 2025的機器人控制芯片,已經發展到何種程度了?
2025的機器人控制芯片,已經發展到何種程度了?

本文作者黃燁鋒
ASPENCORE 資深產業分析師,常駐上海,專注成像、移動與半導體,熱愛理論技術研究。
從去年開始,電子工程專輯對機器人的關注度明顯增加了:主要是因為這個領域漸有爆發之勢。黃仁勛在去年的不止一個場合都說過機器人即將迎來“ChatGPT時刻”,NVIDIA眼中在生成式AI之外的下一個爆點就是機器人;
行業內像ROSCon這樣的機器人開發者大會越來越火;宇樹科技機器人亮相春晚扭秧歌,特斯拉擎天柱機器人疊衣服等引發極大關注......這些都讓人感覺機器人正在以前所未有的速度發展。
這就給作為機器人底層動力的芯片,提供了巨大的市場機會。在最近先楫半導體與好上好信息共同舉辦的“共話機器人,智鏈未來”新春茶話會上,先楫半導體方案及FAE總監余國民把人形機器人的核心構成分成了4部分:
(1)大腦決策層——包括現在常說的AI大模型,及復雜決策——這也是過去一年我們關注得最多,NVIDIA常說的“3臺機器人”的機會點;
(2)運動控制-即機器人“身體”,包括動力系統、運動控制系統、關節結構、靈巧手等;
(3)環境感知,相當于機器人的感官,涵蓋各種傳感器;
(4)實時通信,余國民稱其為機器人的“神經”,相關于機器人內部各組成部分的互通互聯,他還強調了機器人這部分的可靠性和穩定性要求。

“機器人身上的部件、芯片很多。”余國民說,“先楫半導體除了大腦沒有涉足,其他部位我們都有。比如運動控制、關節這部分是我們的強項;實時通信這塊,我們有工業以太網芯片,也在探索TSN的可能性”;“而像我們的HPM5300系列芯片尺寸小、算力高,很適合做傳感器后端的控制處理芯片”。
目前先楫半導體在國內的機器人領域已經累積了過百家客戶,“有做整機的,也有做供應鏈的”,“有做協同機械臂的、人形機器人的、機器狗的等等”,“很多都已經實現了量產”。基于先楫半導體目前在機器人領域的涉足廣度,及已經有不少落地產品,這也成為我們理解當前機器人技術發展需求及現狀的絕佳窗口。
01
機器人主控芯片的5個要求和趨勢
先楫半導體執行副總裁、市場銷售負責人陳丹在活動開場致辭中提到芯片賦能機器人發展體現在“5個高度”上,分別是高算力、高性能運動控制、高實時性通信、高集成度、高安全性。先楫半導體產品總監費振東也將這5點視作機器人對主控芯片的要求及發展趨勢,是先楫“在機器人行業與我們的客戶交流和溝通過程中體會到的”。
第一,高算力。“機器人未來會走向各個行業,走進千家萬戶。社會大眾對其功能預期很高。”費振東在演講中說,“出色的功能和運動能力都離不開高算力的CPU,這樣才能讓復雜算法落地。”
除了通常我們說節點內要求達成高實時響應的ADC采集、FFT加速等功能特性也屬于高算力范疇,這一點的關鍵自然就是MCU核心的控制和處理速度。余國民舉例說先楫的HPM6E00系列MCU憑借其卓越性能,CPU計算電流環延遲可實現1.06μs,以往要達到這一級別的性能,通常需要依賴FPGA或是國外大廠芯片的快速電流環技術。
與此同時,VSC(坐標變換)+ CLC(環路計算)+ PWMv2多模塊構成的硬件電流環也顯著減少了關節伺服電流環計算延時(可達數百納秒),滿足對電流環更高的快速響應需求。這套方案是在“高算力”的前提下“兼顧靈活性和便捷性”。這應該算是體現“高算力”機器人控制芯片屬性的典型了。

第二,高性能運動控制。主流機器人機械運動執行,目前都以伺服電機結構為主,尤其是常見的人形機器人和機器狗——一個動作需要很多電機組合完成。這就要求主控芯片具備很強的運動控制能力。機器人軀體的運動,包括各關節的不同軸向運動組合完成復雜任務,這是機器人與物理世界交互的基礎。
雖然機器人的關節驅動看起來和工業領域的傳統伺服驅動很相似,但通常機器人要求更快的響應速度,包括力矩環、電流環的響應要求;同時機器人不少關節較小,也就要求更高的功率密度和集成度;而且機器人一般為電池供電,更要求考慮效率問題。
幾名發言人都強調運動控制是先楫的絕對強項,“無論是各個關節的伺服,還是靈巧手”,“我們都已經有相關產品落地”。
第三,高實時性的同步通訊。如前所述,機器人全身有大量關節、部件,“一些比較大的機器人身上有少則幾十,多則上百個自由度(能夠獨立運動的關節數量);每個自由度都意味著一個運動控制的執行機構。幾十上百個電子控制器協同完成各種動作。”費振東表示,“這就需要機器人全身的各個組件高度協調,因而對主控芯片提出了高實時同步需求。”
這應當也是先楫目前正尋求突破的技術點:比如說在通信技術方面,對于目前在工業和機器人領域都很火的EtherCAT網絡,陳丹特別提到了先楫半導體的HPM6E00系列“是國內首個拿到德國倍福(Beckhoff)正式授權的EtherCAT從站控制器高性能MCU”,“這原本是個常年被海外企業占據的市場,很高興中國芯片2023年也在這個領域有了一席之地。”
第四,高集成度與小型化。受限于機器人本身的尺寸,需要在有限空間內完成電子系統設計,留給芯片及對應的元器件的空間就更小。“我看到國內已經有一些客戶將幾塊板子疊在一起,每塊板子上面都有MCU、FPGA,還有網絡連接所需的部分等等都放在一起。”
“人形機器人很多關節要求小尺寸,靠近手、腳的末端尺寸可能就變得非常小。”針對系統的高集成度和小型化提出了要求。活動現場甚至有工程師在QA環節提到希望先楫能盡快推出便于實現更小型化系統的芯片產品,先楫則表示相關新產品已經就緒即將發布。
余國民說先楫現在的解決方案是將“原本所需的5顆芯片集成在一起”,另外集成脈沖、模擬、通訊類編碼器接口——“尤其編碼器接口,可以兼容所有主流絕對式編碼器;如BiSSC,不需要另外再用一顆芯片;還有芯片內集成的旋變解碼單元是很多工業領域的客戶需要的。”

第五,高安全與高可靠性。除了可靠與穩定性這類基本需求,考慮未來機器人在各行各業乃至普通家庭的普及,機器人作為先進電子系統,未來必然會成為網絡攻擊的目標。所以信息安全也需要提上日程。
02
對于這5點,先楫的對應方案
著眼這5點,自然與先楫本身的業務和技術方向有極大關聯——前文多少也已經提到。“公司成立之初,我們對產品的設想就和這幾點有著很高的重合度。”對先楫的機器人MCU芯片有進一步的認識,也有助于我們理解當代機器人MCU具體是什么樣的。
在高算力的問題上,先楫認為雖然國內進入MCU賽道的企業不少,但大多集中在“入門和主流”定位,“高性能MCU仍然是薄弱環節”。
下面這張圖是目前先楫的MCU產品矩陣,橫軸為管腳數,縱軸為性能劃分。費振東說即便是主流定位的HPM5300系列,“雖然在先楫被定位在入門級,但它仍然達到了480MHz的主頻,覆蓋48-100腳”;而中間高性能定位的“HPM6200和HPM6300系列廣受用戶好評”;更不用說高端定位的HPM6700, HPM6800和HPM6E00系列。

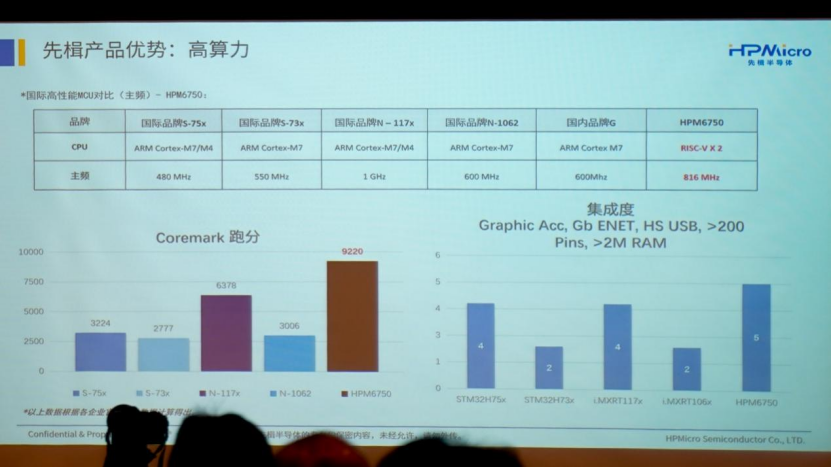
以先楫2022年推出的首個HPM6750系列芯片為例——集成2個816MHz主頻的RISC-V核,就已經著眼在了高性能領域。“即便是2、3年后的現在,相比國際廠商后續推出的更高性能的產品,我們的這款產品在性能上也絲毫不遜色。”從CoreMark跑分及芯片集成度的角度,都優于同級別的競品。
以先楫2022年推出的首個HPM6750系列芯片為例——集成2個816MHz主頻的RISC-V核,就已經著眼在了高性能領域。“即便是2、3年后的現在,相比國際廠商后續推出的更高性能的產品,我們的這款產品在性能上也絲毫不遜色。”從CoreMark跑分及芯片集成度的角度,都優于同級別的競品。
而優秀的運動控制能力,被先楫的幾名發言人反復提及。“從2023年下半年發布的HPM5300系列開始,先楫的MCU集成了功能相當強的運動控制系統,受到了廣泛的用戶好評。費振東談到了先楫特有的,且廣受客戶好評的精確運動控制系統,如下圖所示。
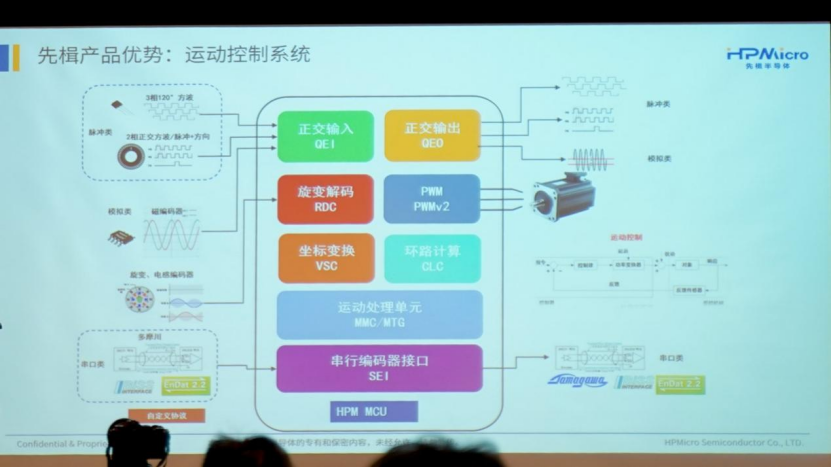
“此外,芯片上也集成了硬件控制環路計算單元……”“所有這些模塊都進一步降低了CPU負載,把基于先楫產品設計的電機驅動器、運動控制器性能都推到了全新高度。”
通訊能力方面,具體到先楫的MCU產品,表現在提供比較豐富的通訊接口——下圖以HPM6E80為例,框出了通信資源;與此同時,,先楫認為隨著機器人技術的持續深入發展,機器人需要性能更強、實時性更高的網絡通信協議。
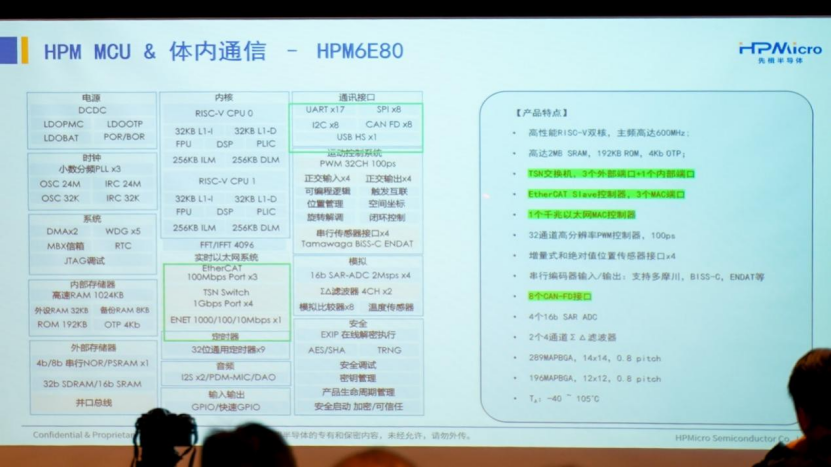
除了前文已經提到HPM6E80作為率先在國內獲得倍福(Beckhoff)正式授權的EtherCAT從站控制器高性能MCU支持目前國內外廣泛采用的EtherCAT高實時性工業以太網協議費振東和余國民還同時特別談到了下一代實時網絡,這些實時網絡能夠滿足像是視頻這類數據的大吞吐量要求,也能滿足關節控制信號的實時性要求。先楫已經在產品中對下一代實時網絡做出了率先的支持,并且和合作伙伴一起為客戶的研發提供更多的方案支持。
而在高集成度/小型化的問題上,實際上前文例舉的關高算力、高性能運動控制等命題往往與高級程度相互關聯。即高集成度在一定程度上是實現高算力、高性能運動控制的基礎;比如將ESC集成在芯片內,就有利于高實時性的達成。
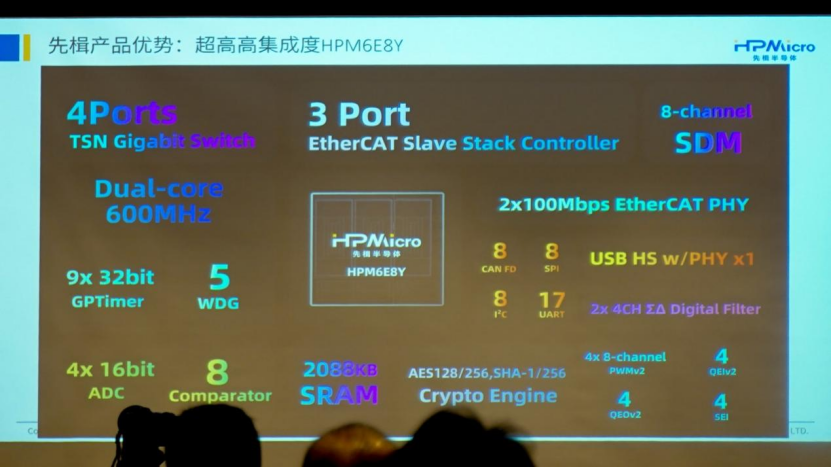
不過還有個更為具體的例子。先楫在今年CES展會上展示的HPM6E8Y就在原來HPM6E00系列基礎上進一步提高了集成度。下面這張圖展示了這款產品集成的各種資源,費振東特別強調了“HPM6E8Y集成兩個百兆以太網PHY在業界引起了熱烈反響,不少客戶已著手相關產品開發”。這“為關節伺服設計進一步減少板級尺寸、BOM數量,提高系統級集成度打下了堅實基礎”。
最后是高安全與高可靠性需求。費振東說信息安全系統也是先楫MCU產品的優勢之一。他舉例HPM6E00系列產品的信息安全考量:包括硬件加解密引擎、完整信任鏈、密鑰管理、基于生命周期的安全管理,以及一定程度的攻擊檢測和防護。“在未來相當長的時間里,能夠滿足各類信息安全規范和要求。”
03
是整個產業鏈的進步
基于以上布局,下面這張圖給出了在一個人形機器人之上,先楫可提供對于其不同位置的產品支持。雖然這只是一類應用的示例,但我們認為在總結機器人運動控制能力的問題上是頗具代表性的。

如文首提到的,先楫目前在機器人領域已經積累了超過百家客戶,涵蓋了各種不同類型的機器人——甚至包括一些特殊用途的機器人,比如進行海底泥土采集的、在太空中做物體抓取的,稱得上是上天下海了。余國民形容先楫涉足“機器人全產業鏈布局”,“微型伺服、絕對值編碼器、電動夾爪、ARM移動機器人、AGV小車、各類機械臂、人形機器人等等。”“機器人還沒像現在這么火的時候,先楫其實就已經開始做機器人芯片了。”
現如今的機器人技術發展“不是以月為單位了,每天都能看到新東西”,從當年“大家看到波士頓動力的機器狗為之震撼”,到現在“會扭秧歌的宇樹機器人”。

“以前的機器狗和機器人需要人去編程,軸向也少,很容易出問題。”而現在能站在舞臺上跳舞的機器人,“大腦用上了AI大模型、VLM,外加高算力GPU;一個人形機器人幾十上百個關節;關節點驅動取代傳統液壓驅動,關節功率密度也更大,通訊標準和方式變得更優秀,響應特性更好;機器人身上也集成了很多傳感器...”余國民在談推動機器人發展的技術時說。
雖然現階段機器人相關最熱的話題在于其大腦和AI,但在先楫看來機器人技術現如今是一天一進步,“是整個產業鏈的共同進步”,“進步的是我們,也包括做集成解決方案的、做供應鏈的合作伙伴,還有我們的客戶”。
“幾年前我們去拜訪杭州某家頭部機器人客戶的時候,他們公司門口有片公園。當時的機器狗在公園里走,踩到石子就會摔倒。但再看現在他們的新產品,走路絲滑流暢。”這是包含先楫半導體在內,機器人全產業鏈共同努力的結果。
本文轉自EETC
-
機器人
+關注
關注
213文章
29615瀏覽量
212192 -
控制芯片
+關注
關注
2文章
549瀏覽量
40167
發布評論請先 登錄
盤點#機器人開發平臺
人形機器人火爆背后,先楫半導體解構運動控制芯片進化密碼

【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
什么是機器人?追蹤機器人技術的發展和未來
安森美在自主移動機器人領域的發展成果
從單芯片方案到多類型傳感,ADI賦能人形機器人創新







 工商網監
工商網監
評論