") 【CW32模塊使用】16路舵機(jī)驅(qū)動(dòng)模塊
【CW32模塊使用】16路舵機(jī)驅(qū)動(dòng)模塊
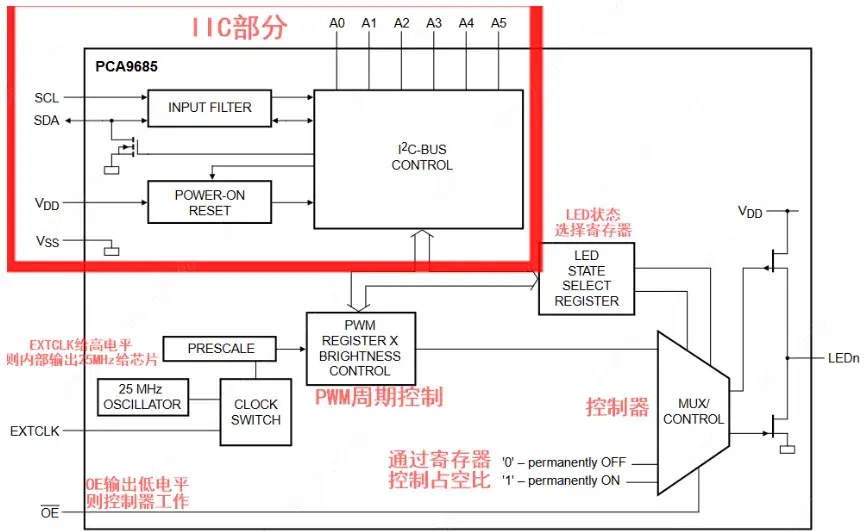
當(dāng)你在一個(gè)項(xiàng)目中碰到了微控制器芯片的PWM輸出引腳不夠用的情況,那么這款PCA968516路舵機(jī)就能很快幫助您解決這個(gè)問題了。只要你的主控芯片具備了I2C通信,就能夠讓主控芯片和PCA9685通信,實(shí)現(xiàn)多個(gè)舵機(jī)的同時(shí)控制了。PCA9685 16路舵機(jī)是一個(gè)采用I2C通信,內(nèi)置了PWM驅(qū)動(dòng)器和一個(gè)時(shí)鐘,這個(gè)意味著,這將和TLCG940系列有很大不同,你不需要不斷發(fā)送信號(hào)占用你的單片機(jī)。它是5V的兼容,這意味你還可以用3.3V單片機(jī)控制并且安全地驅(qū)動(dòng)到6V輸出(當(dāng)你想要控制白色或藍(lán)色指示燈用3.4+正電壓也是可以的)。地址選擇引腳使你可以把62個(gè)驅(qū)動(dòng)板掛在單個(gè)l2C總線上,總共有992路PWM輸出,那將是非常龐大的資源,約1.6Khz可調(diào)頻PWM輸出,為步進(jìn)電機(jī)準(zhǔn)備輸出12位分辨率,可配置的推拉輸出或開路輸出,輸出使能引腳能夠快速禁用所有輸出。
一、模塊來源
模塊實(shí)物展示:
資料鏈接:https://pan.baidu.com/s/1FjoAuJm387bxaZxS6g9HEg
資料提取碼:8888
二、規(guī)格參數(shù)
輸入電壓:3.3V~5V
額定電流:15mA
控制方式:IIC
尺寸:21(長)*21(寬)[單位:mm]
以上信息見廠家資料文件
三、移植過程
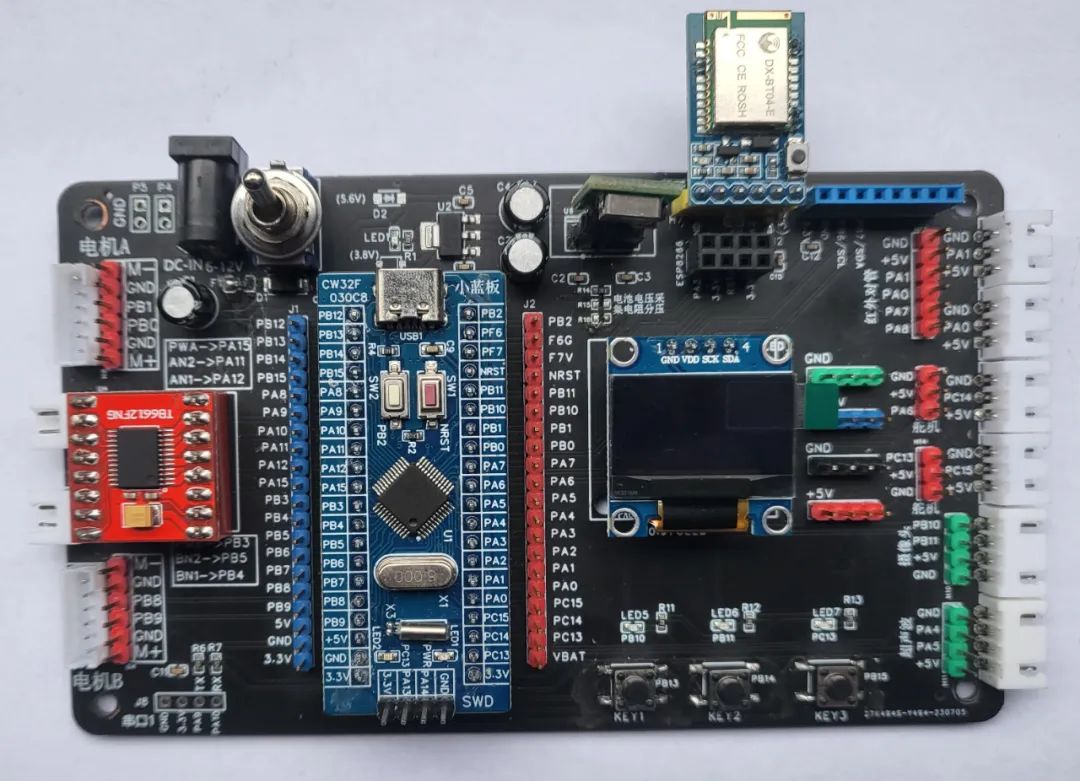
我們的目標(biāo)是將例程移植至CW32F030C8T6開發(fā)板上【實(shí)現(xiàn)無線的數(shù)據(jù)傳輸?shù)墓δ堋俊J紫纫@取資料,查看數(shù)據(jù)手冊(cè)應(yīng)如何實(shí)現(xiàn)讀取數(shù)據(jù),再移植至我們的工程。
3.1查看資料
IIC器件地址
PCA9685 是一個(gè)I2C 從設(shè)備,有個(gè)設(shè)備ID,或者叫從 地址。從地址是如下確定的:
Board 0: Address = 0×40 Offset = binary 00000 (默認(rèn))
Board 1: Address = 0×41 Offset = binary 00001 (A0接上拉)
Board 2: Address = 0×42 Offset = binary 00010 (接上A1上拉)
Board 3: Address = 0×43 Offset = binary 00011 (A0和A1上拉)
Board 4: Address = 0×44 Offset = binary 00100 (A2上拉)
以此類推;
PCA9685的I2C總線從地址如下圖所示。為了節(jié)約電力,硬件可選地址引腳上沒有內(nèi)部上拉電阻,它們必須被拉高或拉低。但是我們使用的是模塊,而模塊上已經(jīng)為我們接好了上拉電阻。
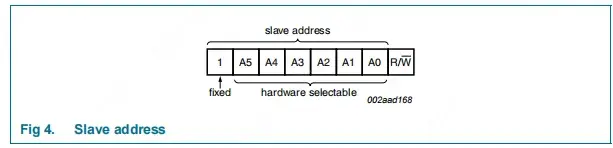
地址字節(jié)的最后一位定義要執(zhí)行的操作。當(dāng)設(shè)置為邏輯1時(shí),將選擇讀操作,而邏輯0則選擇寫操作。 在原理圖中,地址線全部接0,所以slave address是0x40。對(duì)應(yīng)Fig 4上的位置,則為:

則IIC地址是 0x80 ,寫入時(shí)是0x80,讀取時(shí)是0x81。
設(shè)置PWM頻率
舵機(jī)控制所需的 PWM 周期為20 ms. 在用 PCA9685 作為多舵機(jī)控制器時(shí),需要將 其 PWM 輸出周期設(shè)定為20 ms,即PWM 波的頻率設(shè)定為50 Hz,PCA9685 輸出頻率與振蕩器有關(guān),頻率的設(shè)置值refresh_rate見下面的公式;

其中,EXTCLK是PCA9685的內(nèi)部時(shí)鐘頻率為25Mhz;prescale是要設(shè)置的頻率,我們?cè)O(shè)置為50Hz;
refresh_rate = 25,000,000 /( 4096 * ( 50 + 1 ))
refresh_rate = 25,000,000 / 4096 / (50 + 1)
refresh_rate = 6,103.52 / (50 + 1)
refresh_rate = 6,103.52 / 51
refresh_rate = 119.68
所以我們需要設(shè)置的值是119.68,取整數(shù)就是120。
需要注意的是,頻率的更改只能在 PCA9685 芯片處于休眠狀態(tài)下進(jìn)行。
以下加粗字體是數(shù)據(jù)手冊(cè)內(nèi)容:
要使用EXTCLK引腳,該位必須按以下順序設(shè)置:
在mode1中設(shè)置SLEEP位。這就關(guān)閉了內(nèi)部振蕩器,使芯片處于休眠狀態(tài)。
將邏輯1寫入MODE1中的SLEEP和EXTCLK位。這樣就轉(zhuǎn)換完成了。外部時(shí)鐘可以在切換期間處于活動(dòng)狀態(tài),因?yàn)樵O(shè)置了SLEEP位。
這個(gè)位是一個(gè)“粘性位”,也就是說,它不能通過寫入邏輯0來清除。EXTCLK位只能通過電源循環(huán)或軟件重置來清除。 占空比或者脈沖寬度的設(shè)定
每個(gè)PWM引腳輸出的開啟時(shí)間和PWM的占空比可以通過LEDn_ON和LEDn_OFF寄存器獨(dú)立控制。
每個(gè)PWM引腳輸出將有兩個(gè)12位寄存器。這些寄存器將由用戶編程。兩個(gè)寄存器都將保存從0到4095的值。一個(gè)12位寄存器將保存ON時(shí)間的值,另一個(gè)12位寄存器將保存OFF時(shí)間的值。將ON和OFF時(shí)間與12位計(jì)數(shù)器的值進(jìn)行比較,該計(jì)數(shù)器將從0000h持續(xù)運(yùn)行到0FFFh(0到4095十進(jìn)制)。
ON時(shí)間是可編程的,它是PWM輸出ON的時(shí)間,OFF時(shí)間也是可編程的,它是PWM輸出OFF的時(shí)間。這樣相移就完全可編程了。相移的分辨率為目標(biāo)頻率的1 / 4096。表7列出了這些寄存器。
以下用一個(gè)例子說明如何計(jì)算要加載到這些寄存器中的值。
(假設(shè)使用LED0輸出,(延時(shí)時(shí)間)+ (PWM占空比)<=100%)
延遲時(shí)間 = 10%;PWM占空比= 20% (LEDON電平= 20%;LEDOFF時(shí)間= 80%)。延遲時(shí)間= 10% = 4096 * 0.1 = 409.6 ~ 410,計(jì)數(shù)= 410(十進(jìn)制) = 19Ah(十六進(jìn)制)
因?yàn)橛?jì)數(shù)器從0開始,到4095結(jié)束,我們將減去1,所以延遲時(shí)間 = 199h 個(gè)數(shù)。
LED0_ON_H = 1h;LED0_ON_L = 99h (LED開始打開后,這個(gè)延遲計(jì)數(shù)到409)
LED開機(jī)時(shí)間= 20% = 819.2 ~ 819次
LED關(guān)閉時(shí)間= 4CCh(十進(jìn)制410 + 819-1 = 1228)
LED0_OFF_H = 4h;LED0_OFF_L = CCh(此計(jì)數(shù)到1228后LED開始關(guān)閉)
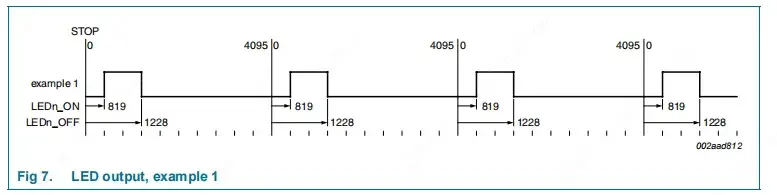
整個(gè)周期為4095, LED_ON 和 LED_OFF 2個(gè)的設(shè)定值確定脈寬,在后面的代碼里,LED_ON 設(shè)為0, LED_OFF就是脈寬了。 這里都用2位字節(jié)來表示。
相關(guān)地址表
// 相關(guān)地址表 // 這里只截圖了需要的地址,分別是: #define PCA_Addr 0x80 //IIC地址 #define PCA_Model 0x00 #define LED0_ON_L 0x06 #define LED0_ON_H 0x07 #define LED0_OFF_L 0x08 #define LED0_OFF_H 0x09 #define PCA_Pre 0xFE //配置頻率地址

3.2引腳選擇
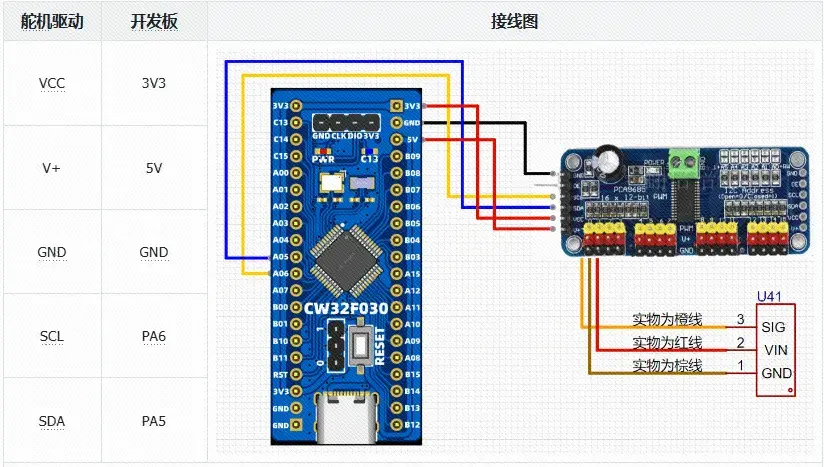
模塊接線圖
3.3移植至工程
移植步驟中的導(dǎo)入.c和.h文件與【CW32模塊使用】DHT11溫濕度傳感器相同,只是將.c和.h文件更改為bsp_pca9685.c與bsp_pca9685.h。這里不再過多講述,移植完成后面修改相關(guān)代碼。
在文件bsp_pca9685.c中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-25 LCKFB-LP first version */ #include "bsp_pca9685.h" #include "stdio.h" #include /****************************************************************** * 函 數(shù) 名 稱:PCA9685_GPIO_Init * 函 數(shù) 說 明:PCA9685的引腳初始化 * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void PCA9685_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結(jié)構(gòu)體 RCC_PCA9685_GPIO_ENABLE(); // 使能GPIO時(shí)鐘 GPIO_InitStruct.Pins = GPIO_SDA|GPIO_SCL; // GPIO引腳 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 開漏輸出 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高 GPIO_Init(PORT_PCA9685, &GPIO_InitStruct); // 初始化 } /****************************************************************** * 函 數(shù) 名 稱:IIC_Start * 函 數(shù) 說 明:IIC起始時(shí)序 * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void IIC_Start(void) { SDA_OUT(); SDA(1); delay_us(5); SCL(1); delay_us(5); SDA(0); delay_us(5); SCL(0); delay_us(5); } /****************************************************************** * 函 數(shù) 名 稱:IIC_Stop * 函 數(shù) 說 明:IIC停止信號(hào) * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void IIC_Stop(void) { SDA_OUT(); SCL(0); SDA(0); SCL(1); delay_us(5); SDA(1); delay_us(5); } /****************************************************************** * 函 數(shù) 名 稱:IIC_Send_Ack * 函 數(shù) 說 明:主機(jī)發(fā)送應(yīng)答或者非應(yīng)答信號(hào) * 函 數(shù) 形 參:0發(fā)送應(yīng)答 1發(fā)送非應(yīng)答 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void IIC_Send_Ack(unsigned char ack) { SDA_OUT(); SCL(0); SDA(0); delay_us(5); if(!ack) SDA(0); else SDA(1); SCL(1); delay_us(5); SCL(0); SDA(1); } /****************************************************************** * 函 數(shù) 名 稱:I2C_WaitAck * 函 數(shù) 說 明:等待從機(jī)應(yīng)答 * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:0有應(yīng)答 1超時(shí)無應(yīng)答 * 作 者:LC * 備 注:無 ******************************************************************/ unsigned char I2C_WaitAck(void) { char ack = 0; unsigned char ack_flag = 10; SCL(0); SDA(1); SDA_IN(); delay_us(5); SCL(1); delay_us(5); while( (SDA_GET()==1) && ( ack_flag ) ) { ack_flag--; delay_us(5); } if( ack_flag <= 0 ) { IIC_Stop(); return 1; } else { SCL(0); SDA_OUT(); } return ack; } /****************************************************************** * 函 數(shù) 名 稱:Send_Byte * 函 數(shù) 說 明:寫入一個(gè)字節(jié) * 函 數(shù) 形 參:dat要寫人的數(shù)據(jù) * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void Send_Byte(uint8_t dat) { int i = 0; SDA_OUT(); SCL(0);//拉低時(shí)鐘開始數(shù)據(jù)傳輸 for( i = 0; i < 8; i++ ) { SDA( (dat & 0x80) >> 7 ); delay_us(1); SCL(1); delay_us(5); SCL(0); delay_us(5); dat>8); I2C_WaitAck(); Send_Byte(off&0xFF); I2C_WaitAck(); Send_Byte(off>>8); I2C_WaitAck(); IIC_Stop(); } /****************************************************************** * 函 數(shù) 名 稱:PCA9685_setFreq * 函 數(shù) 說 明:設(shè)置PCA9685的輸出頻率 * 函 數(shù) 形 參:freq * 函 數(shù) 返 回:無 * 作 者:LC * 備 注: floor語法: FLOOR(number, significance) Number必需。要舍入的數(shù)值。 Significance必需。要舍入到的倍數(shù)。 說明 將參數(shù) number 向下舍入(沿絕對(duì)值減小的方向)為最接近的 significance 的倍數(shù)。 如果任一參數(shù)為非數(shù)值型,則 FLOOR 將返回錯(cuò)誤值 #VALUE!。 如果 number 的符號(hào)為正,且 significance 的符號(hào)為負(fù),則 FLOOR 將返回錯(cuò)誤值 #NUM! 示例 公式 說明 結(jié)果 FLOOR(3.7,2) 將 3.7 沿絕對(duì)值減小的方向向下舍入,使其等于最接近的 2 的倍數(shù) 2 FLOOR(-2.5, -2) 將 -2.5 沿絕對(duì)值減小的方向向下舍入,使其等于最接近的 -2 的倍數(shù) -2 ******************************************************************/ void PCA9685_setFreq(float freq) { uint8_t prescale,oldmode,newmode; double prescaleval; // freq *= 0.9; // Correct for overshoot in the frequency setting (see issue #11). // PCA9685的內(nèi)部時(shí)鐘頻率是25Mhz // 公式: presale_Volue = round( 25000000/(4096 * update_rate) ) - 1 // round = floor(); floor是數(shù)學(xué)函數(shù),需要導(dǎo)入 math.h 文件 // update_rate = freq; prescaleval = 25000000; prescaleval /= 4096; prescaleval /= freq; prescaleval -= 1; prescale = floor(prescaleval+0.5f); //返回MODE1地址上的內(nèi)容(保護(hù)其他內(nèi)容) oldmode = PCA9685_Read(PCA_Model); //在MODE1中設(shè)置SLEEP位 newmode = (oldmode&0x7F)|0x10; //將更改的MODE1的值寫入MODE1地址,使芯片睡眠 PCA9685_Write(PCA_Model,newmode); //寫入我們計(jì)算的設(shè)置頻率的值 //PCA_Pre = presale 地址是0xFE,可以數(shù)據(jù)手冊(cè)里查找到 PCA9685_Write(PCA_Pre,prescale); //重新復(fù)位 PCA9685_Write(PCA_Model,oldmode); //等待復(fù)位完成 delay_1ms(5); //設(shè)置MODE1寄存器開啟自動(dòng)遞增 PCA9685_Write(PCA_Model,oldmode|0xa1); } // /****************************************************************** * 函 數(shù) 名 稱:setAngle * 函 數(shù) 說 明:設(shè)置角度 * 函 數(shù) 形 參:num要設(shè)置的PWM引腳 angle設(shè)置的角度 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void setAngle(uint8_t num,uint8_t angle) { uint32_t off = 0; off = (uint32_t)(158+angle*2.2); PCA9685_setPWM(num,0,off); } /****************************************************************** * 函 數(shù) 名 稱:PCA9685_Init * 函 數(shù) 說 明:PCA9685初始化,所有PWM輸出頻率配置與所有PWM引腳輸出的舵機(jī)角度 * 函 數(shù) 形 參:hz設(shè)置的初始頻率 angle設(shè)置的初始角度 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void PCA9685_Init(float hz,uint8_t angle) { uint32_t off = 0; PCA9685_GPIO_Init(); //在MODE1地址上寫0x00 PCA9685_Write(PCA_Model,0x00); //這一步很關(guān)鍵,如果沒有這一步PCA9685就不會(huì)正常工作。 // pwm.setPWMFreq(SERVO_FREQ)函數(shù)主要是設(shè)置PCA9685的輸出頻率, // PCA9685的16路PWM輸出頻率是一致的,所以是不能實(shí)現(xiàn)不同引腳不同頻率的。 // 下面是setPWMFreq函數(shù)的內(nèi)容,主要是根據(jù)頻率計(jì)算PRE_SCALE的值。 PCA9685_setFreq(hz); //計(jì)算角度 off = (uint32_t)(145+angle*2.4); //控制16個(gè)舵機(jī)輸出off角度 PCA9685_setPWM(0,0,off); PCA9685_setPWM(1,0,off); PCA9685_setPWM(2,0,off); PCA9685_setPWM(3,0,off); PCA9685_setPWM(4,0,off); PCA9685_setPWM(5,0,off); PCA9685_setPWM(6,0,off); PCA9685_setPWM(7,0,off); PCA9685_setPWM(8,0,off); PCA9685_setPWM(9,0,off); PCA9685_setPWM(10,0,off); PCA9685_setPWM(11,0,off); PCA9685_setPWM(12,0,off); PCA9685_setPWM(13,0,off); PCA9685_setPWM(14,0,off); PCA9685_setPWM(15,0,off); delay_1ms(100); }
在文件bsp_pca9685.h中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-25 LCKFB-LP first version */ #ifndef _BSP_PCA9685_H_ #define _BSP_PCA9685_H_ #include "board.h" //端口移植 #define RCC_PCA9685_GPIO_ENABLE() __RCC_GPIOA_CLK_ENABLE() #define PORT_PCA9685 CW_GPIOA #define GPIO_SDA GPIO_PIN_5 #define GPIO_SCL GPIO_PIN_6 //設(shè)置SDA輸出模式 #define SDA_OUT() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_PCA9685, &GPIO_InitStruct); } //設(shè)置SDA輸入模式 #define SDA_IN() { GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pins = GPIO_SDA; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; GPIO_Init(PORT_PCA9685, &GPIO_InitStruct); } //獲取SDA引腳的電平變化 #define SDA_GET() GPIO_ReadPin(PORT_PCA9685, GPIO_SDA) //SDA與SCL輸出 #define SDA(x) GPIO_WritePin(PORT_PCA9685, GPIO_SDA, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) #define SCL(x) GPIO_WritePin(PORT_PCA9685, GPIO_SCL, (x?GPIO_Pin_SET:GPIO_Pin_RESET) ) #define PCA_Addr 0x80 //IIC地址 #define PCA_Model 0x00 #define LED0_ON_L 0x06 #define LED0_ON_H 0x07 #define LED0_OFF_L 0x08 #define LED0_OFF_H 0x09 #define PCA_Pre 0xFE //配置頻率地址 void PCA9685_Init(float hz,uint8_t angle); void setAngle(uint8_t num,uint8_t angle); void PCA9685_setFreq(float freq); void PCA9685_setPWM(uint8_t num,uint32_t on,uint32_t off); #endif
四、移植驗(yàn)證
在自己工程中的main主函數(shù)中,編寫如下。
/* * Change Logs: * Date Author Notes * 2024-06-25 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_pca9685.h" int32_t main(void) { uint8_t i = 0; board_init(); uart1_init(115200); printf("startrn"); PCA9685_Init(60,0); //PCA9685--16路舵機(jī)初始化 頻率60Hz -- 0度 delay_ms(1000); while(1) { i = ( i + 1 ) % 180; setAngle(0,i); delay_ms(10); } }
移植現(xiàn)象:0號(hào)接口的舵機(jī)從0度一直移動(dòng)到180度后,又回到0度。

模塊移植成功案例代碼:
鏈接:https://pan.baidu.com/s/1UrA4XVIjnRYQAL4bSxNIfg?pwd=LCKF
提取碼:LCKF
-
微控制器
+關(guān)注
關(guān)注
48文章
7903瀏覽量
153684 -
驅(qū)動(dòng)模塊
+關(guān)注
關(guān)注
0文章
65瀏覽量
14359 -
舵機(jī)
+關(guān)注
關(guān)注
17文章
292瀏覽量
41692 -
CW32
+關(guān)注
關(guān)注
1文章
242瀏覽量
1092
發(fā)布評(píng)論請(qǐng)先 登錄
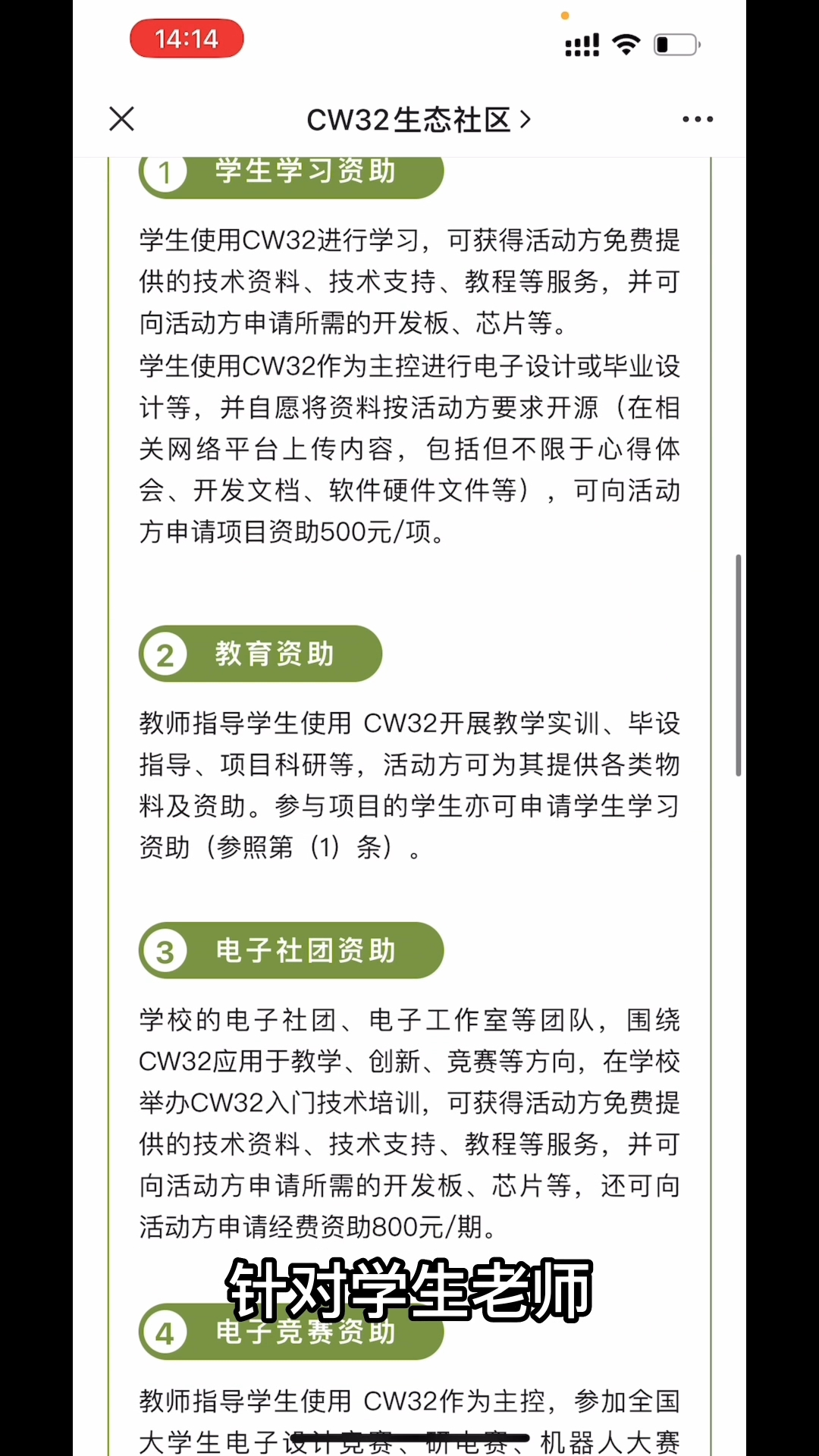
【CW32移植Free-RTOS】CW32開發(fā)者扶持計(jì)劃

【項(xiàng)目展示】基于CW32的遙控循跡小車

基于武漢芯源半導(dǎo)體CW32的無刷電機(jī)訓(xùn)練營正式結(jié)營!
【CW32飯盒派開發(fā)板試用體驗(yàn)】+機(jī)械臂游戲項(xiàng)目(開源)(4)多加點(diǎn)東西
CW32單片機(jī)在智能馬桶的應(yīng)用介紹
16路模塊+PWM舵機(jī)驅(qū)動(dòng)板+控制器+機(jī)器人+IIC接口+
cw32和stm32的區(qū)別
cw32和gd32的區(qū)別

基于CW32的遙控循跡小車
【CW32模塊使用】SG90舵機(jī)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論