 相機的成像原理及主要參數
相機的成像原理及主要參數
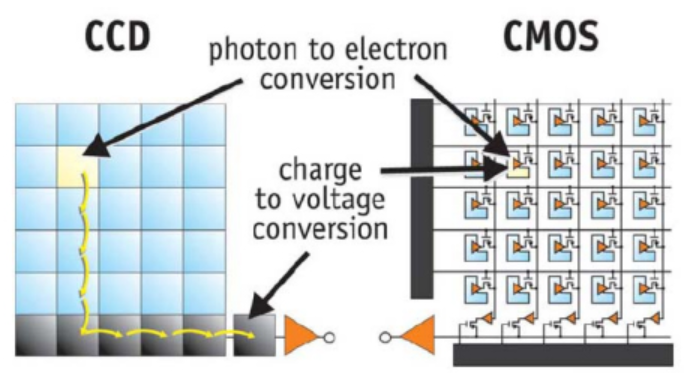
我們常見的相機芯片主要由硅材料組成,主要分為CCD和CMOS兩大類。他們主要是讀出方式的不同。相機成像原理如下,從光子到數字化圖片的過程——主要分為四個步驟:光子到電子的轉化、電子到電壓的轉換,模數轉換,后期處理。
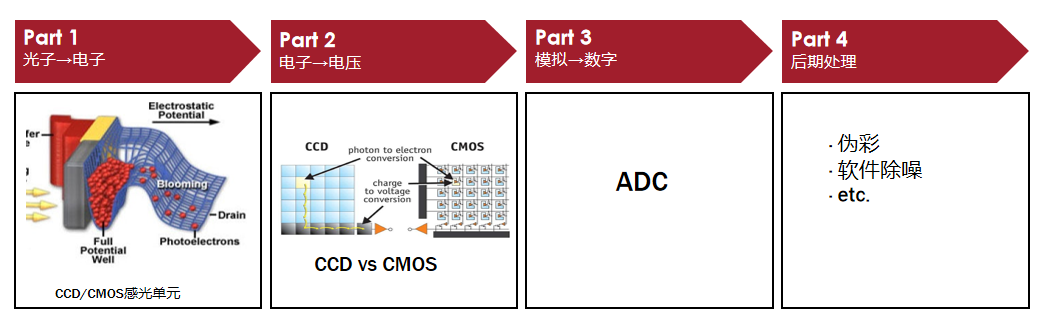
CCD與CMOS主要區別在于電子到電壓的轉換過程中,CCD是像素統一讀出,CMOS是每個像素單獨讀出。這一區別也決定了CCD和CMOS相機各有優劣。在過去,由于CCD的像素一致性好,占據大部分高端市場;近年來,CMOS芯片技術已取得巨大進步,在很多方面已超越CCD,從2010年開始sCMOS相機開始大規模商業化,憑借高速度(幀速率)、高分辨率(像素數)、低功耗以及最新改良的噪聲指數、量子效率及色彩觀念等各方面優勢,CMOS芯片逐漸在CCD芯片主導的領域里占據了一席之地。
相機主要參數
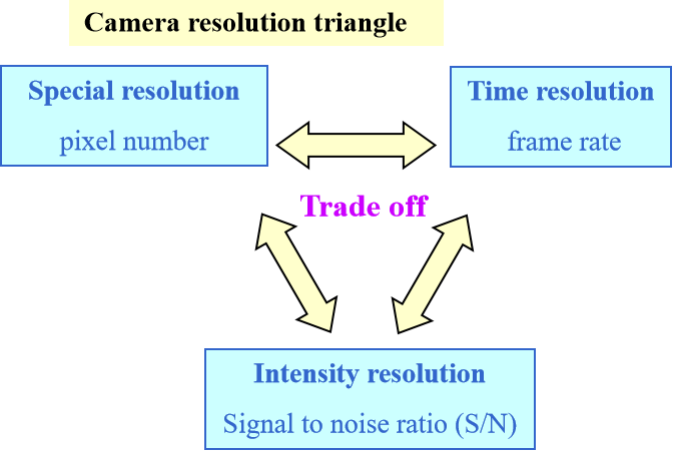
? 分辨率
相機的像素數目,也就是空間分辨力,分辨率越高,分辨樣品中的微小結構能力就越強。
? 幀數
對應的相機的時間分辨能力,相機每秒可以采集多少張照片,幀數越高獲得樣本信息越全。
? 靈敏度
對應強度分辨能力,也就是信噪比。
以上三個參數屬于魚和熊掌不能兼得,相互制約得關系。
? 噪聲
前面我們提到了靈敏度,也就是信噪比。通俗來講信噪比等于信號強度比上噪聲的比值,比值越大靈敏度越高,信噪比越好。
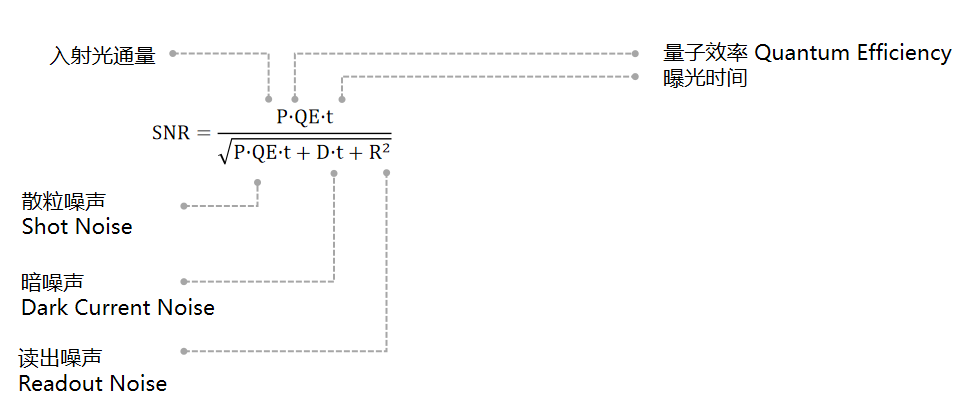
以上是信噪比的計算公式,其中主要包括三大類噪聲,散粒噪聲,暗噪聲,讀出噪聲。
1)散粒噪聲:散粒噪聲是信號本身的噪聲,屬于統計學上的噪聲,和真實信號的強度相關,如果是弱光探測,散粒噪聲可以忽略不計。
2)暗噪聲:暗噪聲是暗電流產生的散粒噪聲,主要由于像素感光材料熱電子運動產生。長時間曝光(積分)時,芯片溫度會增高,暗電流會越大,相應的暗噪聲會增大,這個時候暗噪聲對圖像質量的影響比較大,一般采用風冷和水冷方式進行制冷來降低暗噪聲。對于同一芯片,近似的規律是溫度每下降10度,暗電流減小一半。
3)讀出噪聲:讀出噪聲的來源是電子轉換成電壓的過程產生的,與幀數密切關,讀出速度越快讀出噪聲越高。值得注意的是如果曝光時間在1s以上,主要噪聲來源于是暗噪聲和信號的散粒噪聲。如果是1s以下的曝光時間,主要噪聲來源于讀出噪聲。
? 滿阱容量
每個像素可以容納的電子數。由傳感器決定,在強光條件下,高滿阱可防止圖像過曝。
? 位深
位深實際是灰度值表示,位深越大,圖片越精細。
? 動態范圍
表示相機對強光和弱光同時分辨的能力,動態范圍越大,就可以探測更寬的光強范圍,圖像細節更豐富。動態范圍是滿阱與噪聲的比值 DR=滿阱容量(S)/噪聲(N),也可以用分貝表示:DR=20×log(滿阱容量(S)/噪聲(N))
? 像素合并(Binning)
Binning通過犧牲分辨率來提升信噪比。CCD的binning是像素讀出的過程中,電荷轉移時候實現的物理上的合并,合并后讀出噪聲與原來相同,因此信噪比成倍增加,參與Binning的像素數與信噪比成線性關系。Binning也能提高CCD相機的幀數。CMOS的binning是在A/D轉換后,也就是說CMOS在binning時并沒有物理上電荷合并,而且像素進行量化后,數字信號的合并。但是每個像素讀出噪聲也會被合并,CMOS的binning也會提升信噪比,但是不同于CCD,CMOS提升的是N0.5倍數,而且Binning提高不了幀數。
? 像素一致性
像素一致性是指每個像素點的成像差異,用PRNU(光響應不均勻性)和DSNU(暗噪聲不均勻性)表示
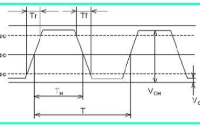
? 快門方式
相機主要是兩種快門方式:Rolling shutter(卷簾門快門)和Global shutter(全局快門)
審核編輯 黃宇
-
成像原理
+關注
關注
0文章
5瀏覽量
8256
發布評論請先 登錄
晶振的主要參數

三極管的主要參數介紹
光電耦合元件的分類和主要參數
光纖的主要參數

壓敏電阻主要參數詳解 如何選用壓敏電阻?
電磁流量計的主要參數及調整方法






 工商網監
工商網監
評論