") LabVIEW運動控制(二):EtherCAT運動控制器的多軸示教加工應用(上)
LabVIEW運動控制(二):EtherCAT運動控制器的多軸示教加工應用(上)
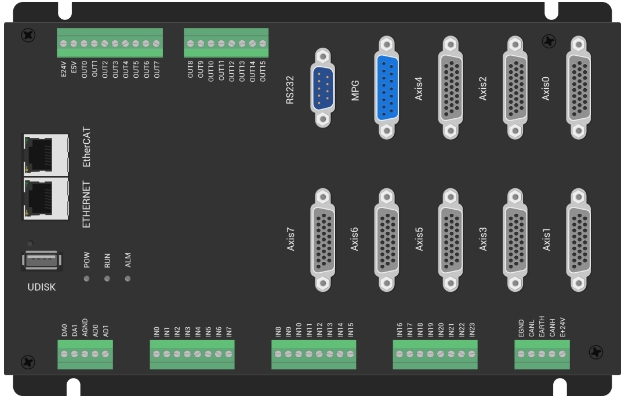
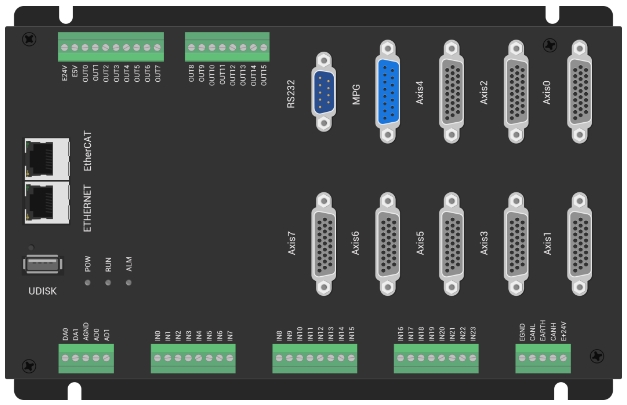
ZMC408CE 高性能總線型運動控制器
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應用于各種需要脫機或聯(lián)機運行的場合。
ZMC408CE支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE硬件功能特性:
1.支持8軸運動控制(脈沖+EtherCAT總線),EtherCAT同步周期可快至125us;
2.24路通用輸入、16路通用輸出,模擬量AD/DA各兩路;
3.8路10MHz高速差分脈沖輸出,總線軸、脈沖軸可混合插補;
4.高性能處理器,提升運算速度、響應時間和掃描周期等;
5.一維/二維/三維、多通道視覺飛拍,高速高精;
6.位置同步輸出PSO,連續(xù)軌跡加工中對精密點膠膠量控制和激光能量控制等;
7.多軸同步控制,多坐標系獨立控制等;
8.直線插補、任意空間圓弧插補、螺旋插補、樣條插補等;
9.應用靈活,可PC上位機開發(fā),也可脫機獨立運行;
ZMC408CE視頻介紹,點擊→“高性能EtherCAT總線運動控制器,帶你玩轉“8通道獨立PSO”應用場景”查看。
更多關于ZMC408CE的詳情介紹,點擊“推薦|8通道PSO的高性能EtherCAT總線運動控制器”查看。
PCIE464M PCIe EtherCAT總線運動控制卡
PCIE464M是一款基于PCIe的PCI Express的EtherCAT總線運動控制卡,具有多項實時和高精度運動控制控制功能。
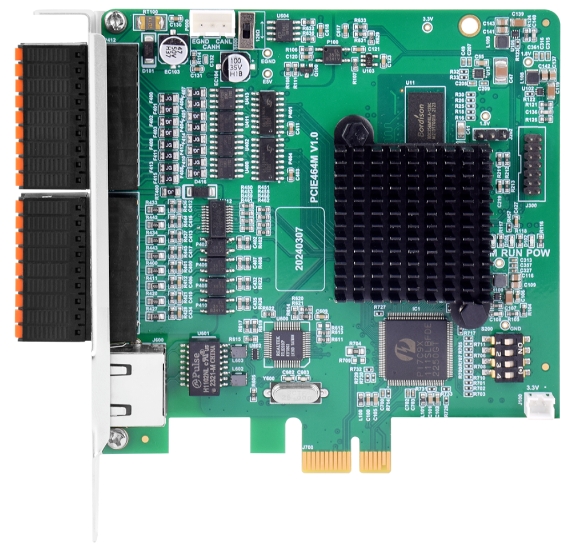
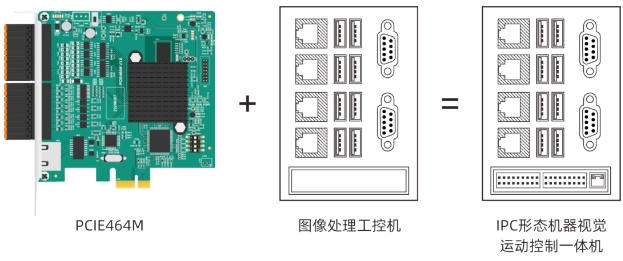
PCIE464M運動控制卡上自帶16進16出,第三方圖像處理工控機或PC無需額外配置IO數(shù)據(jù)采集卡和PLC,即可實現(xiàn)IPC形態(tài)的機器視覺運動控制一體機,簡化硬件架構,節(jié)省成本,軟硬件一體化。
PCIE464M硬件功能特性:
1.可選6-64軸運動控制,支持EtherCAT總線/脈沖/步進伺服驅動器;
2.聯(lián)動軸數(shù)最高可達16軸,運動周期最小為100μs;
3.標配16進16出,其中4路高速鎖存輸入、4路高速PWM和12路高速硬件比較輸出PSO;
4.支持PWM輸出、1D/2D/3D PSO硬件位置比較輸出、視覺飛拍、連續(xù)軌跡插補等;
5.支持30+機械手模型正逆解模型算法,比如SCARA、Delta、UVW、4軸/5軸 RTCP...;
6.支持掉電存儲和掉電中斷,多重加密,提供程序更安全機制;
7.8路單端脈沖軸、4路單端編碼器軸;
8.具有一維、二維螺距補償控制,實現(xiàn)更高的加工精度;
PCIE464M視頻介紹,點擊→“超高速PCle EtherCAT控制卡PCIE464M,即刻提升高速高精智能裝備生產(chǎn)力!”查看。
更多關于PCIE464M的詳情介紹,點擊“PCIE464M-高速高精,超高速PCIe EthrtCAT實時運動控制卡”查看。
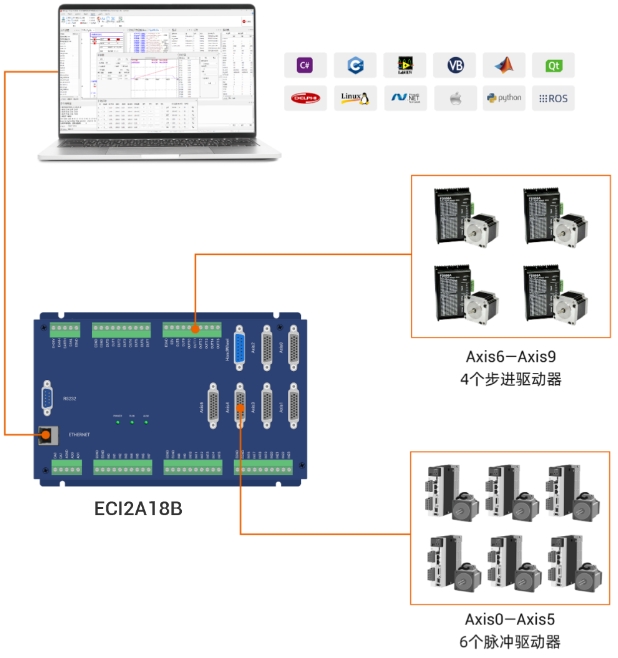
ECI2A18B 高性價比10軸運動控制卡
ECI2A18B是正運動推出的一款高性價比10軸脈沖型、模塊化的網(wǎng)絡型運動控制卡,采用優(yōu)化的網(wǎng)絡通訊協(xié)議可以實現(xiàn)實時的運動控制,同時支持多種通信協(xié)議,方便與其他工業(yè)控制設備連接和集成。安裝配置相對便捷,適合于模塊化和靈活性要求較高的控制系統(tǒng)。
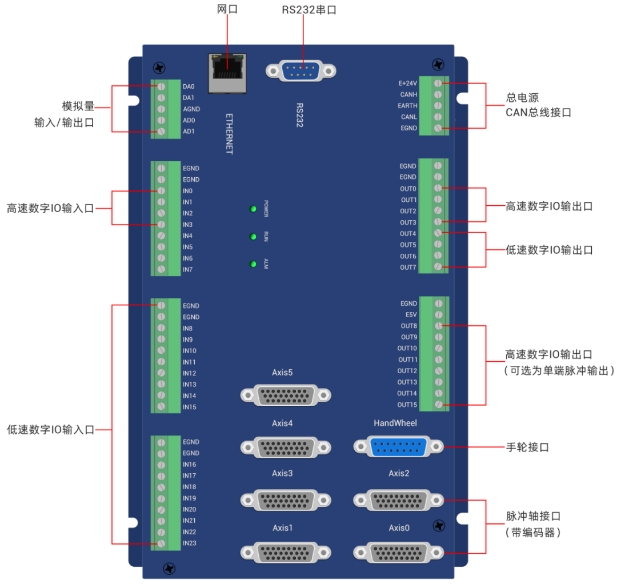
ECI2A18B控制卡最大可擴展至12脈沖軸,支持8路高速輸入和4路高速輸出,集成豐富的運動控制功能,包含多軸點位運動、電子凸輪,直線插補,圓弧插補,連續(xù)插補運動等,滿足多樣化的工業(yè)應用需求。
ECI2A18B硬件功能特性:
1.支持6路差分脈沖軸+4路單端脈沖軸運動控制;
2.支持1路專用的手輪輸入接口;
3.差分脈沖軸最大輸出脈沖頻率10MHz;
4.標配24+12進16+6出,其中支持4路高速鎖存,4路高速PWM,2路高速硬件比較輸出PSO(可選支持HW2功能);
5.可支持RTSys+其他高級上位機編程語言的混合編程支持;
6.支持RTBasic多任務編程;
ECI2A18B視頻介紹,點擊→“【加量不加價】高性價比十軸脈沖運動控制卡ECI2A18B 讓您的設備在自動化行業(yè)內(nèi)卷中脫穎而出!”查看。
更多關于ECI2A18B的詳情介紹,點擊“【加量不加價】正運動網(wǎng)絡型運動控制卡ECI2618B/ECI2A18B”查看。
??? 使用LabVIEW進行項目開發(fā)
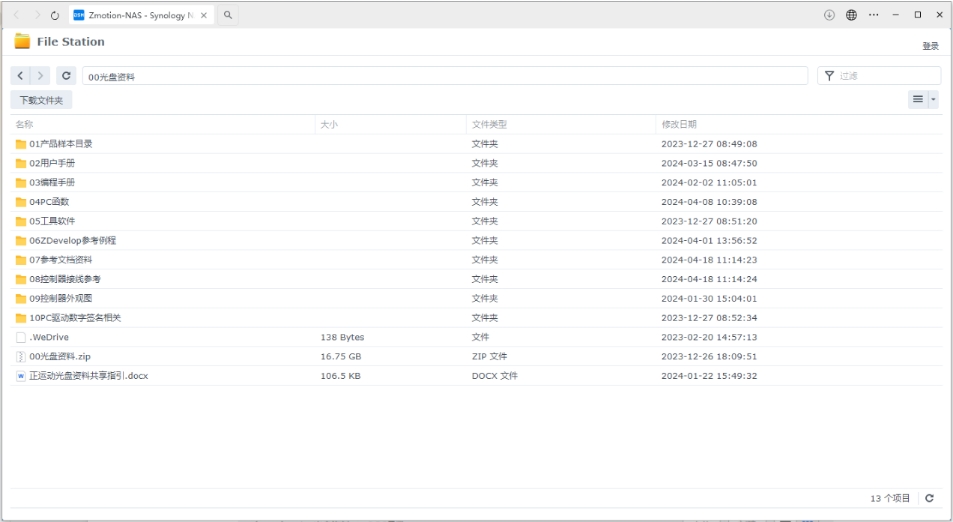
1.找到廠家提供的光盤資料里面的LabVIEW的VI庫文件,路徑如下。
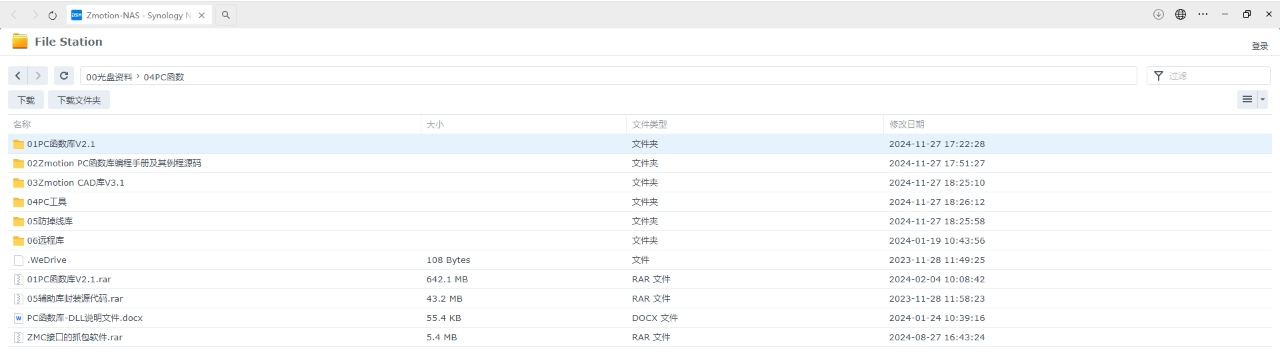
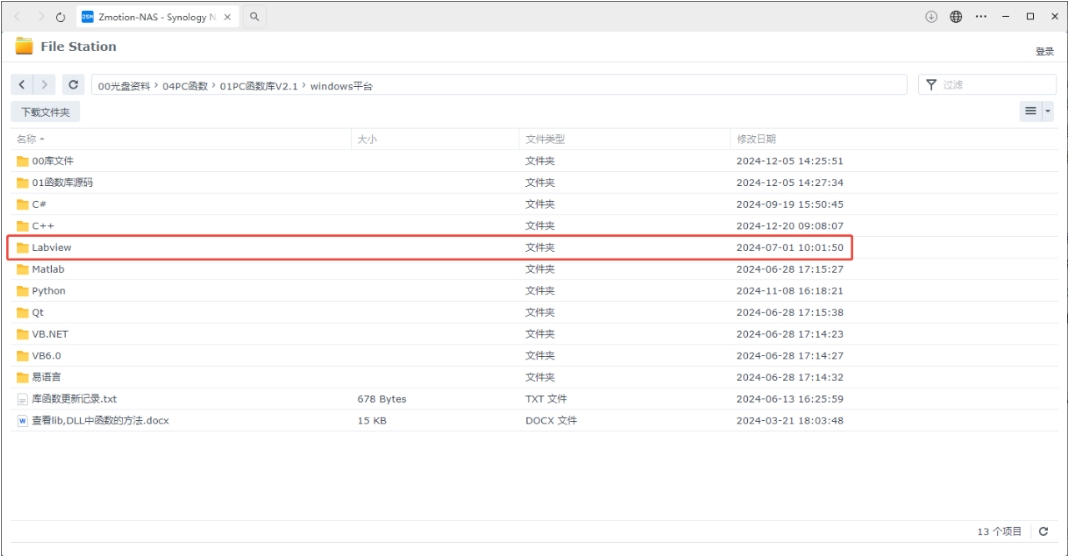
1)進入廠商提供的光盤資料找到“04PC函數(shù)”文件夾,并點擊進入。
2)選擇“01 PC函數(shù)庫V2.1”文件夾。
3)選擇“Windows平臺”文件夾。
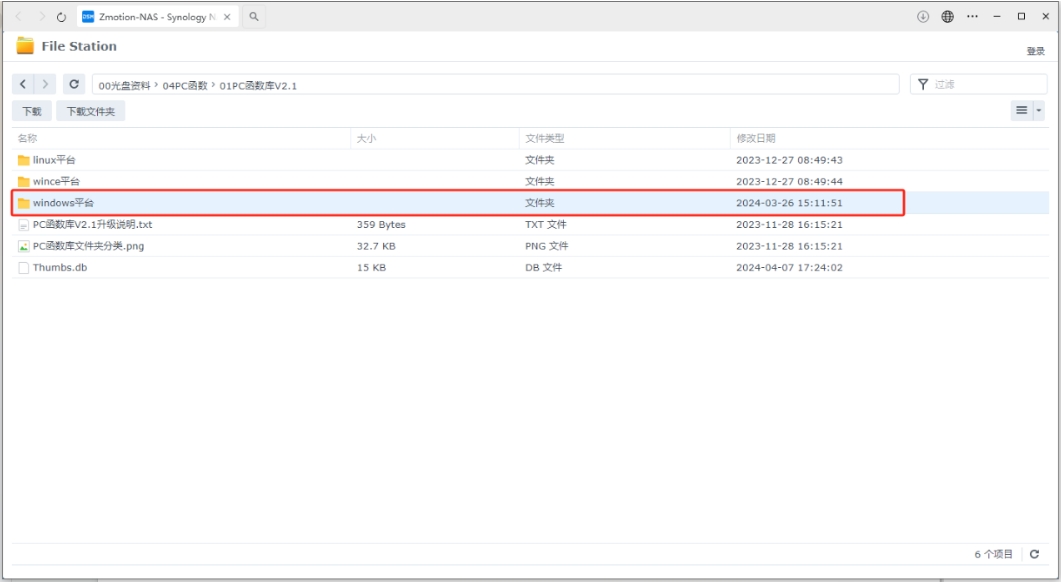
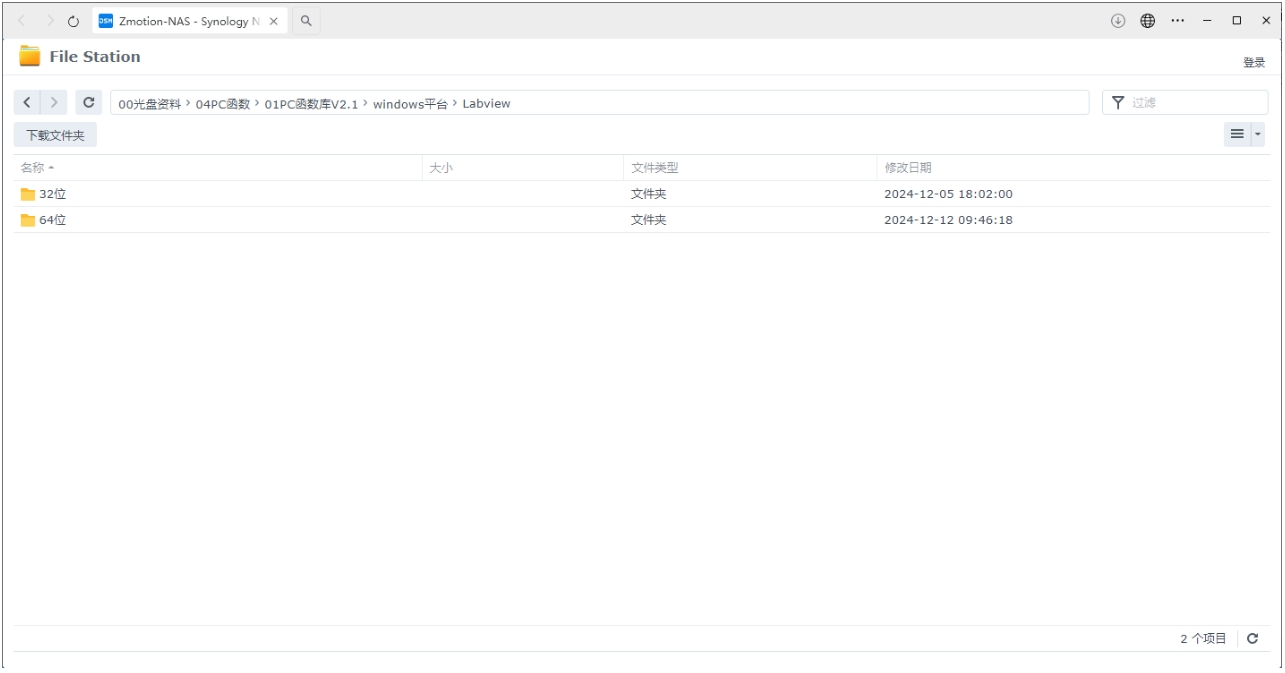
4)選擇“Labview文件夾”,里面有32位和64位的動態(tài)庫和例程。
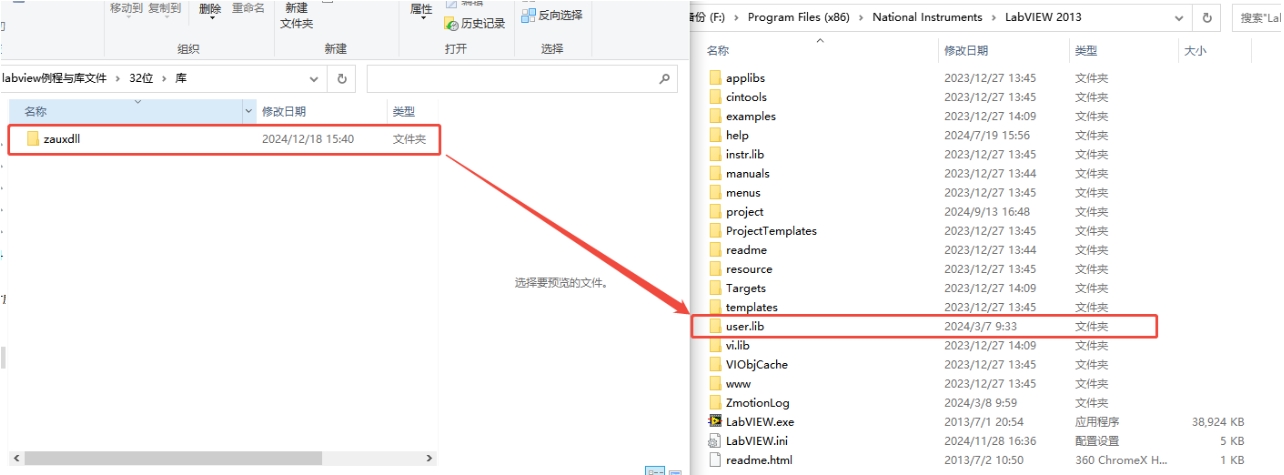
2.將廠商提供的LabVIEW的VI庫文件復制到LabVIEW安裝路徑下LabVIEW/user.lib的文件夾內(nèi)。
1)找到解壓的VI庫文件夾
(zauxdll是32位的VI庫,64的VI庫是newZauxDll64)
。


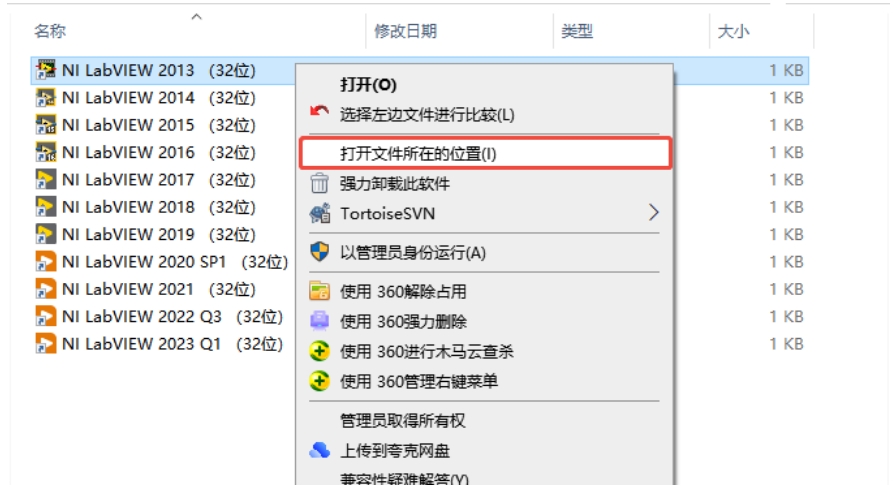
2)選中LabVIEW右擊打開文件所在位置
(這里以LabVIEW2013-32位為演示)
。
3)將整個VI庫文件夾直接復制放到user.lib該目錄,然后關閉LabVIEW軟件重新啟動。
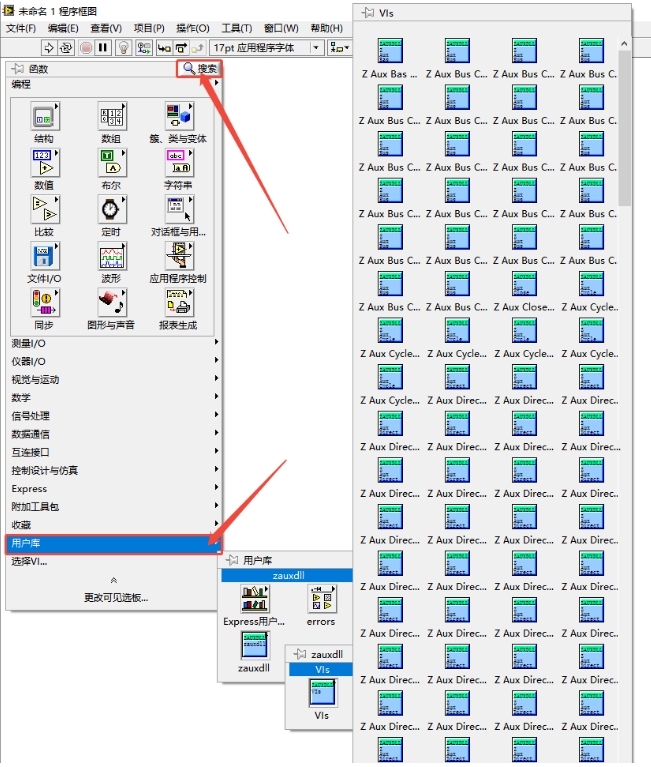
3.重新啟動LabVIEW后,選擇新建VI,然后右鍵點擊VI程序框圖空白處,選擇用戶庫來找到添加的VI庫,或者直接搜索VI,最后將需要的函數(shù)直接拖到面板上。

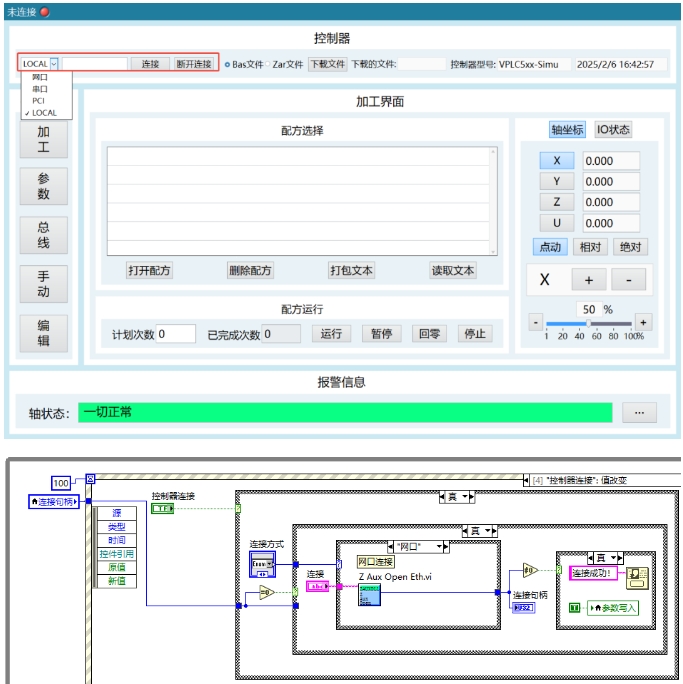
???控制器連接
PC函數(shù)手冊可在光盤資料查看,具體路徑如下。

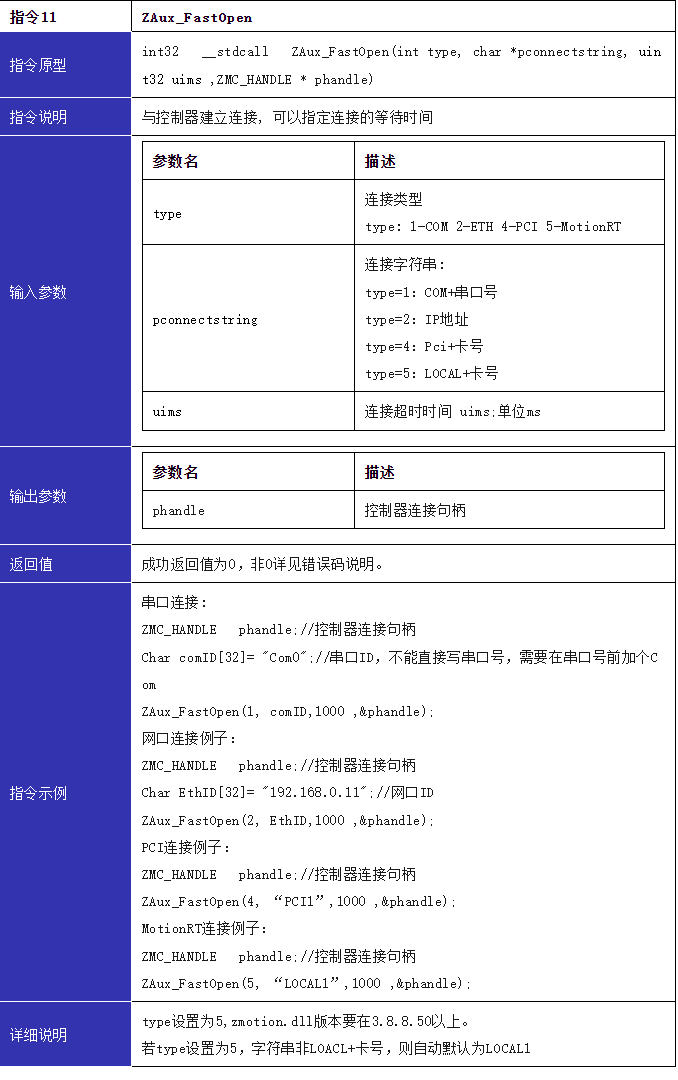
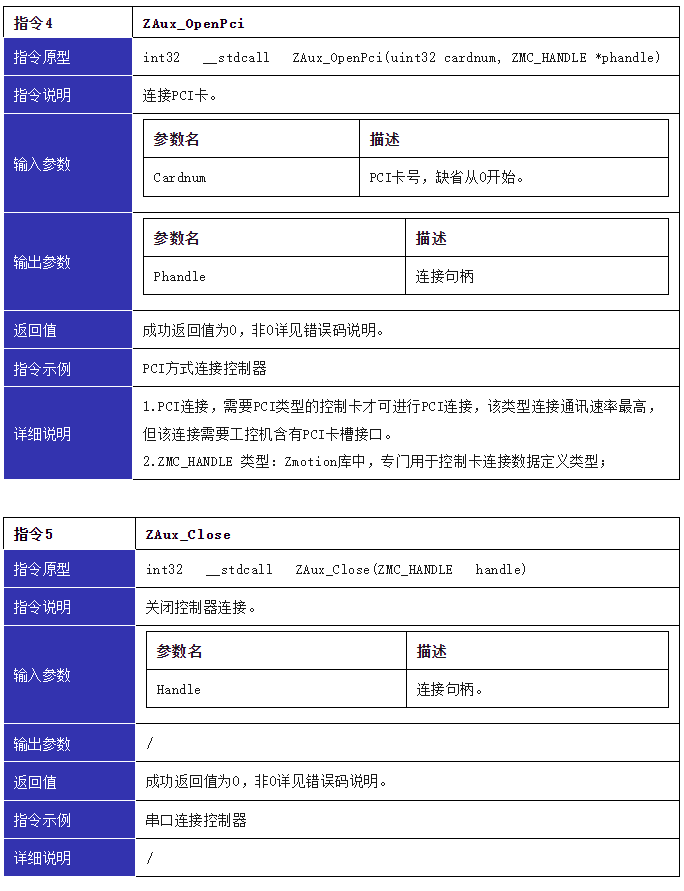
要想通過上位機操控控制器,就必須先連接控制器,上位機連接控制器的接口有四種,分別是網(wǎng)口連接、串口連接、PCI和LOCAL連接。
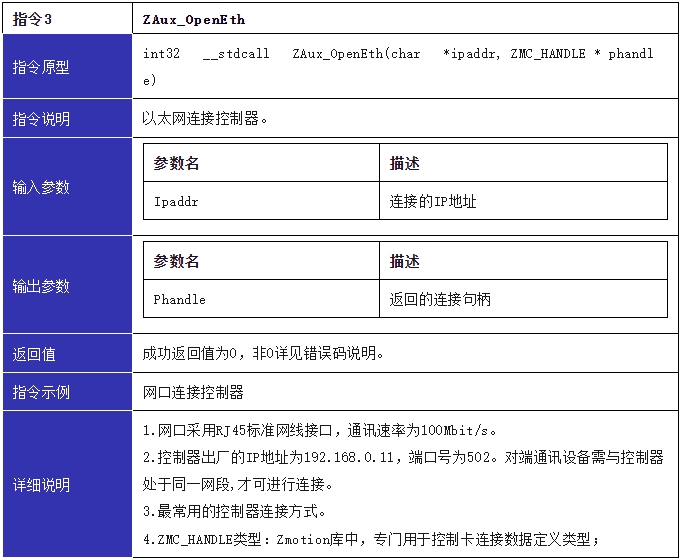
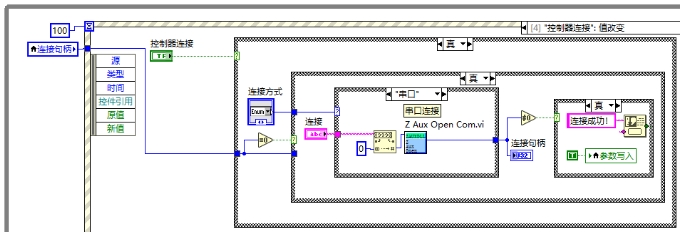
網(wǎng)口鏈接
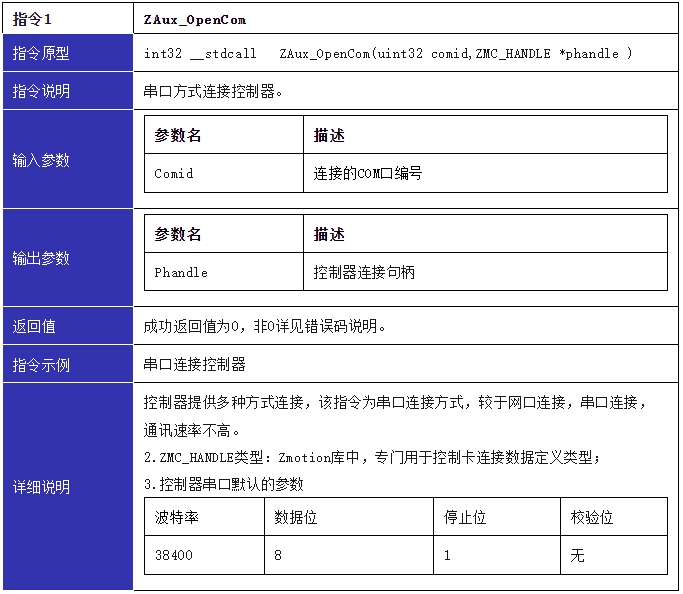
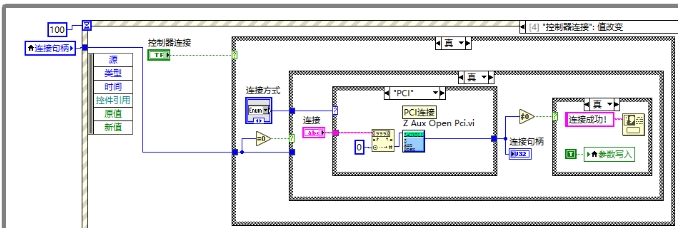
串口鏈接
PCI鏈接
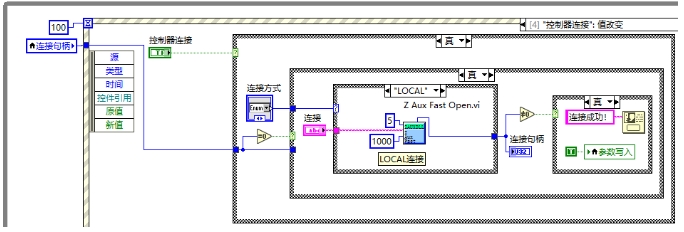
LOCAL鏈接
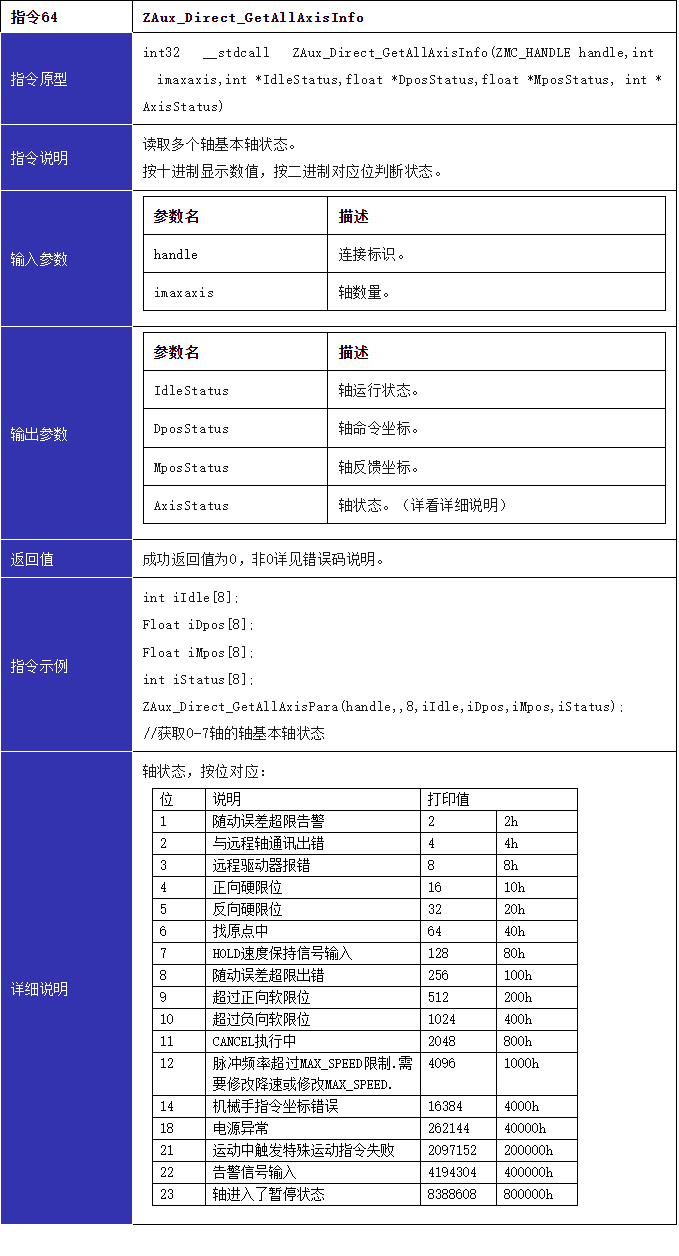
??? 讀取多個軸軸參數(shù)和控制器型號
相關PC函數(shù)介紹。
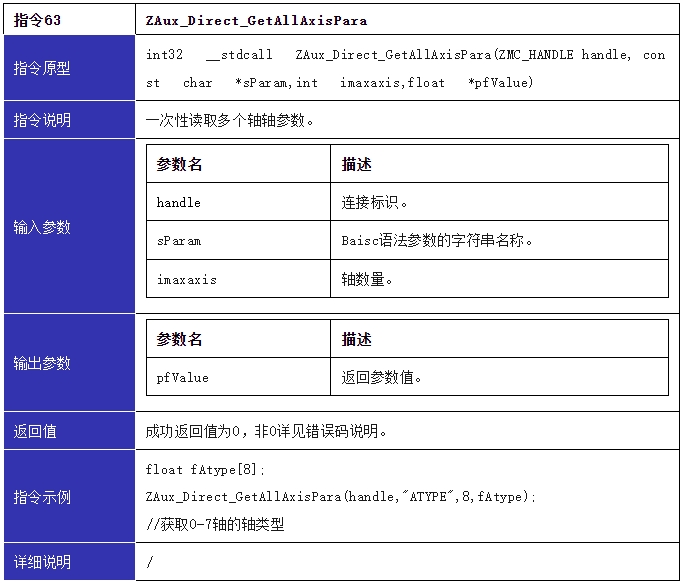
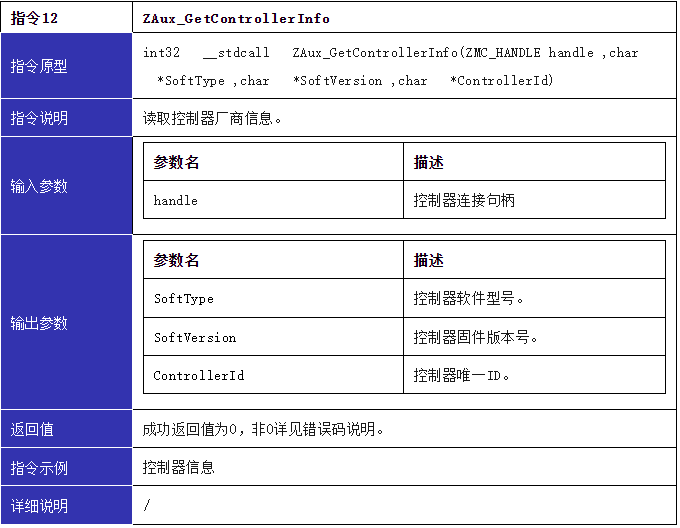
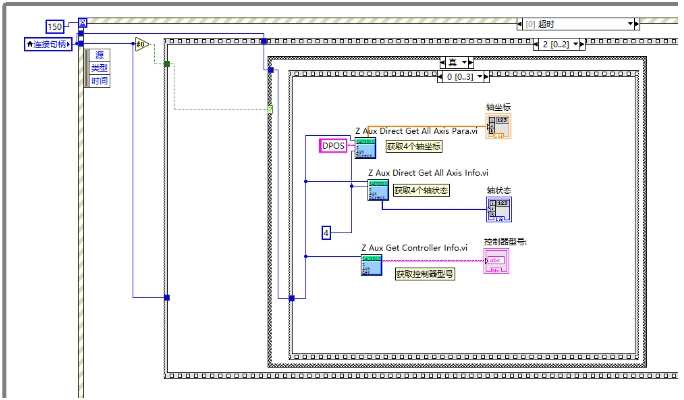
鏈接控制器后,通過定時獲取軸坐標、軸狀態(tài)和控制器型號。
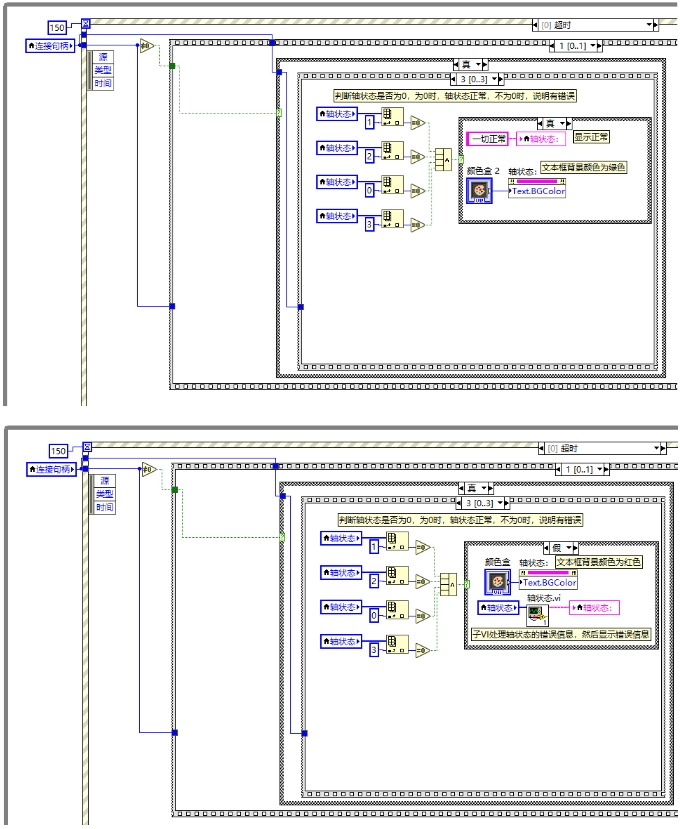
獲取軸坐標、軸狀態(tài)和控制器型號的程序框圖。
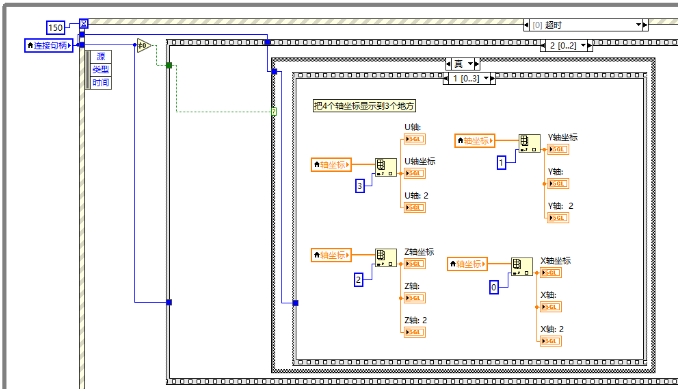
把軸坐標顯示到界面上。
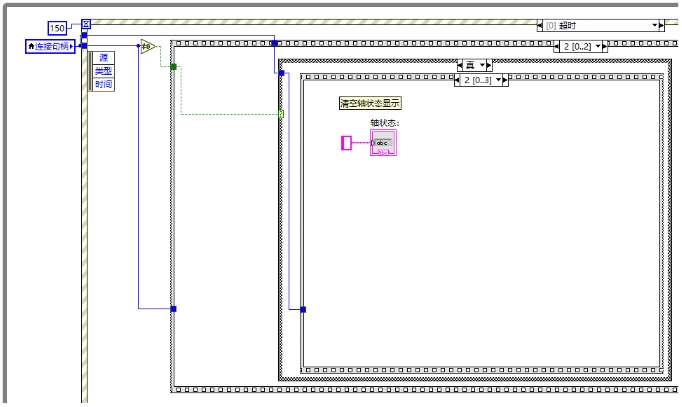
更新軸狀態(tài)前,清空界面的軸狀態(tài)顯示。
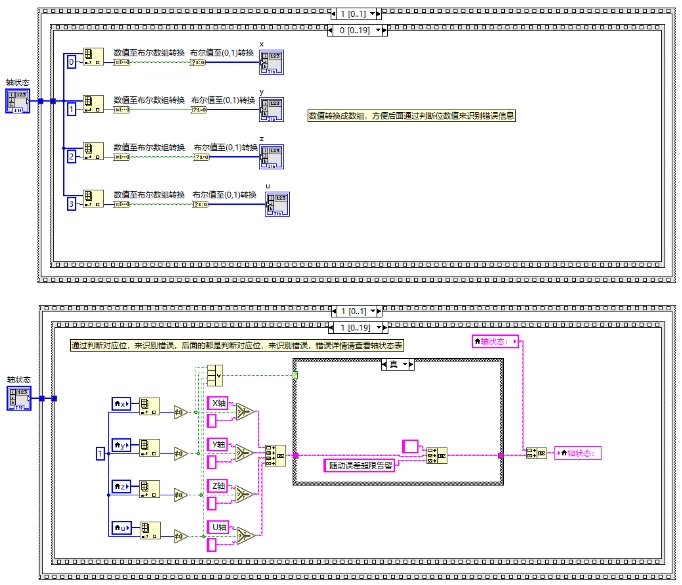
判斷軸狀態(tài),軸狀態(tài)有錯誤就處理錯誤信息并顯示出來。
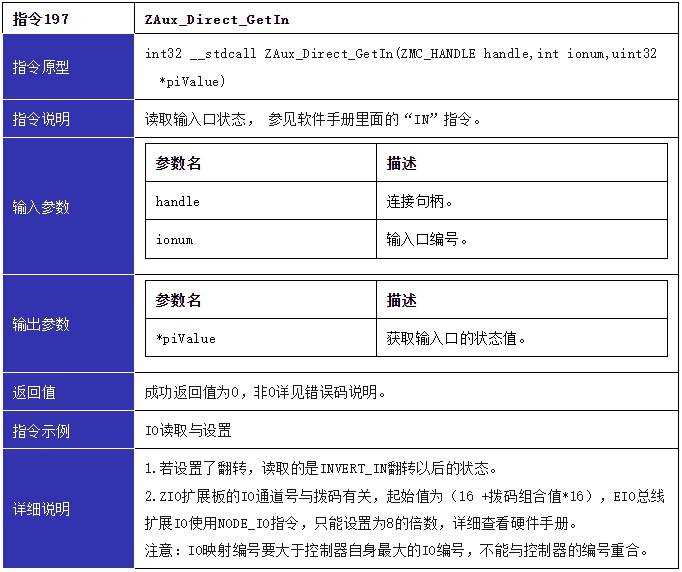
軸狀態(tài)子VI把軸狀態(tài)數(shù)值轉換成數(shù)組,通過判斷位數(shù)值來識別錯誤信息。

??? LabVIEW進行IO控制
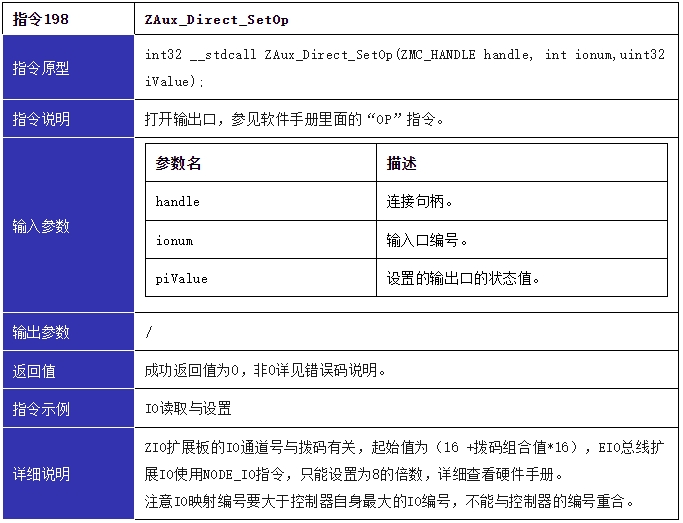
相關PC函數(shù)介紹。
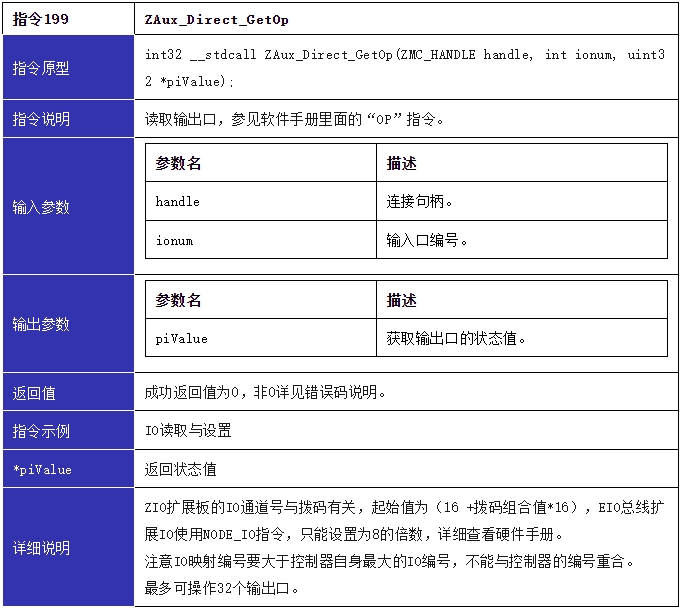
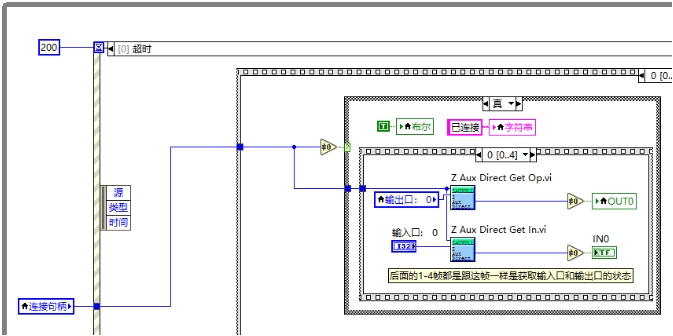
輸入輸出口的監(jiān)測與控制。

(1)定時獲取輸出口和輸入口狀態(tài)的程序框圖。
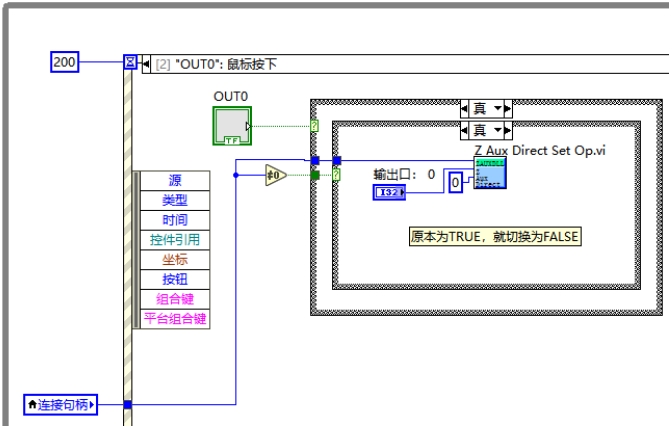
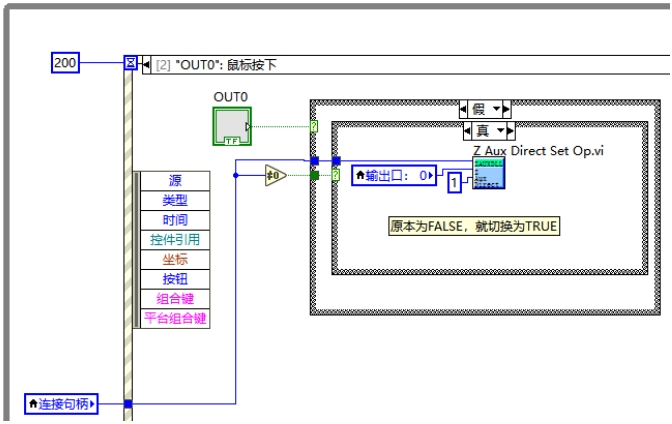
(2)切換輸出口狀態(tài)的程序框圖。
??? LabVIEW進行Basic下載
相關PC函數(shù)介紹。
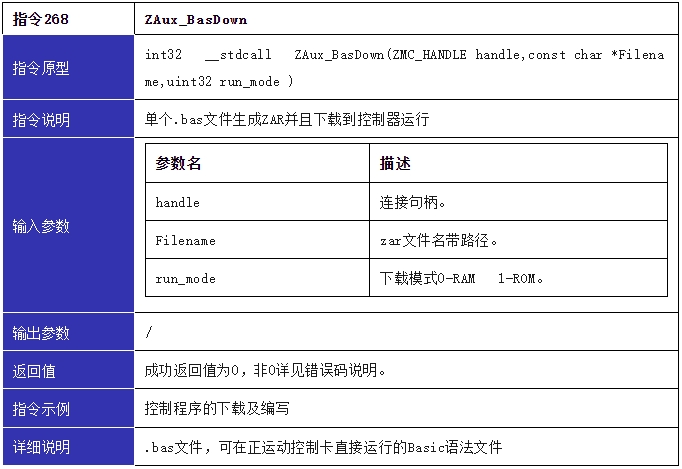
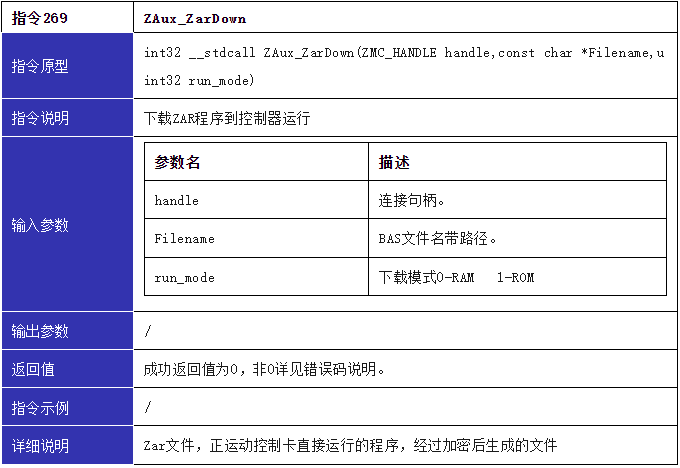
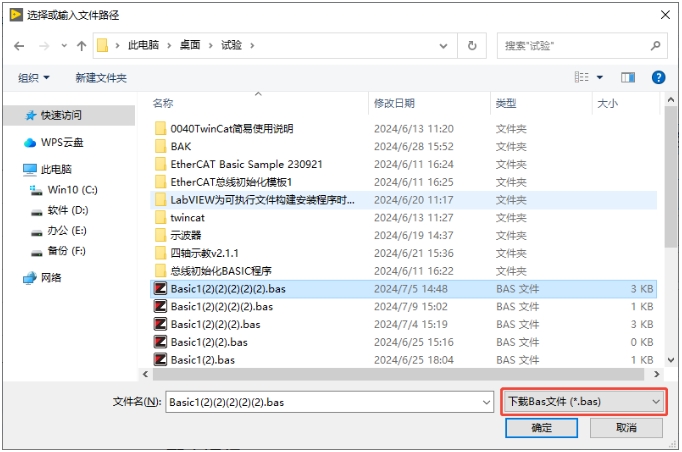
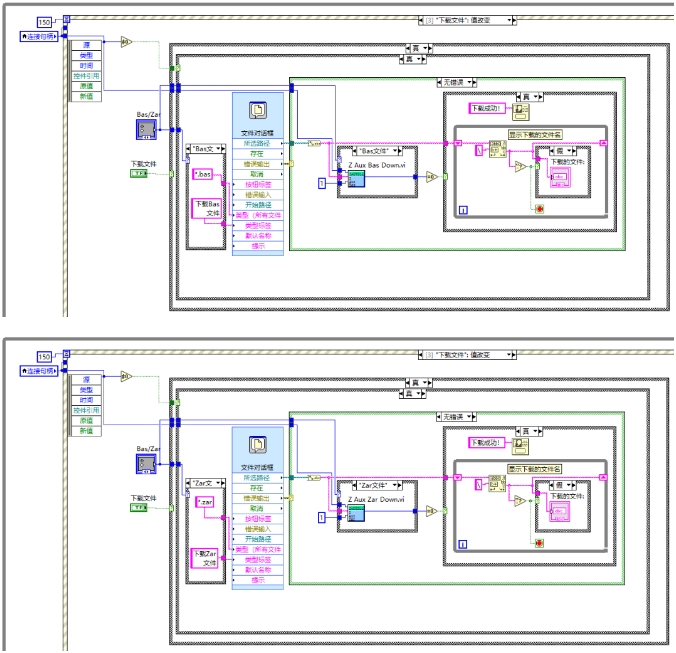
把Bas/Zar文件下載到控制器。
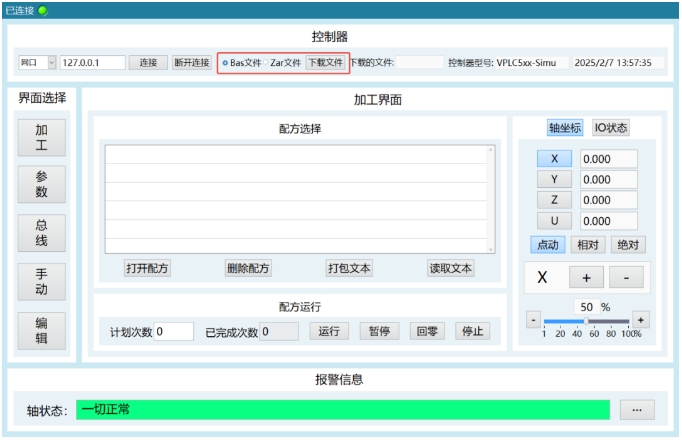
點擊下載文件,會根據(jù)選擇文件的類型選項進行彈窗,然后就可以選擇要下載的文件。
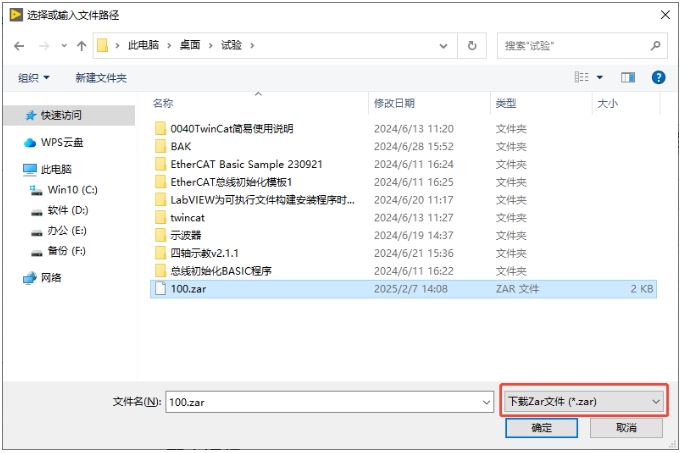
選擇Bas/Zar文件下載到控制器的程序框圖。
??? LabVIEW進行軸參數(shù)設置
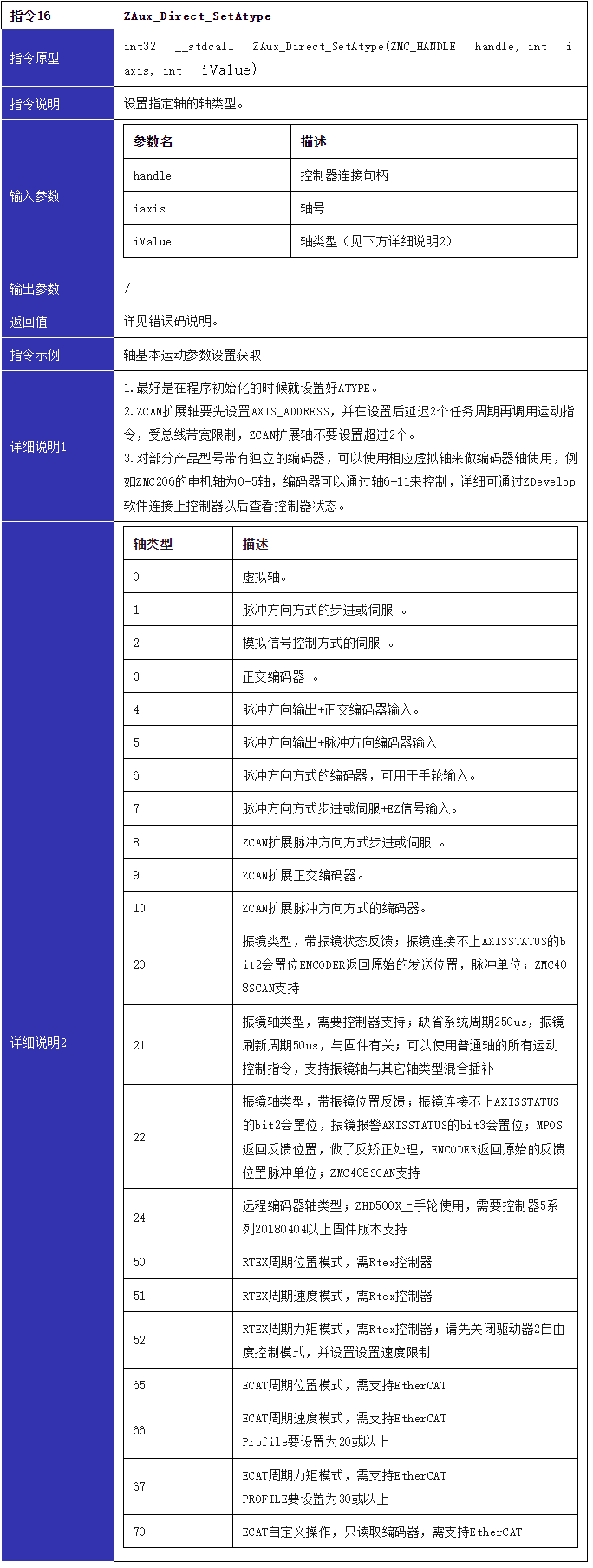
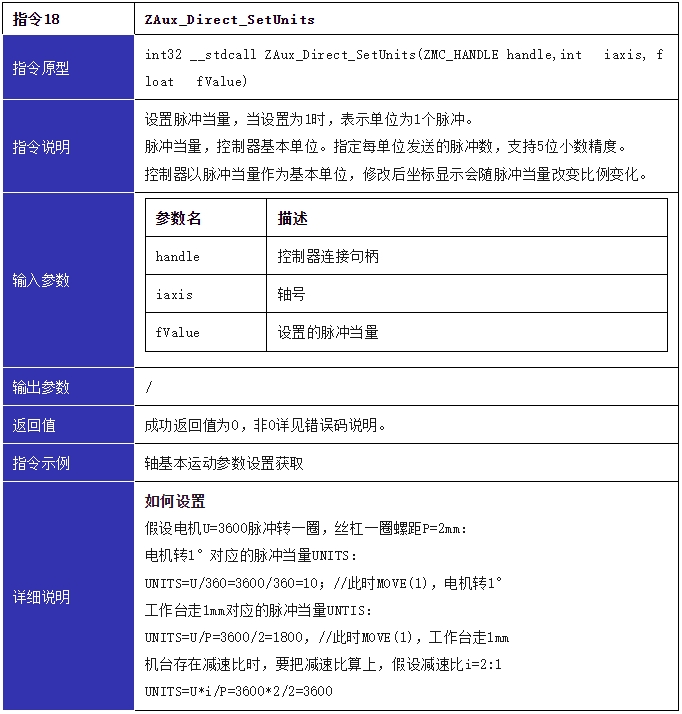
1.相關PC函數(shù)介紹
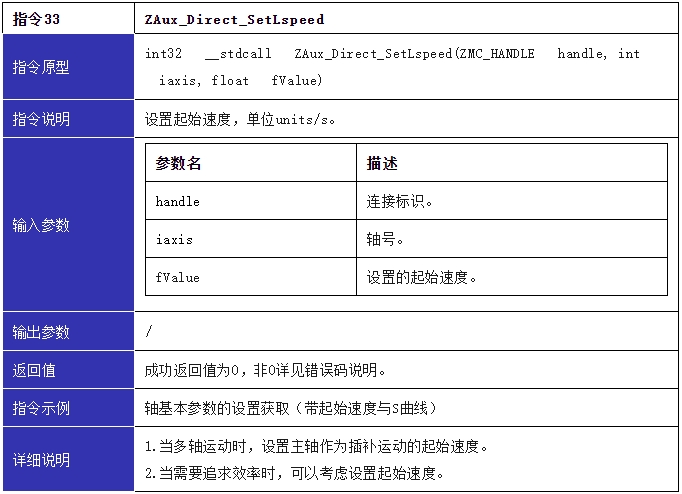
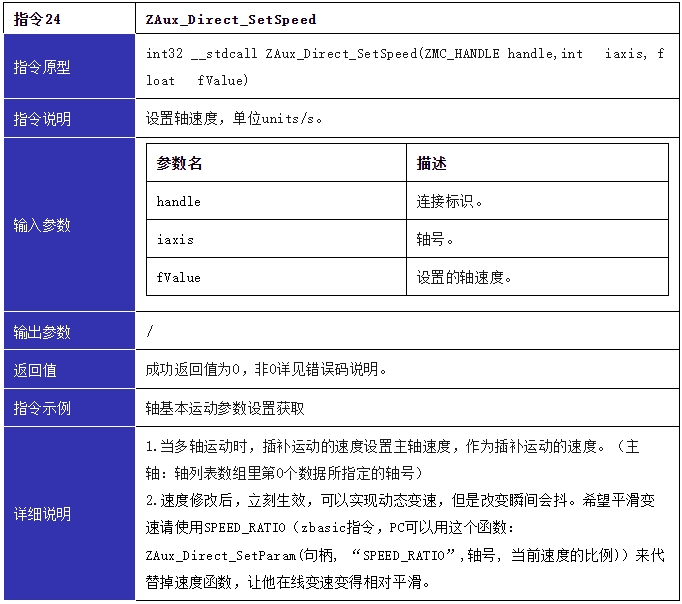
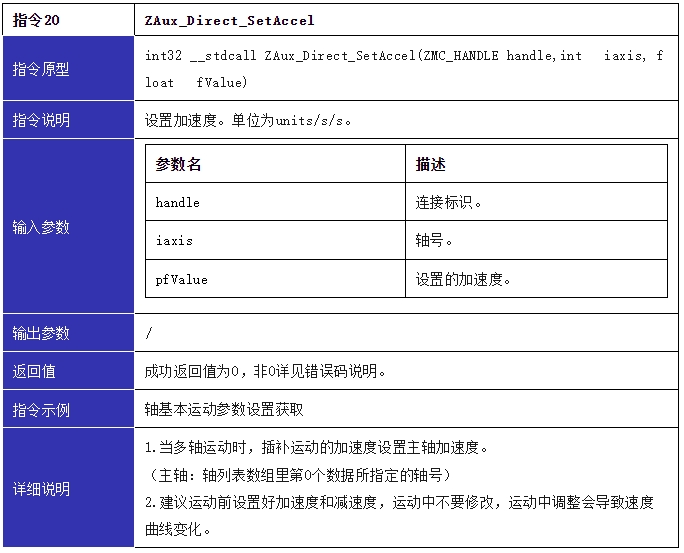
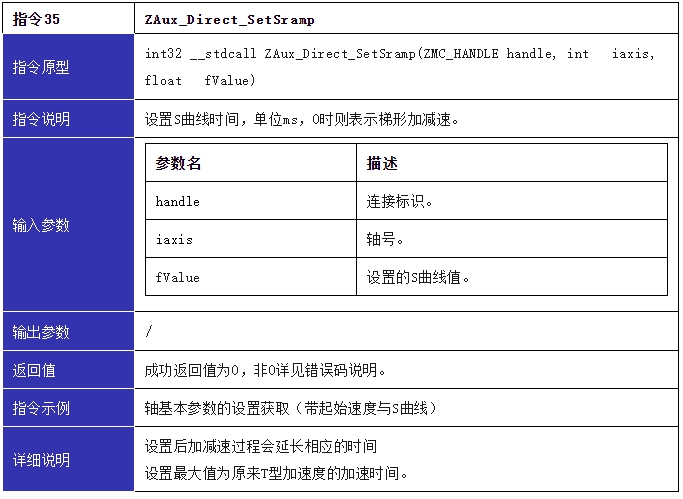
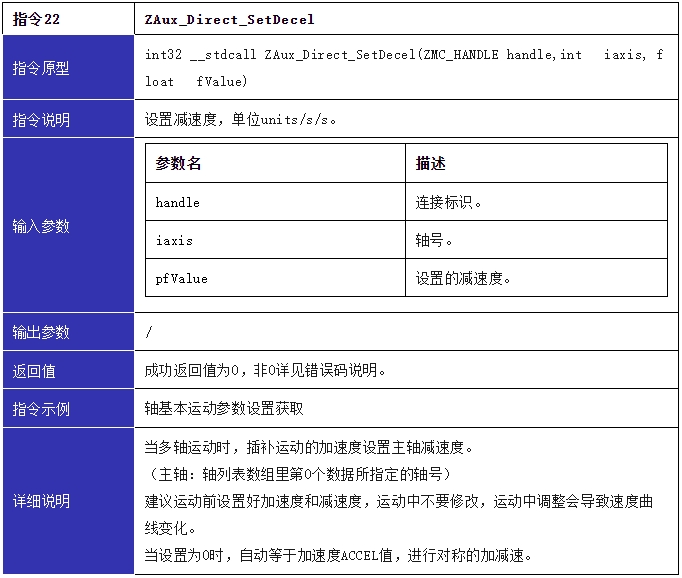
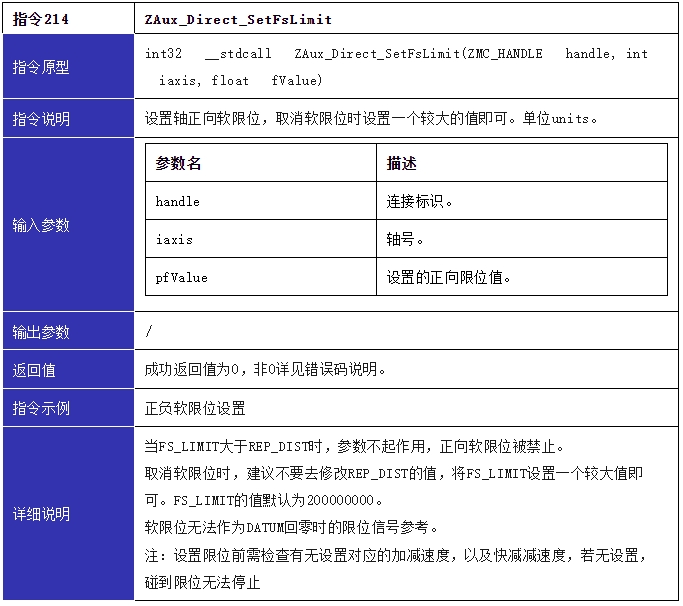
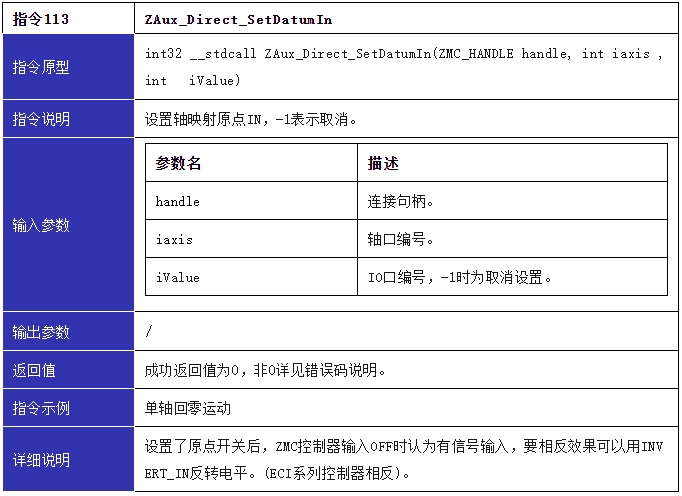
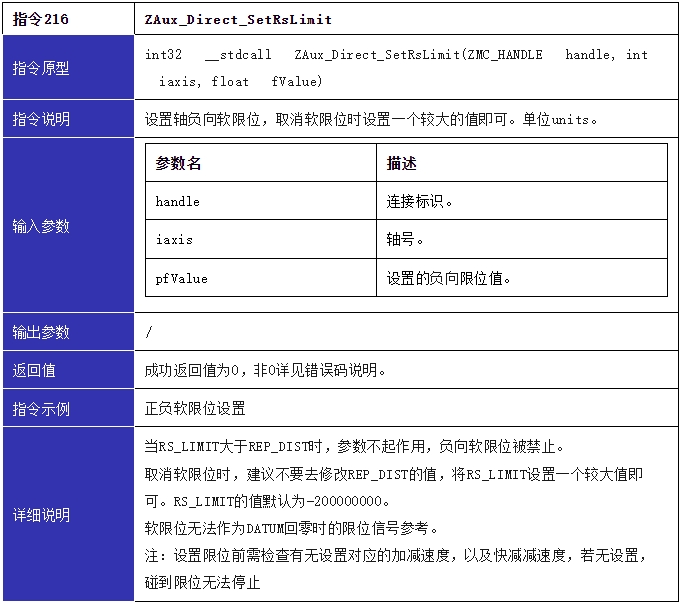
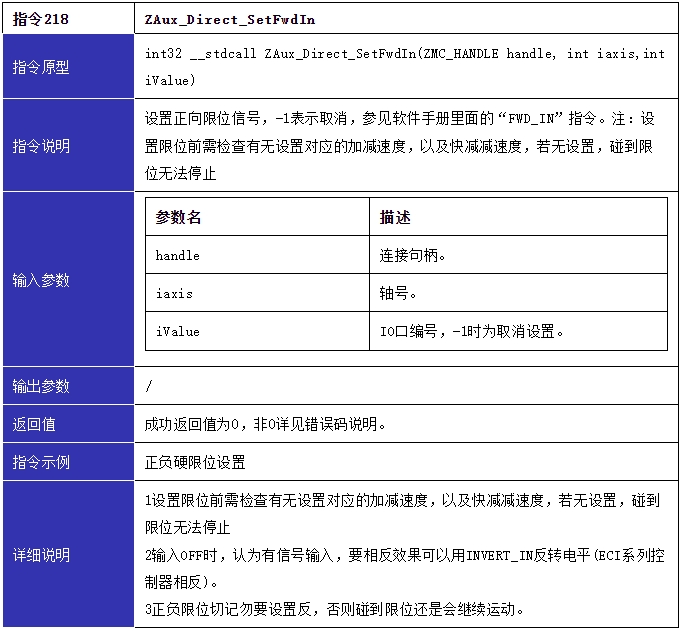
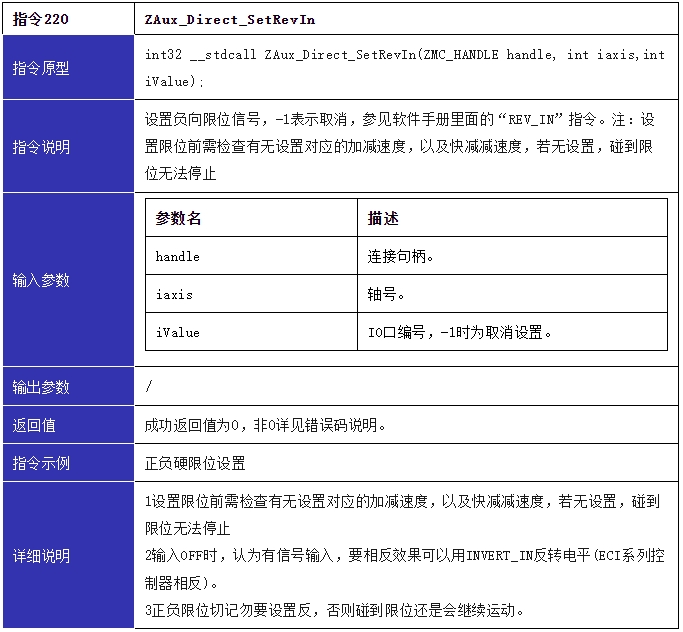
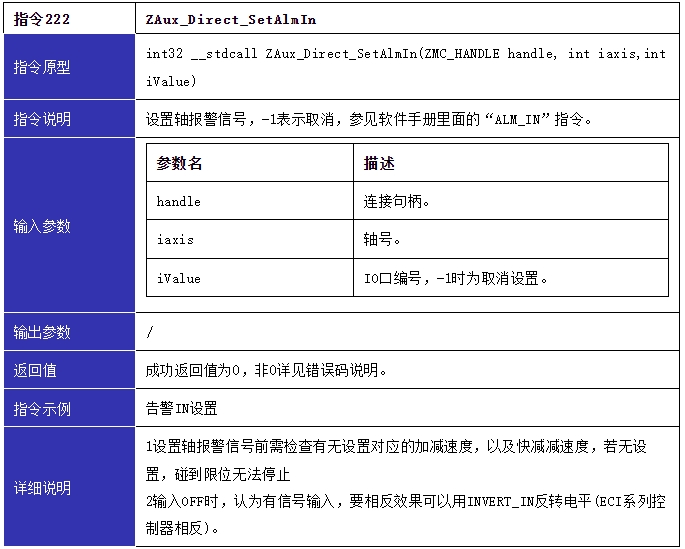
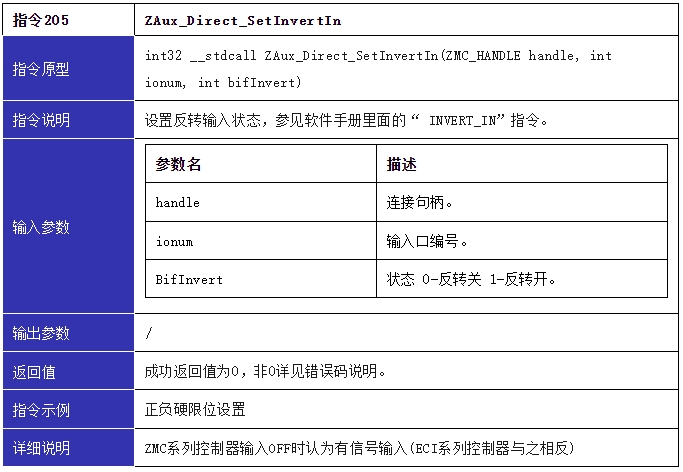
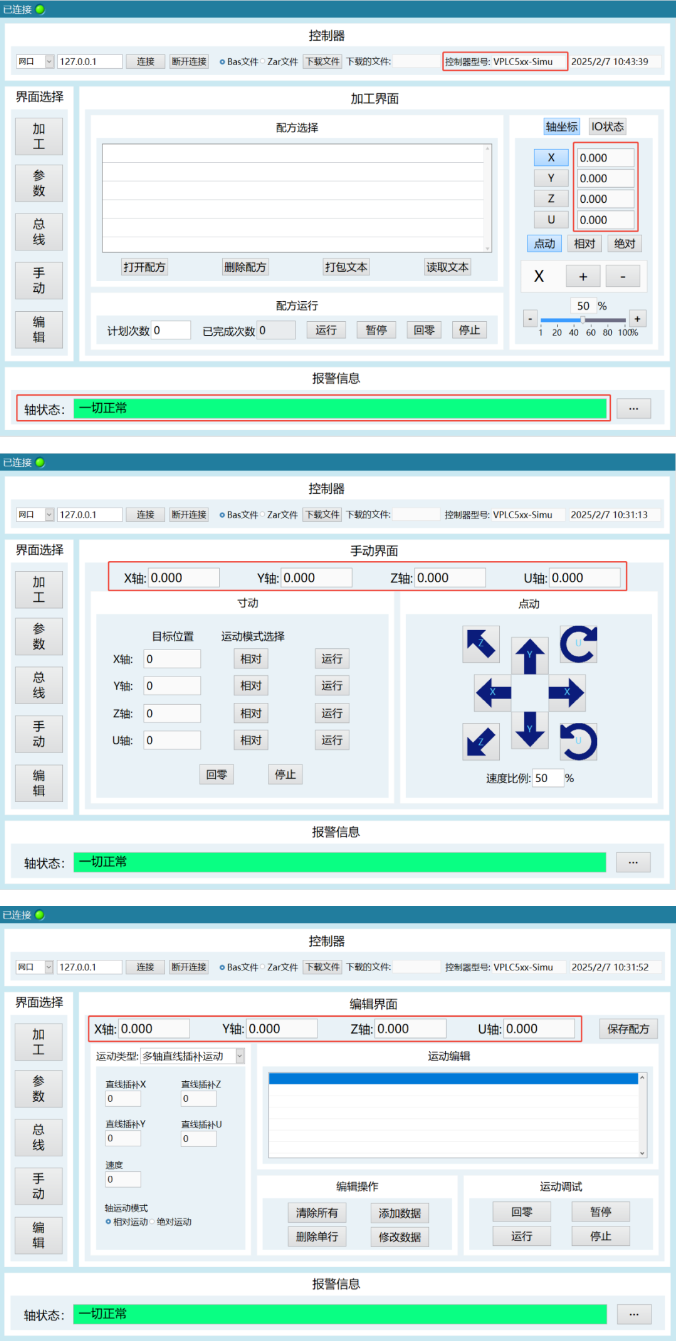
2.軸參數(shù)設置界面

(1)成功連接控制器后,還使能參數(shù)寫入布爾,然后超時事件根據(jù)進行一次軸參數(shù)初始化設置。
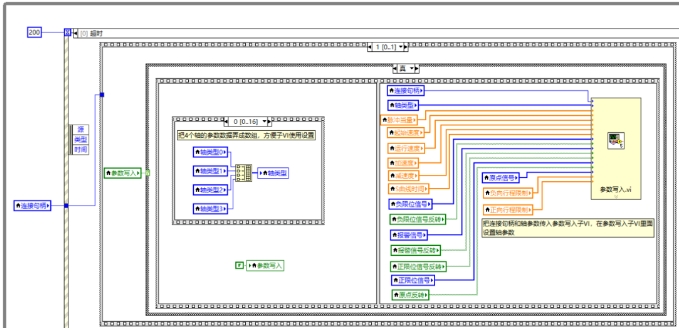
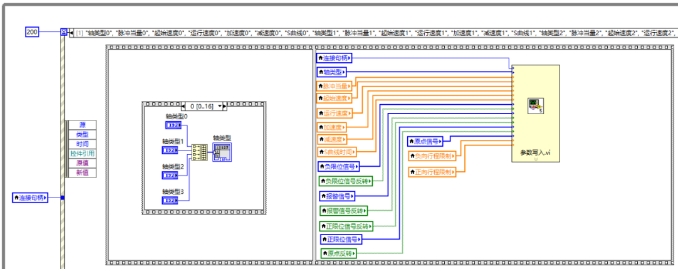
(2)在參數(shù)界面修改軸參數(shù)數(shù)值,會自動設置軸參數(shù)。
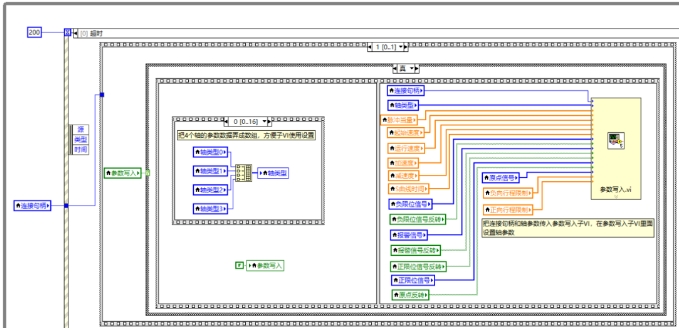
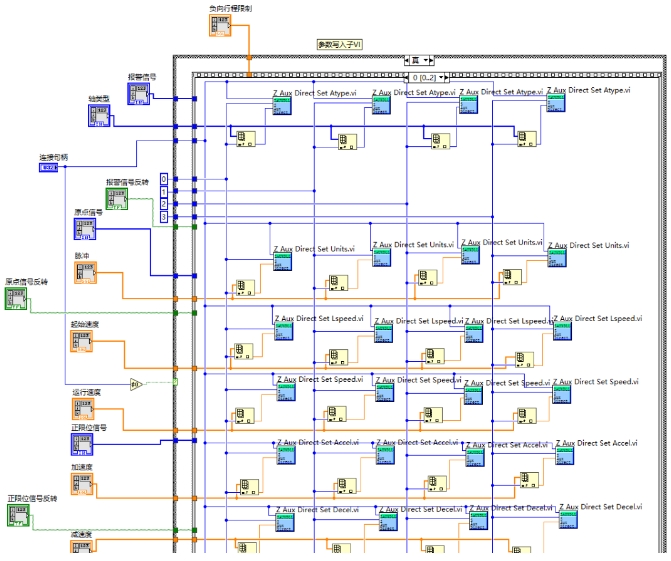
(3)參數(shù)寫入子VI。
3.教學視頻可點擊→“LabVIEW運動控制(二):EtherCAT運動控制器的多軸示教加工應用(上)_”查看。
完整代碼獲取地址
▼

本次,正運動技術LabVIEW運動控制(二):EtherCAT運動控制器的多軸示教加工應用(上),就分享到這里。
本文由正運動技術原創(chuàng),歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術企業(yè)。正運動技術匯集了來自華為、中興等公司的優(yōu)秀人才,在堅持自主創(chuàng)新的同時,積極聯(lián)合各大高校協(xié)同運動控制基礎技術的研究,是國內(nèi)工控領域發(fā)展最快的企業(yè)之一,也是國內(nèi)少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業(yè)。主要業(yè)務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統(tǒng)_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等。
審核編輯 黃宇
-
LabVIEW
+關注
關注
1995文章
3670瀏覽量
333063 -
運動控制器
+關注
關注
2文章
444瀏覽量
25139 -
EtherCAT總線
+關注
關注
5文章
80瀏覽量
5642 -
正運動技術
+關注
關注
0文章
118瀏覽量
604
發(fā)布評論請先 登錄





脈沖全閉環(huán)EtherCAT運動控制器的固件升級



EtherCAT運動控制器上位機開發(fā)之Python+Qt(二):回零# 正運動技術# 運動控制器# 運動控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論