 無人機載合成孔徑雷達系統研制手記(四):實測效果及原理圖下載
無人機載合成孔徑雷達系統研制手記(四):實測效果及原理圖下載
“一起來看看實測的效果。”

測量  在ArduPilot Mission Planner中配置任務
在ArduPilot Mission Planner中配置任務
任務已通過 ArduPilot Mission Planner 預先編程設定。無人機將自動飛越預設航點,任務中還包含設置ROI(關注區域)的命令以確保天線始終指向該區域,并通過任務中的 digicam 配置命令啟動雷達測量。該命令原本用于配置普通相機,但我對雷達微控制器進行了編程,使其能夠響應此命令。利用現有命令可輕松實現雷達與現有 ArduPilot 軟件的協同工作。
為實現聚光燈成像模式所需的 ROI 設置,需要對 ArduPilot 固件進行補丁修改。默認情況下無人機頭部始終指向 ROI,而無法配置為僅天線指向 ROI。該補丁已作為 PR 提交至 ArduPilot 的 Github 倉庫。

飛行中的無人機
場景為一片開闊的野外場地。在天線指向方位約1.5公里外可見森林邊緣。無人機以5米/秒的速度沿直線飛行,保持110米高度,航程約500米。雷達參數設置為:僅發射VV極化波,掃描時長400微秒,工作帶寬500 MHz,脈沖重復頻率1 kHz。 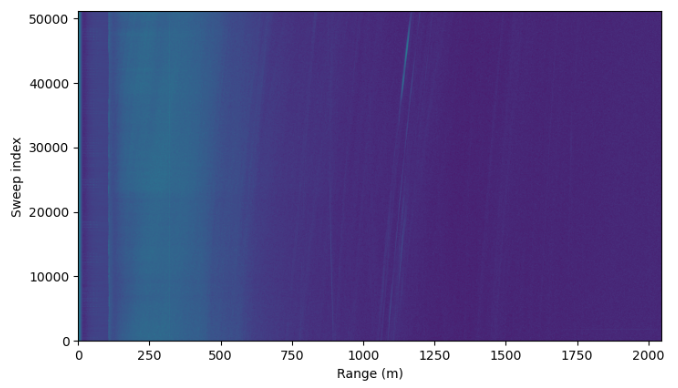 范圍壓縮原始數據
范圍壓縮原始數據
距離壓縮(傅里葉變換)后的采集數據看起來并不直觀。由于天線波束較寬,每次掃描會捕獲不同角度的多個目標,因此數據并不呈現傳統圖像形態。
在零距離處存在顯著的發射-接收(TX-RX)泄漏響應,隨后在100米處可見地面反射信號。盡管天線正下方的增益遠小于波束中心,但由于反射角度和近距離效應,正下方的反射信號依然非常強烈。在較大的距離上,反射信號大多低于單次掃描的噪聲水平。然而,在圖像形成過程中,會將多次掃描的數據進行整合,這樣可以提高信噪比,從而使得遠處的一些目標也能夠在最終形成的圖像中顯現出來。某些大型孤立物體清晰可見,其與雷達的距離會隨著無人機運動產生變化。
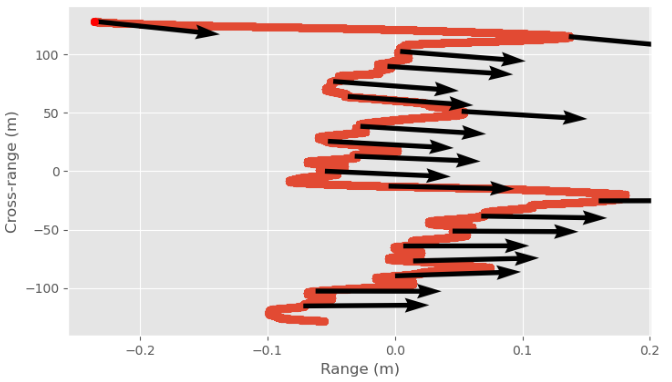
通過 GPS 和 IMU 記錄的無人機位置和天線指向矢量
理想情況下,飛行軌跡應為直線,但由于風力等環境因素存在一定擾動。該無人機重量極輕,即使微風也容易對其飛行姿態產生影響。由于感興趣區域(ROI)設置距離較遠,測量過程中天線指向方向僅產生數度的微小變化。
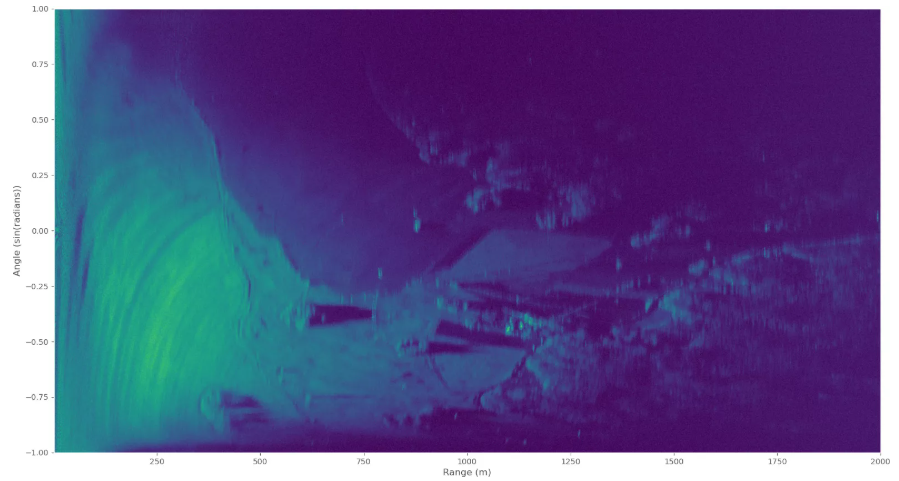
未聚焦的 SAR 圖像
上圖展示了未經自動聚焦處理的SAR圖像,該圖像基于成像算法內部使用的偽極坐標系生成。所謂"偽極坐標"是指其角度軸采用弧度的正弦值而非直接弧度值,這種坐標系在計算效率上略優于常規極坐標系。該圖像由51,200次掃描數據合成,分辨率達到6000×20000像素。
相較于原始數據,處理后的圖像質量可謂天壤之別。雖然各類地形特征已清晰可辨,但由于采用極坐標形式,與常規地圖的直觀對比仍存在困難。

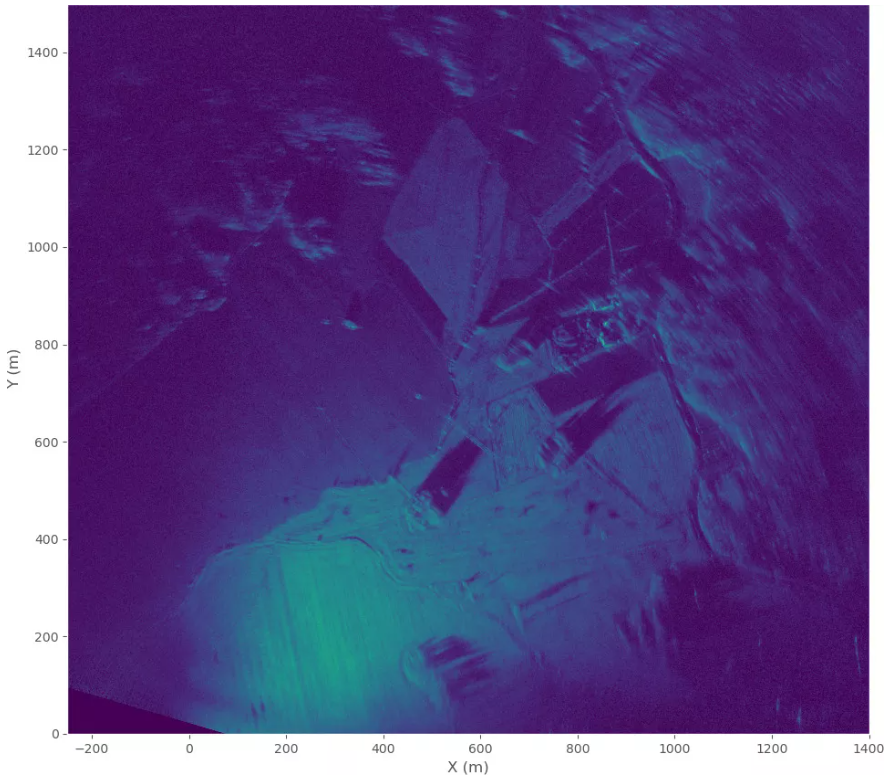
未聚焦的 SAR 圖像
通過將偽極坐標圖像投影至笛卡爾網格,可獲取笛卡爾坐標系圖像。相較于直接在笛卡爾網格上成像,這種投影轉換具有顯著的速度優勢。基于無人機電子羅盤的方位測量數據,圖像已進行北向校準處理。由于旋轉校正操作,圖像左角存在小范圍數據缺失。
當前成像結果仍存在明顯模糊現象。這表明僅依賴GPS和慣性測量單元(IMU)的定位精度尚不足夠,需通過自聚焦算法優化處理才能獲得高清晰度的聚焦圖像。
自動聚焦的 SAR 圖像
經過30次最小熵梯度優化自聚焦迭代處理后,圖像質量顯著提升。盡管五次迭代可能已足夠收斂,但增加迭代次數仍能略微提升成像效果。由于每次迭代均需執行反投影算法的前向與反向計算,該處理過程耗時數分鐘。
受低入射角影響,樹木等高大物體在圖像中投射出長陰影。圖像振幅未進行歸一化處理,因此靠近坐標原點的區域呈現較高亮度。天線輻射方向圖特征在圖像中亦有明顯體現:波束中心略微右傾,而圖像左側區域因偏離波束中心導致天線增益顯著降低,故該區域亮度較低。
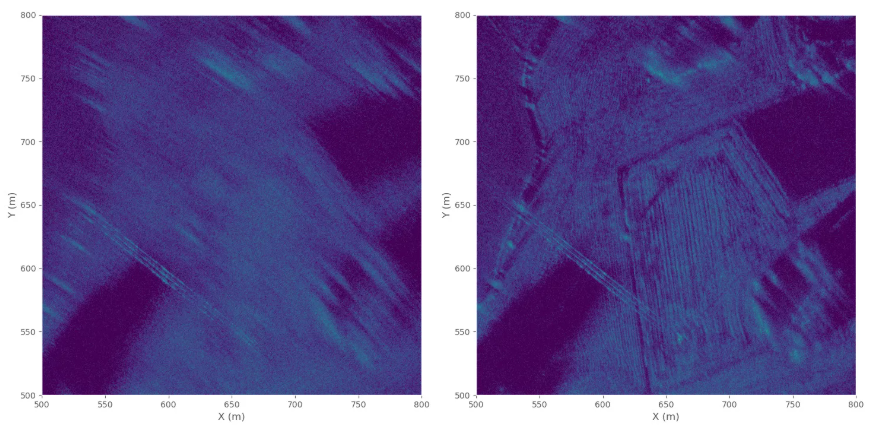
合成孔徑雷達圖像細節對比。無自動對焦(左)和使用最小熵優化自動對焦(右)
放大觀察處理后的雷達圖像可見豐富細節。對比300×300米區域的自動聚焦處理效果可見,經優化的圖像能清晰呈現農田地表細節,而未進行自聚焦處理的圖像該區域僅呈現模糊影像。
嘗試采用相位梯度自聚焦算法時,其處理效果欠佳,所得圖像質量與未進行自聚焦處理的原始圖像基本相當。
圖像左下角的三條線性特征對應高壓輸電線。此類目標僅在雷達波束與其呈90度正交角時具備可探測性,其他入射角度下因反射率過低而無法成像。
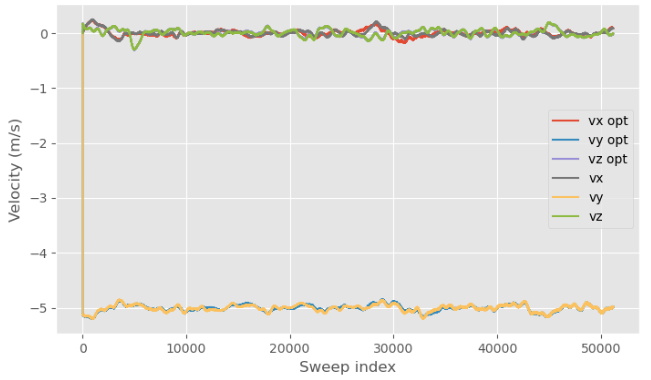
原始及優化后的速度
對比優化處理前后的無人機飛行速度參數可見,各方向速度分量的調整幅度并不顯著。其中沿軌跡方向與距離方向的速度分量均呈現小幅調整,而高度方向速度分量基本維持不變。
全極化測量

SAR成像區域的谷歌地圖衛星截圖
在另一地點采用全極化模式(四種極化組合)進行了補充測量。雷達系統仍沿自主規劃的直線航跡飛行,但此次快速切換四種極化狀態。掃描時長縮短至200微秒,各極化通道的脈沖重復頻率保持715赫茲,其余參數與前期實驗一致。成像處理仍采用 51,200 次掃描數據。
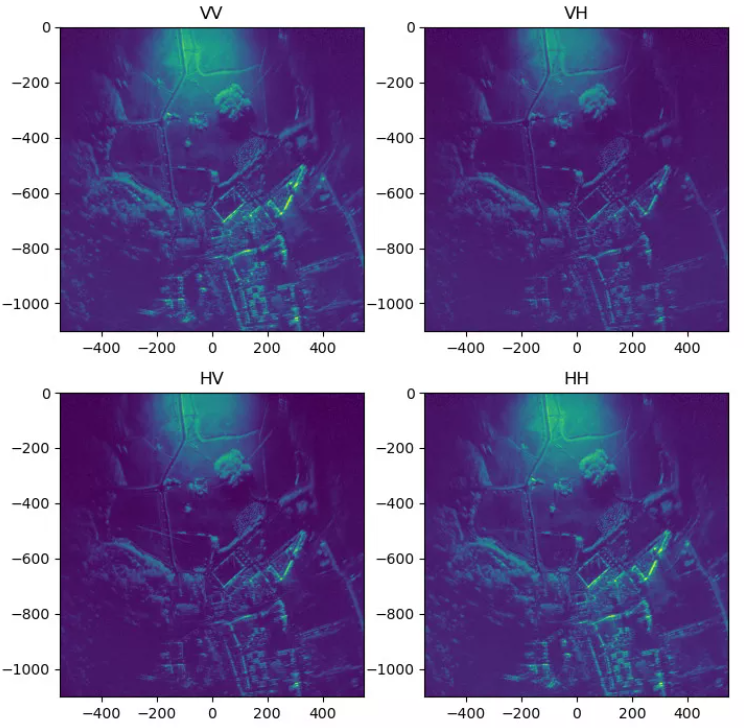
四種極化模式下的SAR圖像對比
四組極化圖像呈現高度相似性,主要差異體現在交叉極化圖像(HV與VH)的振幅較弱,這源于目標對交叉極化信號的反射率普遍低于同極化分量。
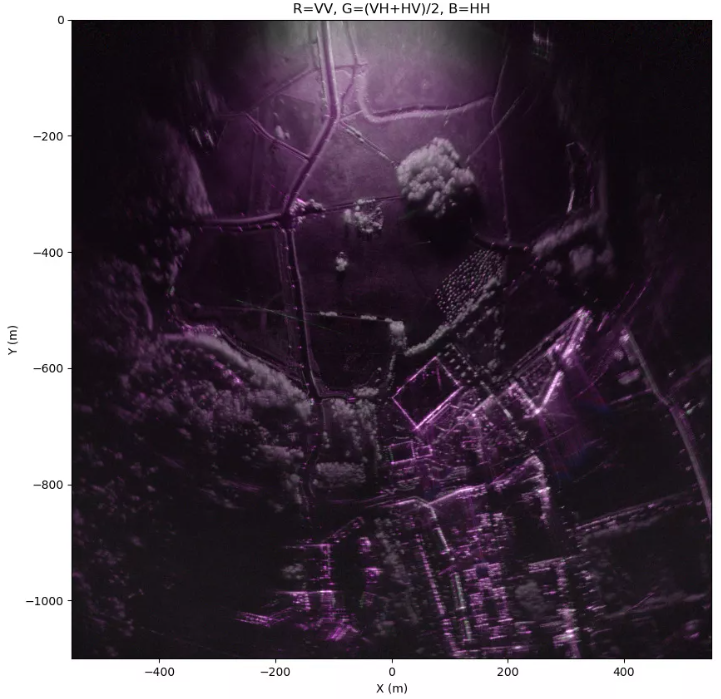
極化合成SAR圖像(經自聚焦處理)
不同于單獨顯示各極化圖像,常規做法是將不同極化信息映射至RGB顏色通道進行融合顯示。該彩色合成圖像能直觀反映目標對不同極化電磁波的反射特性:地面區域呈現紫色調,表明其對VV和HH極化波的反射優于交叉極化分量;建筑物及道路沿線燈桿亦呈現類似特征;森林區域顯示為白色,說明其對各極化波的反射強度基本相當。由于未對天線方向圖效應及各極化切換狀態的通道差異進行校準,部分觀測差異可能源自硬件特性。更高精度的測量需實施系統校準。
圖中(200, 500)米坐標區域密集點狀特征對應一處園藝區,其內每棵小型樹木均圍有金屬絲網結構。

SAR圖像中位于(-50, -80)米坐標處的地面實景照片(朝向負Y軸方向)
測量期間地表覆蓋少量積雪。該可見光照片拍攝視角與SAR圖像頂部俯視方向一致。圖中左側的小片樹林對應SAR圖像中部的樹叢區域。
視頻SAR成像
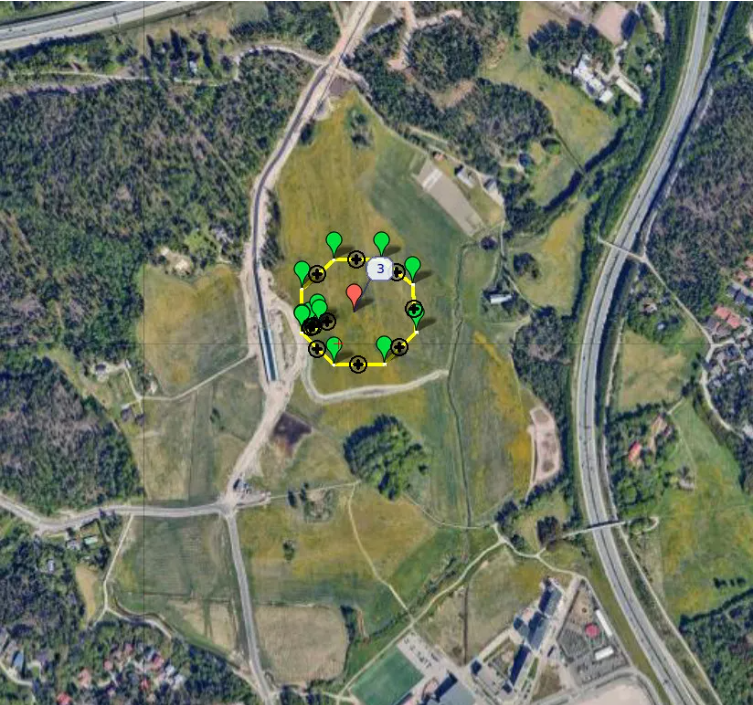
無人機執行八角形航跡的航點規劃,紅色標記為天線指向的感興趣區域(ROI)
此前的測量通過長基線數據合成了單幅高分辨率圖像。而通過單次長時測量獲取多段短基線數據,可生成多幅連續圖像并進一步合成視頻序列。
反投影算法對飛行軌跡無線性要求,因此本次實驗編程控制無人機沿八角形航跡飛行,并保持天線始終指向八角形中心。
每幀圖像由1024次雷達掃描數據生成,其中512次掃描與前幀數據重疊。由于單幀數據量少于全分辨率圖像,視頻幀的噪聲水平較高且角分辨率有所下降。視頻播放速度約為實際速率的10倍。采用全極化模式,色彩編碼方案與前述極化SAR圖像一致。
各幀獨立進行自動聚焦處理且未實施幀間配準,導致視頻中偶現輕微抖動或跳變現象。八角形航跡的拐角區域對成像算法挑戰較大,需同時精確解算沿軌與跨軌方向的位置信息以保障圖像質量。由于各幀基線長度存在差異(僅掃描次數相同),不同幀間的角分辨率可能有所波動。
自然目標(如地面與森林)在各幀中表現穩定,但視頻中可觀察到若干強反射現象:例如橋梁與輸電線在雷達波束正交時產生顯著回波。橋梁護欄的閃爍效應形成移動亮斑。不同極化通道的天線方向圖差異亦可見于目標色彩變化——同一目標在波束中心與邊緣區域可能呈現輕微色差。
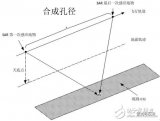
成像幾何關系
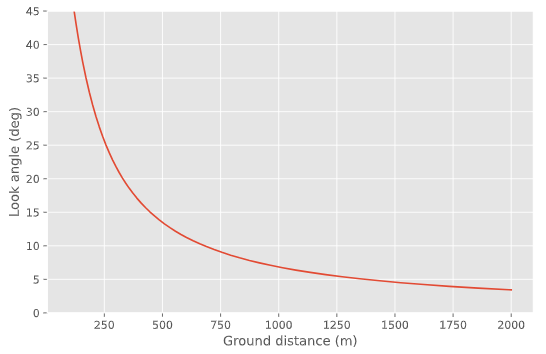
飛行高度120米時的雷達入射角
在無特殊許可情況下,無人機最大飛行高度限制為120米。SAR成像通常采用10至50度入射角。當入射角接近90度(垂直下視)時,反射功率較高,但鄰近目標的距離差異極小導致距離分辨率劣化。低入射角雖能提升距離分辨率,但受低掠射角影響,回波功率顯著降低。極端低入射角下的反射功率較常規45度入射角可能衰減10至20分貝,極大限制雷達探測距離。
另一關鍵問題是高大物體引發的陰影效應。例如,120米飛行高度下,2公里距離處的掠射角僅為3.4度。此時10米高的樹木將投射長達170米的陰影,完全遮蔽其后方的地面回波。所有測量數據中均清晰呈現此現象,尤其在極化測量中,遠距離處僅能識別建筑物頂部結構。
結論
該合成孔徑雷達無人機系統成像距離至少可達1.5公里,若提升飛行高度探測范圍可進一步擴展。整套系統(含雷達、無人機及電池)總重不足1千克,具備HH、HV、VH、VV全極化測量能力。基于梯度最小熵的自聚焦算法配合非RTK級GPS與慣性測量單元(IMU)傳感器數據,即可利用寬波束天線獲取高質量成像。系統成本構成包括:無人機約200歐元,兩片雷達電路板600歐元,以及本人利用業余時間持續10個月的研發投入。考慮到系統的低成本,其性能表現令我十分滿意。
原文轉載自 https://hforsten.com/homemade-polarimetric-synthetic-aperture-radar-drone.html,已進行翻譯及校對優化 附:原理圖 PDF 下載: 
注意:如果想第一時間收到 KiCad 內容推送,請點擊下方的名片,按關注,再設為星標。
常用合集匯總:
和 Dr Peter 一起學 KiCad
KiCad 8 探秘合集
KiCad 使用經驗分享
KiCad 設計項目(Made with KiCad)
常見問題與解決方法
KiCad 開發筆記
插件應用
發布記錄
審核編輯 黃宇
-
無人機
+關注
關注
230文章
10714瀏覽量
185399 -
孔徑雷達
+關注
關注
0文章
8瀏覽量
5812
發布評論請先 登錄
合成孔徑雷達系統綜合測控器的研制
怎么實現合成孔徑雷達衛星電磁兼容設計?
合成孔徑雷達衛星
合成孔徑雷達的研究熱點解析
載合成孔徑雷達系統的接口實現與設計
合成孔徑雷達的工作原理_合成孔徑雷達的特點作用
合成孔徑的雷達研究熱點
機載合成孔徑雷達系統原理及FPGA的配置設計資料下載

合成孔徑雷達系統用于GP-GPU支持的輕型無人機
無人機載合成孔徑雷達系統研制手記(一):設計原理






 工商網監
工商網監
評論