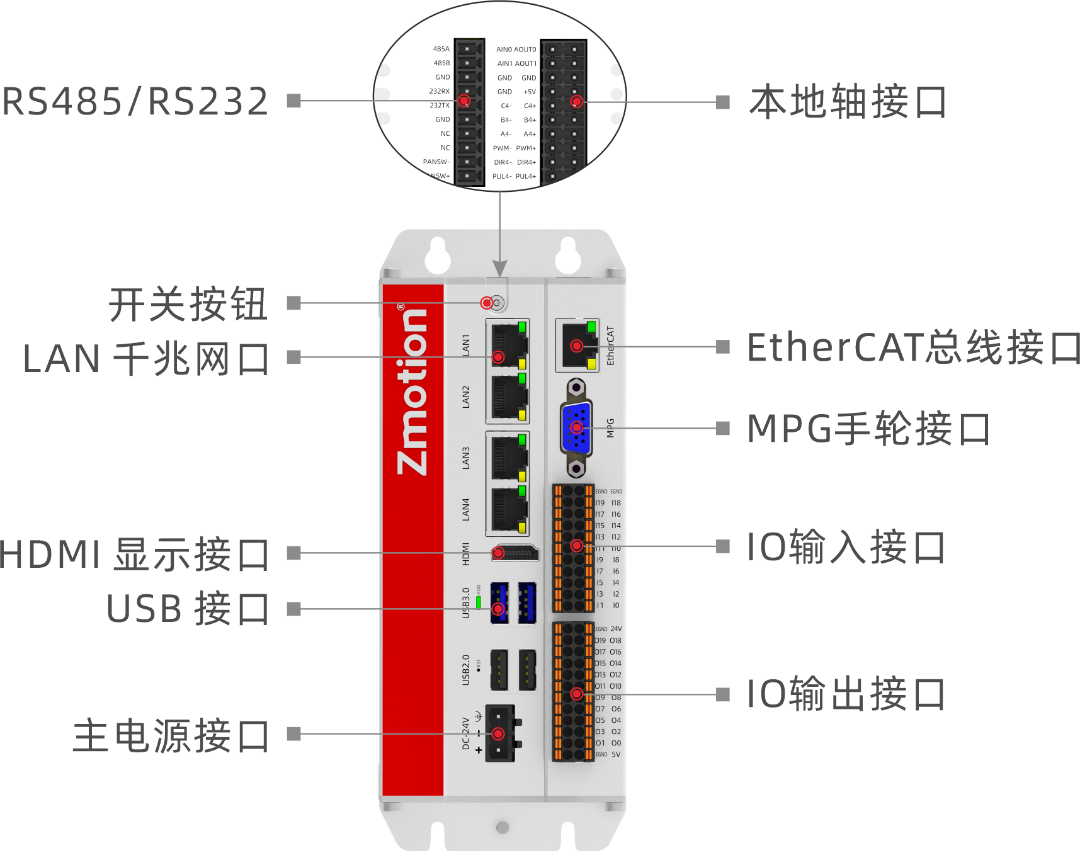
VPLC712機器視覺運動控制一體機,本身最多支持64軸,EtherCAT最小通訊周期可達到500us;板載20數字輸入,20數字輸出以及4路高速鎖存輸入;板載2路本地差分脈沖軸、2路AD和2路DA。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
449瀏覽量
25249 -
機器視覺
+關注
關注
163文章
4532瀏覽量
122797 -
運動控制
+關注
關注
4文章
655瀏覽量
33520
發布評論請先 登錄










 工商網監
工商網監
評論