 家里亂成“垃圾場”,樹莓派也能一鍵搞定家務了?
家里亂成“垃圾場”,樹莓派也能一鍵搞定家務了?
在科技飛速發展的今天,我們的生活正逐漸被各種智能設備所改變。今天,就來給大家介紹一個超酷的科技組合——樹莓派+myCobot機械臂!這個組合不僅能讓你體驗到科技的魅力,還能為你的生活帶來無限可能。
一、樹莓派+機械臂,科技界的“夢幻組合”
樹莓派,這款小巧而強大的單板計算機,一直以來都是科技愛好者的寵兒。而myCobot機械臂,作為一款高性能的六軸機械臂,更是憑借其靈活的操控性和強大的功能,贏得了眾多科技迷的喜愛。當樹莓派遇上myCobot機械臂,會擦出怎樣的火花呢?

myCobot機械臂自帶Ubuntu系統,支持ROS開發環境,還配備了圖形化編程工具RobotFlow,即使是編程小白,也能通過簡單的拖拽操作,快速上手。而樹莓派的強大社區支持,能讓你輕松找到各種教程和案例。
二、樹莓派+機械臂,生活中的“創意魔法師”
樹莓派+myCobot不僅是一個家務助手,更是一個充滿創意的“魔法師”。你可以通過簡單的編程,讓它實現各種有趣的創意功能。比如:
1. 貓互動機器人:和寵物一起玩耍
一名日本用戶通過編程讓myCobot模仿貓咪的玩耍動作,吸引了日本媒體Fuji News Network和Yahoo Japan的報道。想象一下,當你忙碌的時候,機械臂可以和你的寵物互動,逗得它們樂此不疲。這不僅解決了寵物無聊的問題,還能讓你的生活充滿樂趣。

2. 懸浮盒投影:打造家庭科技秀
通過在myCobot上安裝投影儀,結合人臉檢測和激光掃描技術,可以創建一個看起來懸浮在空中的盒子幻覺。這種創意不僅適合家庭娛樂,還能在派對上成為全場焦點,讓你瞬間變身“科技達人”。
3. 天花板機器人:靈活安裝,隨心所欲
一名用戶將myCobot倒掛在天花板上,探索家庭機器人的概念。這種靈活的安裝方式,不僅節省空間,還能讓機械臂隨時為你服務。比如,它可以幫你拿東西、整理桌面,甚至還能在你睡覺時自動關燈。
三、手眼標定,精準抓取的關鍵
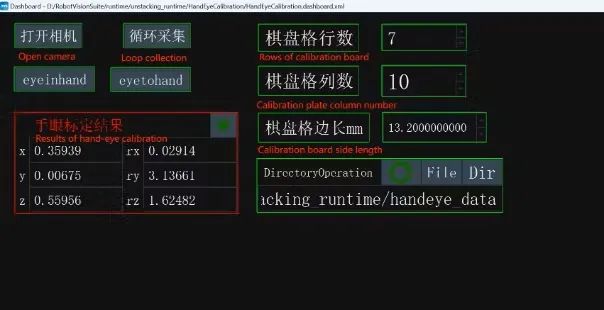
為了讓機械臂能夠精準地識別和抓取物體,手眼標定是必不可少的一步。通過手眼標定,機械臂可以準確地將深度相機的坐標系統與自身坐標系統對齊,從而實現精準的視覺引導和抓取。具體步驟如下:
1. 準備標定板
選擇一個黑白棋盤格作為標定板,其幾何結構非常規則,邊緣和角點位置可以準確計算和建模,這使得標定算法能夠準確估計相機與棋盤格之間的幾何關系。
2. 固定深度相機和機械臂
將深度相機固定在機械臂上,確保相機的位置不會隨著機械臂的運動而改變。

3. 匹配特征點
將標定板放置在相機的視野內,并多次旋轉標定板以捕獲提供豐富視覺信息的圖像。對于每個標定板圖像,使用角點檢測算法提取網格線交點的坐標特征。
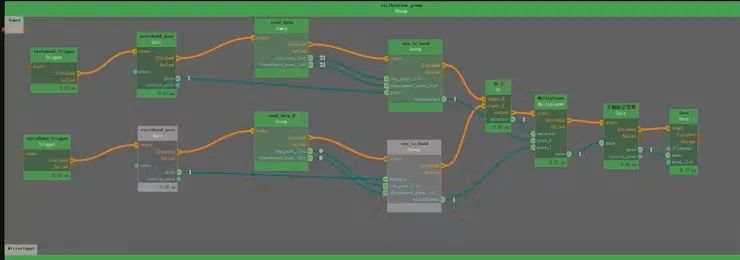

4. 計算標定坐標
獲取不同角度和位置的20組特征點數據,然后使用RVS提供的算法計算手眼標定值,并記錄手眼標定結果,以便后續在機械臂坐標系統和相機坐標系統之間進行轉換。
四、物體檢測與識別,智能抓取的基礎
在完成手眼標定后,接下來就是讓機械臂學會識別目標物體。以木塊為例,具體步驟如下:
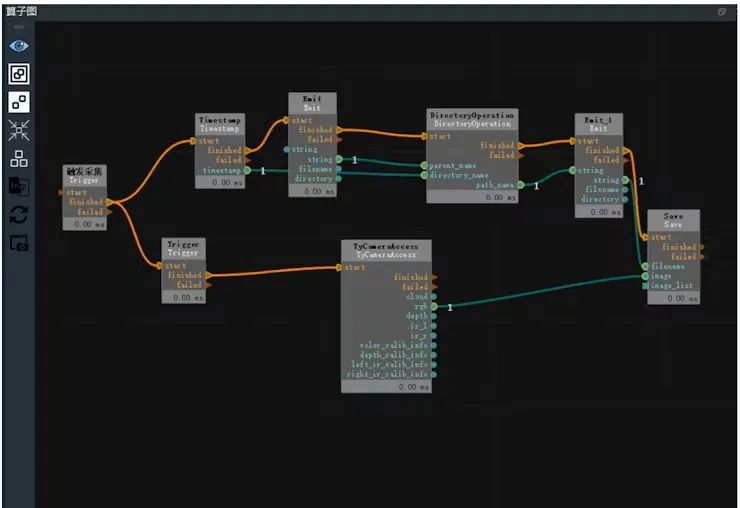
1. 收集圖像
使用深度相機收集木塊的圖像,并將它們保存在指定路徑下。收集的圖像越多,數據越準確。
2. 安裝LabelMe
安裝必要的Python庫以使用LabelMe進行圖像標注。
pip install PyQt5pip install labelme
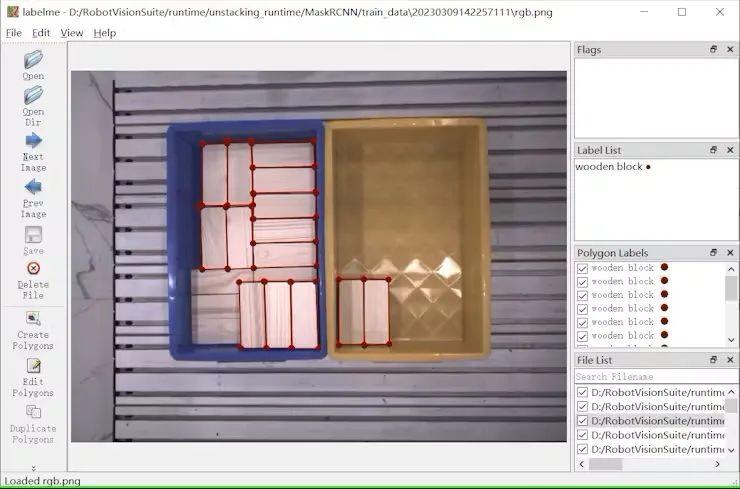
3. 標注過程
打開LabelMe,找到保存圖像的路徑,然后點擊“Create Polygons”繪制紅色邊界框,將木塊標注出來。給標注結果命名,例如“wooden block”,并重復此步驟標注所有收集的圖像。
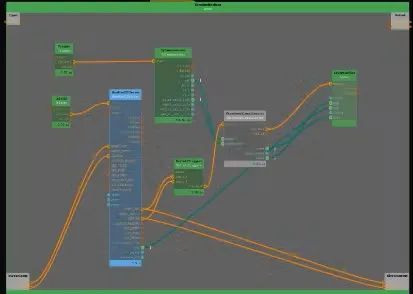
4. AI推理
將標注好的圖像提交給RVS的AI訓練功能,生成訓練輸出文件夾,從中獲取標注數據的權重文件。通過AI推理,訓練好的模型可以應用于實際場景,處理新的輸入數據并生成相應的輸出結果。
五、機械臂路徑規劃,實現高效抓取
在識別到物體后,機械臂需要規劃運動路徑以到達抓取點。具體步驟如下:
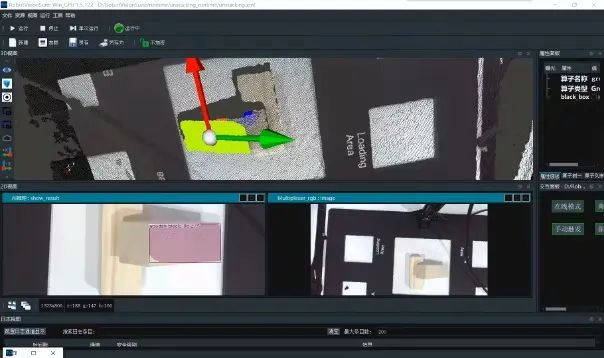
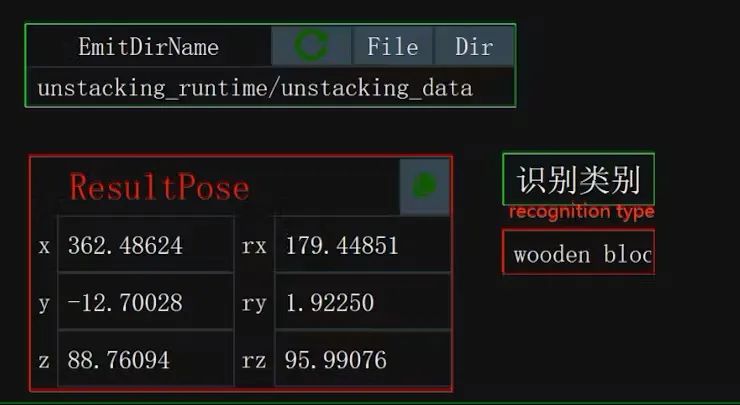
1. 獲取物體坐標
通過深度相機返回的3D坐標,獲取木塊相對于機械臂的坐標。
2. 計算末端執行器姿態
使用以下代碼計算末端執行器的姿態:
import numpy as np# 轉換旋轉矩陣和歐拉角def CvtRotationMatrixToEulerAngle(pdtRotationMatrix): pdtEulerAngle = np.zeros(3) pdtEulerAngle[2] = np.arctan2(pdtRotationMatrix[1,0], pdtRotationMatrix[0,0]) fCosRoll = np.cos(pdtEulerAngle[2]) fSinRoll = np.sin(pdtEulerAngle[2]) pdtEulerAngle[1] = np.arctan2(-pdtRotationMatrix[2,0], (fCosRoll * pdtRotationMatrix[0,0]) + (fSinRoll * pdtRotationMatrix[1,0])) pdtEulerAngle[0] = np.arctan2((fSinRoll * pdtRotationMatrix[0,2]) - (fCosRoll * pdtRotationMatrix[1,2]), (-fSinRoll * pdtRotationMatrix[0,1]) + (fCosRoll * pdtRotationMatrix[1,1])) return pdtEulerAngledefCvtEulerAngleToRotationMatrix(ptrEulerAngle): ptrSinAngle = np.sin(ptrEulerAngle) ptrCosAngle = np.cos(ptrEulerAngle) ptrRotationMatrix = np.zeros((3,3)) ptrRotationMatrix[0,0] = ptrCosAngle[2] * ptrCosAngle[1] ptrRotationMatrix[0,1] = ptrCosAngle[2] * ptrSinAngle[1] * ptrSinAngle[0] - ptrSinAngle[2] * ptrCosAngle[0] ptrRotationMatrix[0,2] = ptrCosAngle[2] * ptrSinAngle[1] * ptrCosAngle[0] + ptrSinAngle[2] * ptrSinAngle[0] ptrRotationMatrix[1,0] = ptrSinAngle[2] * ptrCosAngle[1] ptrRotationMatrix[1,1] = ptrSinAngle[2] * ptrSinAngle[1] * ptrSinAngle[0] + ptrCosAngle[2] * ptrCosAngle[0] ptrRotationMatrix[1,2] = ptrSinAngle[2] * ptrSinAngle[1] * ptrCosAngle[0] - ptrCosAngle[2] * ptrSinAngle[0] ptrRotationMatrix[2,0] = -ptrSinAngle[1] ptrRotationMatrix[2,1] = ptrCosAngle[1] * ptrSinAngle[0] ptrRotationMatrix[2,2] = ptrCosAngle[1] * ptrCosAngle[0] return ptrRotationMatrix# 路徑規劃defcompute_end_effector_pose(current_pose, tool_pose): current_rotation = current_pose[:3,:3] current_translation = current_pose[:3,3] tool_rotation = tool_pose[:3,:3] tool_translation = tool_pose[:3,3] new_rotation = np.dot(current_rotation, tool_rotation) new_translation = np.dot(current_rotation, tool_translation) + current_translation new_pose = np.eye(4) new_pose[:3,:3] = new_rotation new_pose[:3,3] = new_translation return new_pose
3. 控制機械臂移動
根據計算出的末端執行器姿態,控制機械臂移動到目標位置并抓取物體。
六、未來生活,從樹莓派+機械臂開始
樹莓派+myCobot機械臂不僅是一個科技玩具,更是一個通往未來生活的窗口。它支持多種傳感器和執行器的擴展,可以實現復雜的功能。比如,你可以讓它配合攝像頭,實現顏色識別和追蹤;或者讓它和語音助手結合,通過語音指令完成任務。這個組合就像一個神奇的盒子,等著你去探索更多的可能性。
七、總結
樹莓派+myCobot機械臂的組合,不僅能為你的生活帶來便利,還能讓你體驗到科技的魅力。它就像一個“創意魔法師”,為你的生活增添無限樂趣。如果你也想讓生活變得更有科技感,那就趕緊行動起來吧!讓我們一起用樹莓派和myCobot機械臂,開啟未來生活的新篇章!你還在等什么?快去試試吧!
-
嵌入式
+關注
關注
5141文章
19535瀏覽量
315013 -
機械臂
+關注
關注
13文章
544瀏覽量
25222 -
樹莓派
+關注
關注
121文章
1944瀏覽量
106989
發布評論請先 登錄
用樹莓派“揪出”家里的耗電怪獸!

都市生活一鍵搞定
樹莓派pico入門學習筆記(一)相關資料推薦
如何給樹莓派添加開、關機鍵
S7-200 PLC在垃圾場CMF膜污水處理系統中的應用
樹莓派也出MCU了?樹莓派Pico來了!

樹莓派pico入門學習筆記(一)
樹莓派+Balena OS:一鍵解鎖智能硬件新技能!





 工商網監
工商網監
評論