 工業相機主要參數及計算方法
工業相機主要參數及計算方法

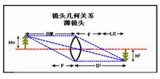
工業相機是機器視覺系統中的關鍵組件, 其本質是將光信號轉變為有序的電信號,進而實現數字圖像的獲取,廣泛應用于工業生產、檢測、測量等領域。其成像原理與小孔成像類似,但更為復雜。當被攝物體反射的光線通過工業鏡頭折射后,會投射到相機的感光傳感器上,這個感光傳感器通常是電荷耦合器件(CCD)或互補金屬氧化物半導體(CMOS)。
 dalsa nano 系列工業相機
dalsa nano 系列工業相機1、工作原理
圖像采集:通過鏡頭收集被拍攝物體反射或透射的光線,將其聚焦在圖像傳感器上。
光電轉換:圖像傳感器(常見的有 CCD 和 CMOS)將光信號轉換為電信號。以 CMOS 傳感器為例,每個像素點都有一個感光二極管,光線照射時產生與光強成正比的電荷,進而被轉換為電壓信號。
信號處理:轉換后的電信號經過放大器進行放大,并通過模數轉換器(ADC)將模擬信號轉換為數字信號,這些數字信號經過處理后形成數字圖像數據,傳輸給計算機等設備進行后續分析。
2、工業相機的主要特點
高可靠性:工業相機設計用于長時間連續工作,能夠在高溫、高濕、震動等惡劣環境下穩定運行。
高性能:提供高分辨率、高幀率、高動態范圍和高靈敏度,滿足精密檢測和高速捕捉的需求。
模塊化設計:工業相機通常采用模塊化設計,便于集成到各種工業設備和系統中。
豐富的接口:支持多種接口類型(如GigE、USB3.0、Camera Link、CoaXPress等),滿足不同帶寬和距離的需求。
靈活的配置:支持多種觸發模式、曝光控制和圖像處理功能,適應不同的應用場景。
3、分類方式
按圖像傳感器類型:分為 CCD 相機和 CMOS 相機。CCD 相機成像質量高,噪聲低,在低光照環境下表現出色,但成本較高、功耗大;CMOS 相機成本低、功耗低、數據讀取速度快,不過圖像質量相對略遜一籌。
按輸出色彩:可分為彩色相機和黑白(單色)相機。彩色相機能獲取物體豐富的色彩信息,適用于對顏色有要求的檢測,如食品外觀檢測、印刷品色彩檢測等;黑白相機則對光線更敏感,在檢測物體的灰度差異、紋理細節方面表現較好,常用于對精度要求高的尺寸測量、缺陷檢測等場景。
按掃描方式:有面陣相機和線陣相機。面陣相機一次獲取一幀完整圖像,適用于靜態物體或運動速度較慢的物體檢測;線陣相機每次獲取一行圖像,通過物體與相機的相對運動來構建完整圖像,常用于高速運動物體的檢測和高精度的一維測量,如印刷品的在線檢測、金屬板材的表面檢測等。
按輸出信號方式分:模擬相機、數字相機。
按響應頻率范圍分:可見光(普通)相機、紅外相機、紫外相機等。
4、主要參數計算
(1)分辨率(Resolution)
定義:相機每次采集圖像的像素點數,由相機所采用的感光芯片分辨率決定,是芯片靶面排列的像元數量(即像素數)。
影響:在采集圖像時,相機的分辨率對圖像質量有很大的影響。在對同樣大的視場(景物范圍)成像時,分辨率越高,對細節的展示越明顯。
表示方法:通常面陣相機的分辨率用水平和垂直分辨率兩個數字表示,如1920(H)x1080(V),前面的數字表示每行的像元數量,后面的數字表示像元的行數。線陣相機的分辨率通常表示多少K,如1K(1024)、2K(2048)、4K(4096)等。
總像素數 = 水平像素數 × 垂直像素數
例如:1920×1080 = 2,073,600 像素(約200萬像素)
(2)像素深度(Pixel Depth)
定義:即每像素數據的位數,一般用多少比特位表示。
影響:像素深度決定了圖像灰階的豐富程度。比特位數越多,表達圖像細節的能力越強,灰階值更加豐富、分得更細。但數據量也越大,可能影響系統的圖像處理速度。
常見值:一般常用的是8Bit,對于數字相機還會有10Bit、12Bit、14Bit等。
(3)最大幀率/行頻(Frame Rate/Line Rate)
定義:相機采集傳輸圖像的速率。
表示方法:通常幀率是相對于面陣工業相機來說的,單位是fps(Frame Per Second),如181fps,即相機每秒內最多可采集181幀圖像。行頻是相對于線陣工業相機來說的,單位是kHz,如80kHz,即相機每秒內最多可采集80000行圖像數據。
影響:幀率/行頻越高,相機在單位時間內采集的圖像數量越多,適用于需要快速捕捉動態圖像的場景。
計算方法:幀率=3×目標速度/橫向視野;行頻=運動速度/實際精度=運動速度×分辨率/視野。
根據應用場景中物體運動速度來確定所需幀率。假設物體運動速度為V(單位:mm/s),相機曝光時間為T(單位:s),在曝光時間內物體移動的距離不能超過一個像素尺寸P(單位:mm),則幀率F可由下式計算:F=1/T,其中T≤P/V。
(4) 曝光方式和快門速度(Exposure and Shutter Speed)
曝光方式:對于線陣相機,通常是逐行曝光的方式;面陣相機則有幀曝光、場曝光和滾動行曝光等幾種常見方式。
快門速度:一般可到10微秒,高速相機還可以更快。快門速度越快,相機捕捉圖像的能力越強,適用于光線變化快或運動物體拍攝的場景。
(5)像元尺寸(Pixel Size)
定義:像元是組成數字化影像的最小單元,像元尺寸大小和像元數(分辨率)共同決定了相機靶面的大小。
常見值:工業相機像元尺寸一般為3μm~14μm。
影響:像元尺寸越大,能夠接收到的光子數量越多,在同樣的光照條件和曝光時間內產生的電荷數量越多,圖像質量可能越高。但像元尺寸越小,制造難度越大。
計算:與分辨率和相機傳感器尺寸相關。例如已知傳感器的尺寸為Sa×Sb(水平尺寸 × 垂直尺寸,單位為 mm),相機分辨率為Na×Nb,則像素尺寸P(假設像素為正方形)為:P=Sa×1000/Na=Sb×1000/Nb。
(6)光譜響應特性(Spectral Range)
定義:指該像元傳感器對不同光波的敏感特性。
常見范圍:一般響應范圍是350nm~1000nm。一些相機在靶面前加了一個濾鏡,濾除紅外光線。如果系統需要對紅外感光,可去掉該濾鏡。
(7)接口類型(Interface Type)
常見類型:有Camera Link接口、以太網接口、1394接口、USB接口輸出等。目前最新的接口有CoaXPress接口。
影響:接口類型決定了相機與圖像處理系統或其他設備之間的數據傳輸方式。選擇合適的接口類型可以確保數據傳輸的穩定性和速度。
(8)傳感器尺寸
定義:相機傳感器的物理尺寸,通常以英寸(如1/2.3")或毫米(如12.8mm×9.6mm)表示。
計算方法:
傳感器尺寸通常由制造商提供,但可以通過像素尺寸和分辨率推算:
傳感器寬度 = 水平像素數 × 像素尺寸
傳感器高度 = 垂直像素數 × 像素尺寸
(9)其他參數
動態范圍:描述每個像素能夠分辨出的灰度等級。寬動態范圍能夠使場景中亮場和暗場部分的細節同時被清晰的記錄下來。
噪聲:成像過程中不希望被采集到的、實際成像目標外的信號。根據歐洲機器視覺協會(EMVA)的EMVA1288標準,相機噪聲總體上分為由有效信號帶來的散粒噪聲和相機本身固有的與信號無關的噪聲兩類。
5、應用領域與優勢
工業相機廣泛應用于自動化生產線上的質量控制、機器視覺系統、醫療成像、物流和倉儲、安全監控、交通監控以及軍事和航空等領域。其優勢包括:
高性能與穩定性:工業相機具有高的圖像穩定性、高傳輸能力和高抗干擾能力,能夠在惡劣條件下長時間穩定工作。
高精度與測量能力:通過高分辨率的圖像捕捉和精確的圖像分析算法,工業相機能夠實現高精度的測量和定位。
高速捕捉能力:高幀率的工業相機能夠快速捕捉動態圖像,適用于高速運動物體的拍攝和監測。
廣泛的適應性:不同類型的工業相機適用于不同的應用場景和需求,能夠滿足各種復雜的拍攝和分析任務。
6、知名品牌
國內外知名的工業相機品牌包括康耐視(Cognex)、基恩士(Keyence)、加拿大Teledyne DALSA、FLIR、Lumennera、日本AVALDATA、韓國VIEWORKS、大恒圖像、海康等。這些品牌以其卓越的性能和廣泛的應用領域而備受矚目。
綜上所述,工業相機作為機器視覺系統中的關鍵組件,在工業自動化和智能化方面發揮著重要作用。通過選擇合適的工業相機并結合先進的圖像分析算法,可以實現更高效、精確和可靠的自動化生產和質量控制。
-
半導體
+關注
關注
335文章
28889瀏覽量
237579 -
機器視覺
+關注
關注
163文章
4595瀏覽量
122877 -
工業相機
+關注
關注
5文章
365瀏覽量
24713
發布評論請先 登錄
步進電機選型的計算方法有哪些?
步進電機主要參數介紹
AGP、PCI-E總線帶寬的計算方法
詳解機器視覺之工業鏡頭的計算方法介紹






 工商網監
工商網監
評論