") 基于DYNA4的智能大燈控制算法的仿真閉環(huán)測(cè)試——從MIL到HIL
基于DYNA4的智能大燈控制算法的仿真閉環(huán)測(cè)試——從MIL到HIL

汽車(chē)的發(fā)展歷史源遠(yuǎn)流長(zhǎng),汽車(chē)車(chē)燈的出現(xiàn)和發(fā)展也在其中起著重要的作用,從煤油燈到當(dāng)前蓬勃發(fā)展的智能大燈,其間百余年的變化,不斷有新的產(chǎn)品和技術(shù)問(wèn)世。
當(dāng)前市場(chǎng)上的智能大燈產(chǎn)品,比如自適應(yīng)前照燈系統(tǒng)AFS(Adaptive Front-Lighting System),自適應(yīng)遠(yuǎn)光燈系統(tǒng)ADB(Adaptive Driving Beam),以及自由度更高的數(shù)字光處理系統(tǒng)DLP(Digital Light Processing)等,是汽車(chē)技術(shù)創(chuàng)新領(lǐng)域的重要組成部分,對(duì)汽車(chē)駕駛的安全性和便利性產(chǎn)生重要積極作用,也為交通信息傳遞和交互的方式提供新的思路。
產(chǎn)品的研發(fā)過(guò)程伴隨著持續(xù)測(cè)試。針對(duì)汽車(chē)智能大燈產(chǎn)品而言,工具可以幫助您實(shí)現(xiàn)對(duì)其控制算法、軟件或者控制器的閉環(huán)測(cè)試需求。
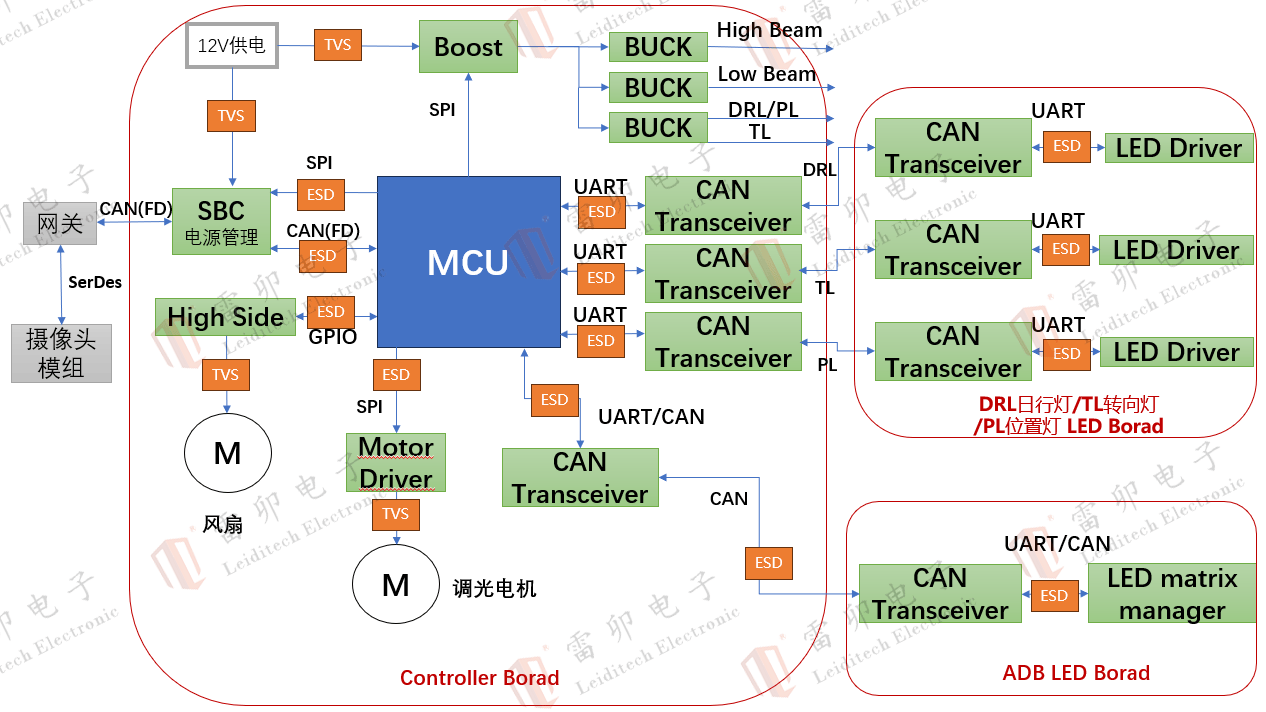
條條大路通羅馬,智能大燈產(chǎn)品的技術(shù)實(shí)現(xiàn)也是如此:其軟件自不用說(shuō),其照明模組硬件的實(shí)現(xiàn)原理也不盡相同。本文中,作為示例的被測(cè)對(duì)象為一種假想的,簡(jiǎn)單的ADB大燈產(chǎn)品:其照明模組部分含有13個(gè)相互獨(dú)立的LED照明單元。其系統(tǒng)結(jié)構(gòu)描述如下:前視攝像頭模組將視頻圖像信號(hào)傳遞給ADB控制器,ADB控制器輸出左右兩側(cè)的ADB照明模組的控制信號(hào)——每個(gè)LED照明單元的光強(qiáng)度指令信號(hào)。系統(tǒng)結(jié)構(gòu)示意圖如圖1所示:
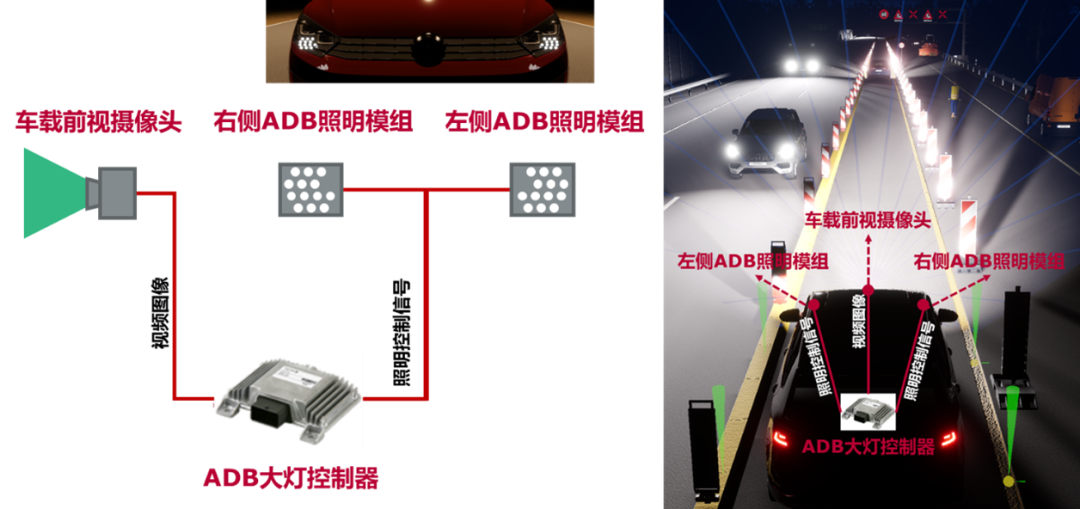
圖1:本文假想的ADB大燈系統(tǒng)結(jié)構(gòu)簡(jiǎn)化示意圖
以這種假想的簡(jiǎn)單的ADB大燈產(chǎn)品作為示例,目的是為了使讀者能夠通過(guò)這個(gè)簡(jiǎn)單的例子,了解如何在虛擬駕駛測(cè)試仿真軟件DYNA4中建立這樣的照明模組,通過(guò)仿真進(jìn)行觀察并對(duì)仿真可視化效果建立感性的認(rèn)識(shí);借此介紹實(shí)現(xiàn)ADB大燈控制算法模型(模型在環(huán)/Model In the Loop/MIL)閉環(huán)測(cè)試的方案。文章最后,會(huì)進(jìn)行一定的拓展討論(比如硬件在環(huán)/Hardware In the Loop/HIL)。
基于DYNA4的ADB控制算法模型(MIL)的閉環(huán)仿真測(cè)試整體方案
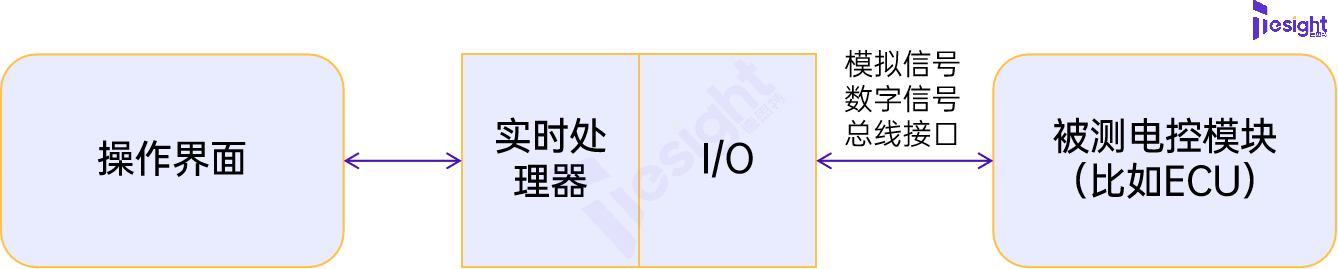
DYNA4是始于1992年的虛擬駕駛測(cè)試(車(chē)輛與駕駛場(chǎng)景)仿真軟件,主要應(yīng)用于汽車(chē)行業(yè)的智能駕駛、底盤(pán)操穩(wěn)、動(dòng)力系統(tǒng)等領(lǐng)域,覆蓋乘用車(chē)、商用車(chē)、卡車(chē)、拖車(chē)及輪式特種車(chē)輛。虛擬駕駛測(cè)試仿真是指通過(guò)仿真的技術(shù)手段,在虛擬環(huán)境下模擬實(shí)車(chē)測(cè)試時(shí)的各項(xiàng)關(guān)鍵部分:車(chē)輛、傳感器、駕駛員、道路、場(chǎng)地及交通設(shè)施、交通參與者、光照、氣候條件等等。通過(guò)打通DYNA4與被測(cè)對(duì)象之間的交互鏈路,實(shí)現(xiàn)在擬真的虛擬條件下的閉環(huán)測(cè)試,如圖2所示。
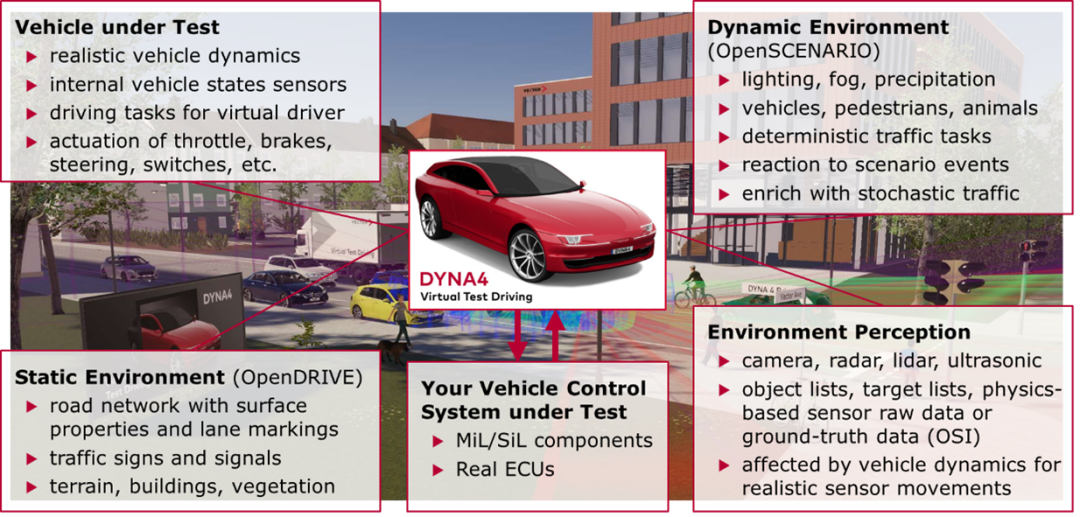
圖2:虛擬駕駛測(cè)試仿真軟件DYNA4重要仿真部分及與被測(cè)對(duì)象結(jié)合形成閉環(huán)仿真測(cè)試
DYNA4作為虛擬駕駛測(cè)試仿真軟件,可以應(yīng)用于現(xiàn)代汽車(chē)開(kāi)發(fā)流程(無(wú)論是V模型流程還是軟件定義汽車(chē)概念影響下的開(kāi)發(fā)測(cè)試閉環(huán)迭代流程)中的大部分環(huán)節(jié)。通過(guò)仿真手段,可以實(shí)現(xiàn)諸如:驗(yàn)證/對(duì)比系統(tǒng)方案,支持功能安全問(wèn)題評(píng)級(jí)及安全解決方案驗(yàn)證,在整車(chē)層面仿真部件載荷情況,然后進(jìn)行部件可靠性分析或者耐久測(cè)試,軟件算法模型功能、性能驗(yàn)證與桌面標(biāo)定,控制器閉環(huán)測(cè)試,系統(tǒng)集成閉環(huán)測(cè)試,駕駛員在環(huán)和整車(chē)在環(huán)閉環(huán)測(cè)試等等。利用仿真技術(shù),可以在正向開(kāi)發(fā)和自主開(kāi)發(fā)中提高效率,節(jié)省成本,保證產(chǎn)品設(shè)計(jì)質(zhì)量。
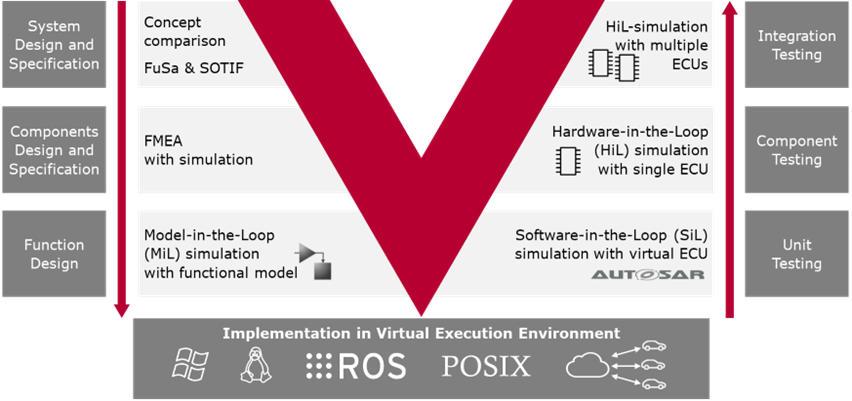
圖3:DYNA4在V模型開(kāi)發(fā)流程中可以支持的環(huán)節(jié)與部分角度
回到智能大燈領(lǐng)域,先從模型在環(huán)(MIL)的測(cè)試環(huán)節(jié)去考慮實(shí)現(xiàn)ADB大燈控制算法模型的閉環(huán)測(cè)試:從模型在環(huán)(MIL)的角度出發(fā),被測(cè)對(duì)象是ADB大燈控制控制算法模型(比如Simulink模型或者C/C++代碼等),需要對(duì)其進(jìn)行算法功能、性能驗(yàn)證等。
這里定義ADB控制算法模型的接口為:輸入為車(chē)載前視攝像頭的視頻圖像,輸出為照明模組的控制信號(hào),如圖4所示。
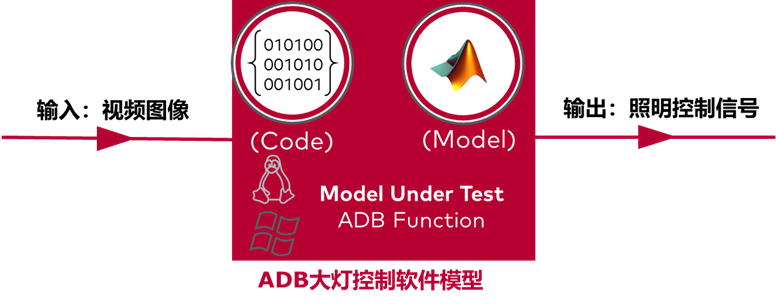
圖4:ADB大燈控制模型的輸入/輸出
在DYNA4的仿真中,與現(xiàn)實(shí)世界相同,自車(chē)ADB大燈的照明狀態(tài)變化也會(huì)影響DYNAanimation(虛擬測(cè)試場(chǎng)景渲染和可視化功能及窗口)中的渲染出來(lái)的虛擬駕駛場(chǎng)景,在虛擬自車(chē)上安裝的虛擬前視攝像頭傳感器也會(huì)拍到變化的虛擬世界的圖像,并將這些圖像按照設(shè)定的幀率實(shí)時(shí)傳遞到被測(cè)的ADB大燈控制算法模型中。算法模型根據(jù)此輸入,不斷地輸出,從而對(duì)虛擬ADB照明模組進(jìn)行控制。上述過(guò)程和實(shí)車(chē)測(cè)試一樣。閉環(huán)測(cè)試因此得以實(shí)現(xiàn),如圖5所示。
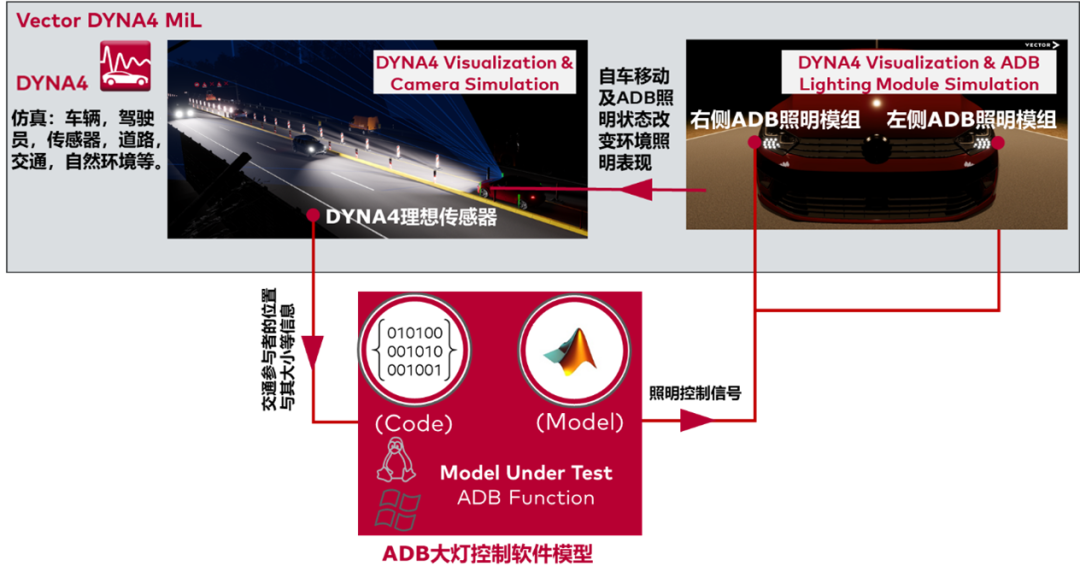
圖5:在DYNA4軟件中實(shí)現(xiàn)ADB大燈控制算法模型(MIL)閉環(huán)測(cè)試的方案示意圖 – DYNA4攝像頭傳感器模型將視頻圖像信息傳遞給ADB大燈控制算法模型作為輸入
從圖6(DYNAanimation渲染的仿真截圖)可以看到,除了被測(cè)的ADB大燈控制算法模型之外,其余部分均在DYNA4去實(shí)現(xiàn):承載ADB控制算法的車(chē)輛(自車(chē)),自車(chē)的前視攝像頭模組,自車(chē)上的ADB照明單元模組,駕駛員,靜態(tài)道路及標(biāo)線(xiàn)、道路設(shè)施,道路旁的人工照明條件及可移動(dòng)/不可移動(dòng)的道路設(shè)施,自車(chē)周?chē)慕煌▍⑴c者的行為以及燈光對(duì)場(chǎng)景中的照明影響,晴天/夜晚的自然光照條件。
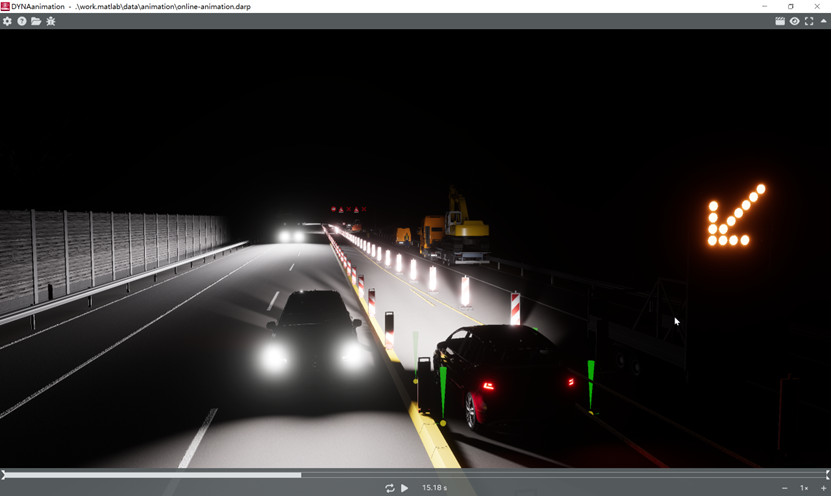
圖6:DYNAanimation夜晚道路施工路段的仿真截圖
DYNA4中實(shí)現(xiàn)ADB控制算法模型閉環(huán)測(cè)試及其仿真
本文對(duì)于DYNA4的常規(guī)功能,比如自車(chē)及車(chē)載傳感器,駕駛員,駕駛場(chǎng)景中的靜態(tài)道路和動(dòng)態(tài)交通的實(shí)現(xiàn),不做討論和展示。如果您有興趣了解,歡迎聯(lián)系我們。本文僅說(shuō)明:如何使用DYNA4提供的照明單元模塊,創(chuàng)建一個(gè)ADB的照明模組,并且該照明模組的照明效果可以通過(guò)DYNA4的動(dòng)畫(huà)演示軟件——DYNAanimation進(jìn)行渲染和可視化,如圖7中所示。

圖7:DYNAanimation渲染的由DYNA4建立的ADB照明模組及照射光
這里使用的是DYNA4提供的聚光類(lèi)型光源(Spot Light)的照明單元模型去組建ADB照明模組。
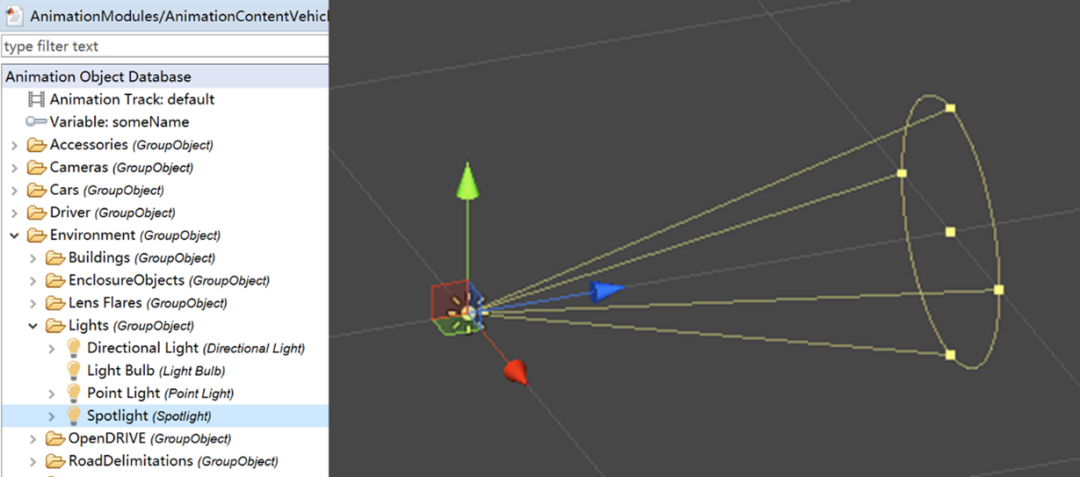
圖8:DYNA4提供的聚光類(lèi)型光源(Spot Light)的照明單元及其光發(fā)射范圍和形狀的示意
使用DYNA4的聚光類(lèi)型光源(Spot Light)的照明單元模型,可以實(shí)現(xiàn)自定義的ADB照明矩陣模組,比如LED照明單元數(shù)量,LED燈組的相對(duì)位置、朝向分布等。可以把屬于同一個(gè)ADB照明模組中所有的LED放到一個(gè)組(Group)里,比如圖9中展示的Group - “ADB Module Left”,就像現(xiàn)實(shí)生活中的LED燈組的一個(gè)實(shí)際載體(比如一塊板子,上面安裝著13個(gè)LED照明單元)。處于同一個(gè)Group里的13個(gè)LED照明單元,只需將它們的相對(duì)位置和相對(duì)朝向設(shè)置正確即可,無(wú)需考慮它們?cè)谲?chē)身坐標(biāo)系下的絕對(duì)位置和朝向。最后,可以設(shè)置和調(diào)整Group - “ADB Module Left”(即這個(gè)ADB照明模組整體)在車(chē)身上的位置和朝向。靈活利用分組Group功能,可以使各層級(jí)解耦,無(wú)論設(shè)置還是調(diào)整,各層級(jí)之間不會(huì)相互影響。
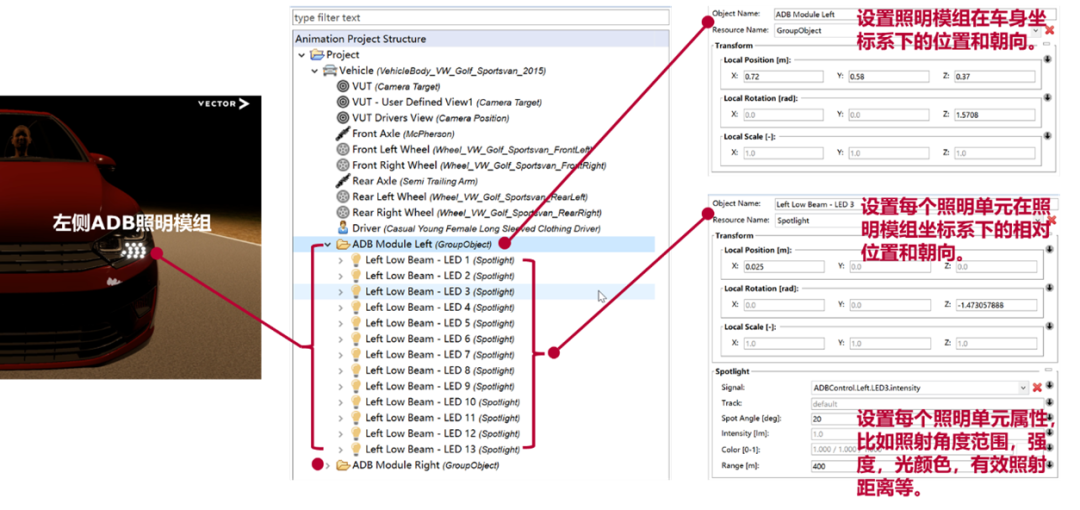
圖9:在DYNA4中利用其提供的光源模型,組合所需的ADB照明模組、矩陣
在圖9中,可以看到“ADB Module Left”這個(gè)Group下面有13個(gè)LED照明單元(即DYNA4的Spot Light模快)。如果需要對(duì)所有LED光源模型的某一個(gè)屬性做統(tǒng)一的修改,可以直接使用DYAN4提供的文本編輯視圖直接對(duì)DYNAanimation的工程進(jìn)行文本化描述和編輯(如圖10所示):
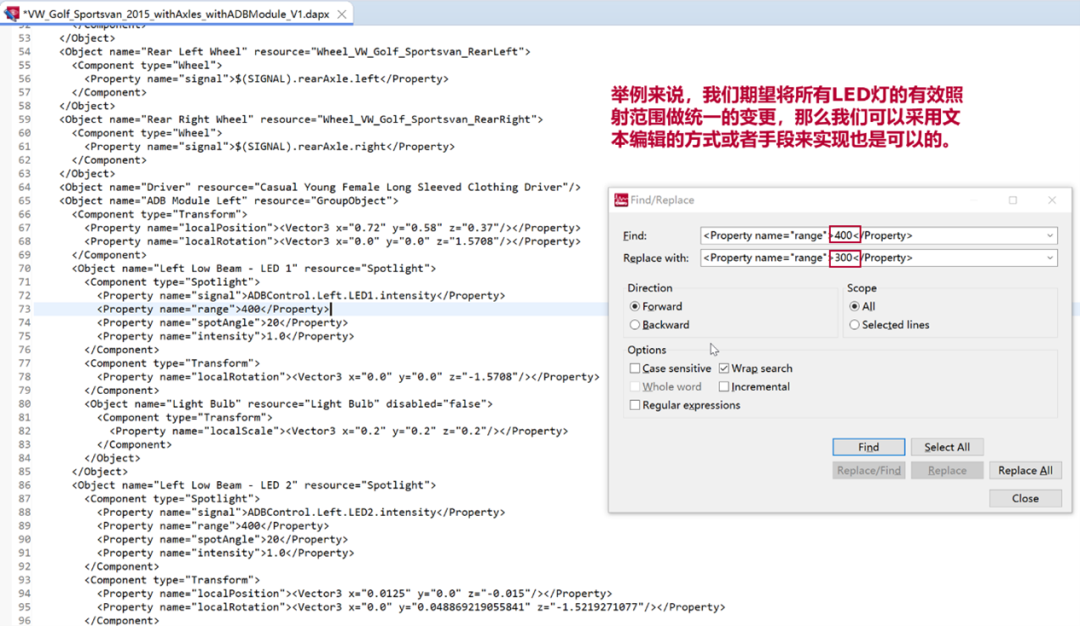
圖10:DYNA4參數(shù)文件的文本編輯器
接下來(lái)更深入地看一下DYNA4中關(guān)于Spot Light照明單元模型的屬性設(shè)置(圖11)。可以發(fā)現(xiàn),每個(gè)LED燈的燈光強(qiáng)度是可以通過(guò)DYNA4的Simulink模型中的信號(hào)來(lái)控制的:
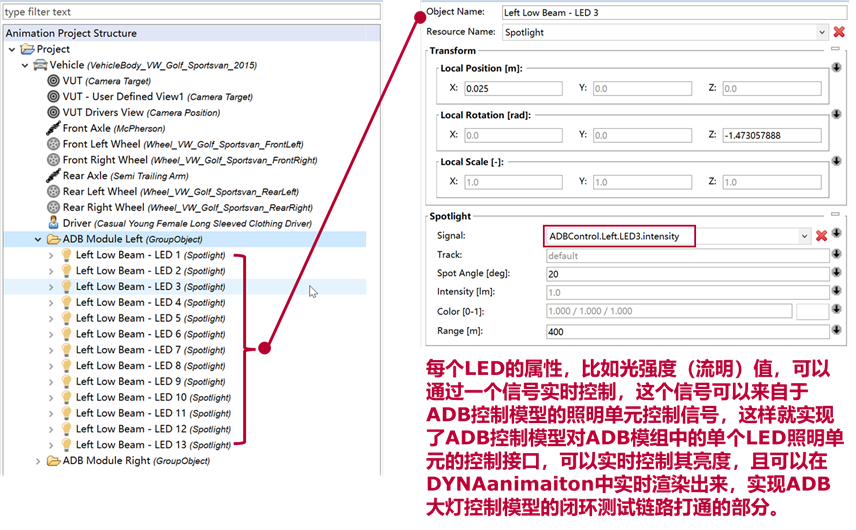
圖11:DYNA4中建立的ADB照明模組中的每個(gè)LED照明單元可以由相互獨(dú)立的信號(hào)控制
LED照明單元的控制信號(hào)是由用戶(hù)自行定義的,可以讓所有照明單元之間控制信號(hào)完全獨(dú)立,也可以設(shè)置幾個(gè)LED照明單元為某一個(gè)區(qū)域的照明小組,該小組內(nèi)的照明單元統(tǒng)一由一個(gè)信號(hào)統(tǒng)一控制。控制信號(hào)具體創(chuàng)建和定義是在DYNA4的Simulink模型中實(shí)現(xiàn)的。在圖11中,只是在DYNA4的圖形用戶(hù)界面對(duì)已經(jīng)定義好的控制信號(hào)(圖中為ADBControl.LED3.intensity)進(jìn)行了引用和使用,來(lái)控制每個(gè)LED照明單元在DYNAanimation渲染時(shí)的光強(qiáng)度。其實(shí)在DYNA4的Simulink模型中實(shí)現(xiàn)LED照明單元的控制信號(hào)的建立和鏈路打通,也非常簡(jiǎn)單。重點(diǎn)是創(chuàng)建的這些信號(hào)(比如ADBControl.LED1.intensity,ADBControl.LED2.intensity…)要最終連接到DYNA4的Simulink模型的Animation3模塊中(如圖12所示),這樣DYNAanimation工程中的這些LED照明單元模型就可以通過(guò)這些燈光強(qiáng)度信號(hào)進(jìn)行控制。
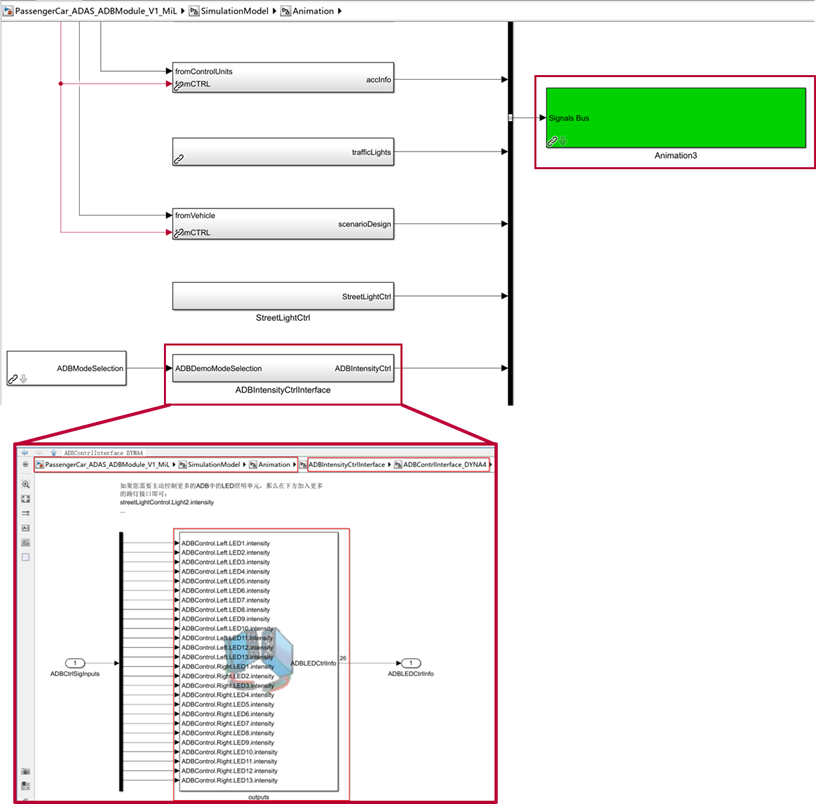
圖12:紅框中的ADBIntensityCtrlInterface子系統(tǒng)是用戶(hù)自行創(chuàng)建的,沿用DYNA4的模型層級(jí)結(jié)構(gòu),將新創(chuàng)建的控制信號(hào)(ADBControl.LED1.intensity等)傳遞到Animation3這個(gè)模塊即可。
到目前為止,已經(jīng)在DYNA4中實(shí)現(xiàn)了本文假設(shè)的ADB大燈的照明模組模型部分的建立,并且實(shí)現(xiàn)了對(duì)每個(gè)LED照明單元的燈光強(qiáng)度控制信號(hào)和控制鏈路。接下來(lái),可以看下如何將被測(cè)的ADB控制算法模型集成進(jìn)來(lái),實(shí)現(xiàn)對(duì)于被測(cè)的ADB大燈控制算法模型的模型在環(huán)(MIL)閉環(huán)測(cè)試的目的(如圖5所示)。
可以使用DYNA4提供的Camera Sensor模型和對(duì)應(yīng)的模塊,來(lái)模擬車(chē)載前視攝像頭,通過(guò)設(shè)置其安裝位置、朝向,以及攝像頭自身的屬性參數(shù),比如快門(mén)速度,光圈大小,感光度(這些參數(shù)可以是固定值,也可以類(lèi)似上面的LED照明單元模型的燈光強(qiáng)度屬性一樣,通過(guò)信號(hào)實(shí)時(shí)控制)等,可以設(shè)置畸變過(guò)濾器、灰度過(guò)濾器、拜爾濾色鏡和模擬臟污等,如圖13所示。
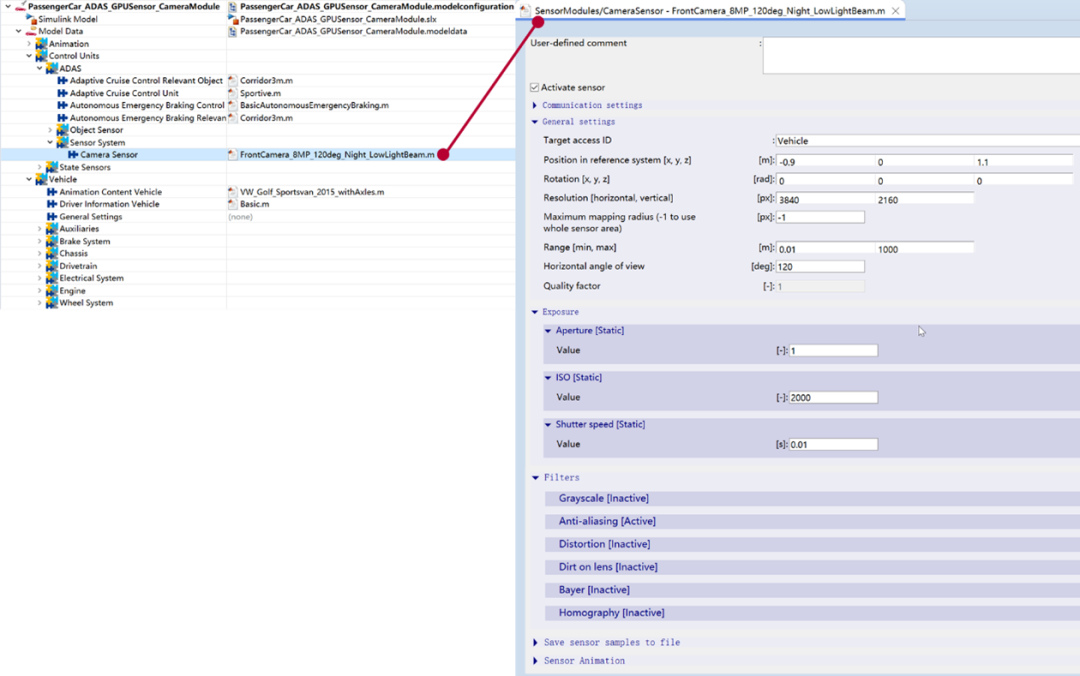
圖13:DYNA4中的Camera Sensor設(shè)置參數(shù)文件一瞥。
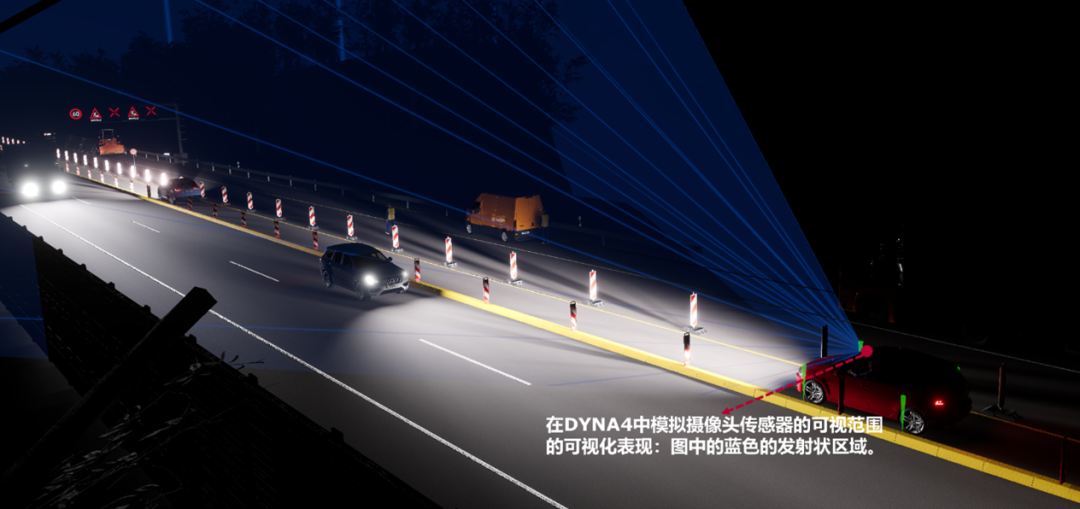
圖14:DYNA4中的前視攝像頭傳感器的可視區(qū)域在DYNAanimation中的展示
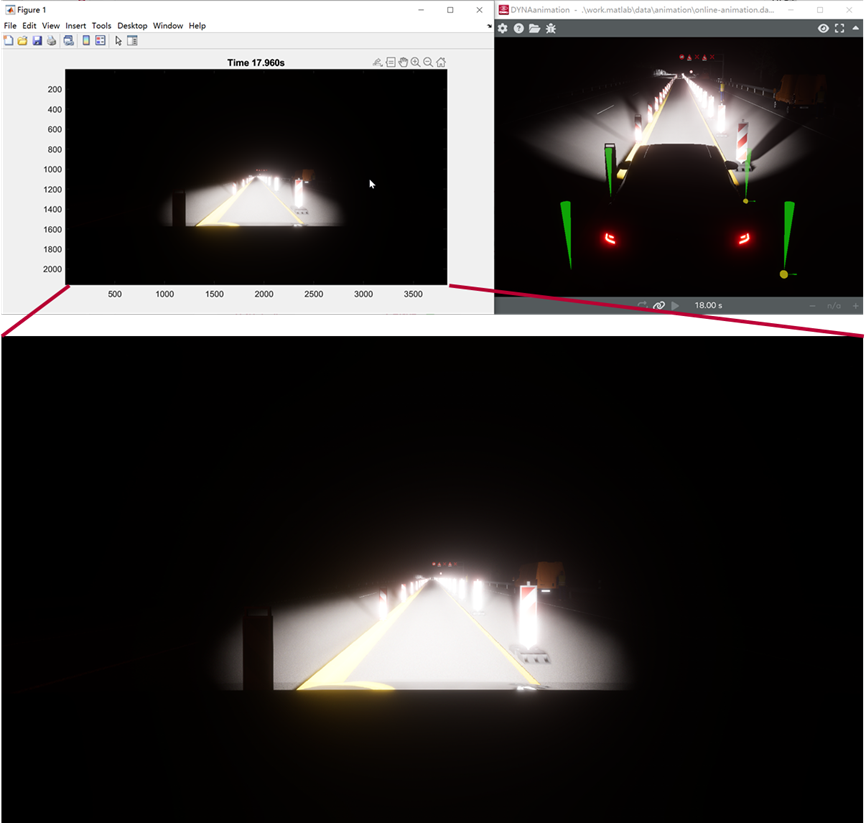
圖15:DYNA4中的前視攝像頭傳感器1模型(設(shè)置為8百萬(wàn)像素?cái)z像頭,視場(chǎng)角水平120度*豎直67.5度)在Simulink輸出的圖像展示。
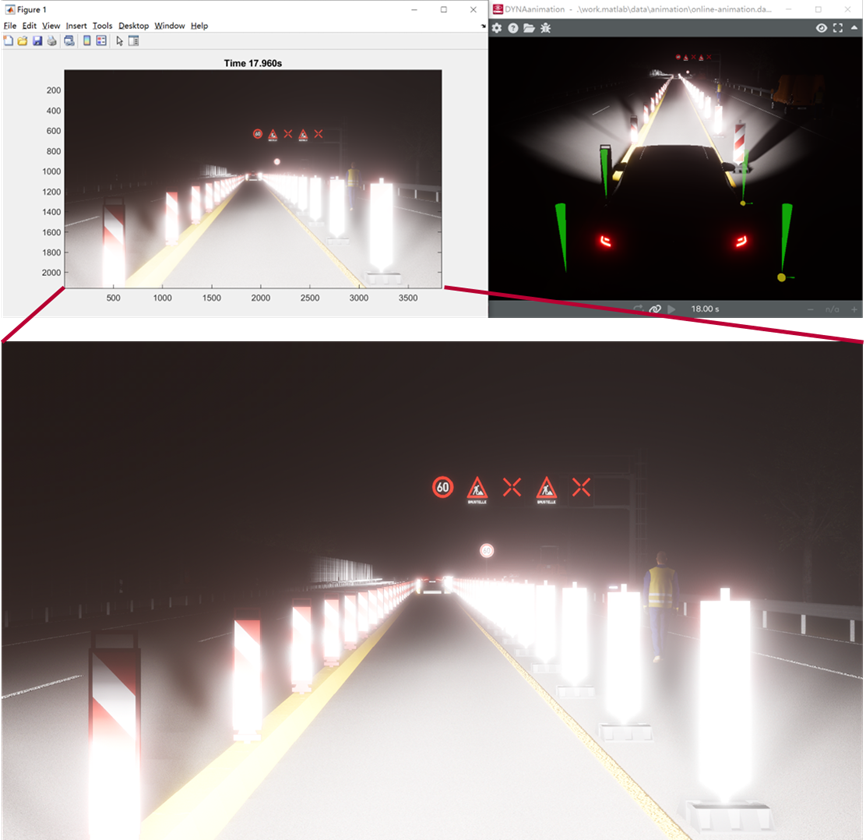
圖16:DYNA4中的前視攝像頭傳感器2模型(設(shè)置為8百萬(wàn)像素?cái)z像頭,視場(chǎng)角水平30度*豎直16.87度)在Simulink輸出的圖像展示。
上下滑動(dòng)閱讀更多內(nèi)容
圖15和圖16中展示的DYNA4攝像頭傳感器模型拍攝到的畫(huà)面,在Simulink模型中可以按照攝像頭模型設(shè)置的圖像更新時(shí)間(對(duì)應(yīng)的是模擬的真實(shí)攝像頭的幀率要求,比如30幀每秒),被傳輸?shù)紸DB大燈控制算法模型中,如圖17所示。
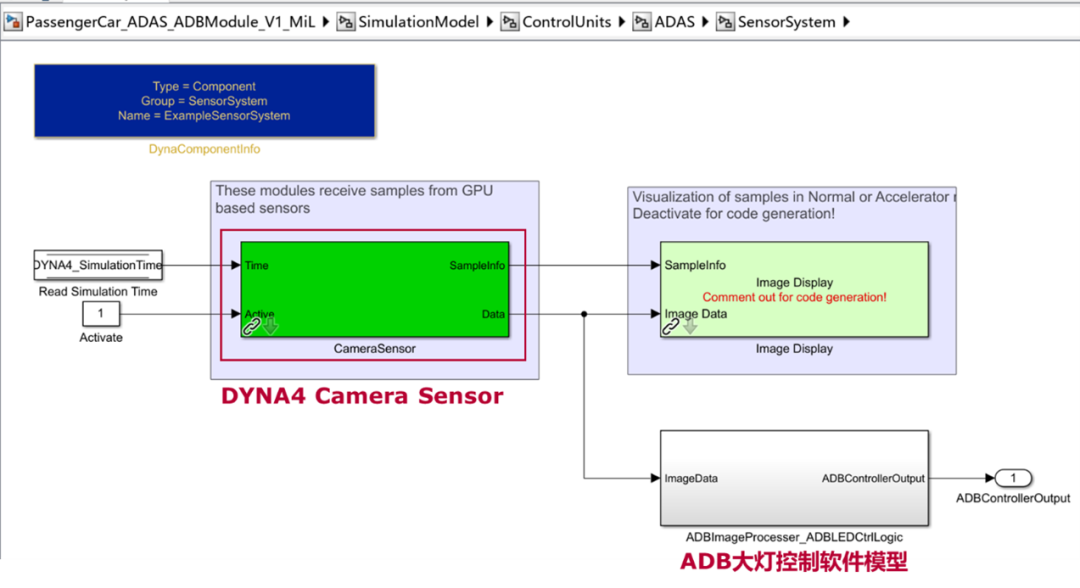
圖17:DYNA4的Simulink中使用Camera Sensor對(duì)ADB大燈控制器軟件模型進(jìn)行圖像信息輸入。
ADB大燈控制算法模型,在接收到每一幀的圖像后,經(jīng)過(guò)圖像處理部分的功能(比如對(duì)于車(chē)輛前方的交通參與者信息的識(shí)別)和ADB的燈光控制邏輯(基于車(chē)輛前方的交通參與者信息來(lái)決定如何控制ADB大燈的照明區(qū)域并映射到對(duì)于ADB照明模組中的照明單元的控制信號(hào)),最終輸出ADB照明模組以及照明單元的控制信號(hào)。ADB大燈控制算法模型輸出的這些控制信號(hào),可以通過(guò)之前在DYNA4的Simulink模型制作的ADB照明模組的控制鏈路(見(jiàn)圖12內(nèi)),實(shí)現(xiàn)對(duì)于仿真過(guò)程中的燈光的控制,其可視化效果可以在DYNAanimation窗口中看到。
因?yàn)楸疚恼故镜脑贒YNA4中的ADB照明模組是一個(gè)假想的、簡(jiǎn)單的模組,模組中的LED燈的數(shù)量、照明參數(shù)及其矩陣排布和區(qū)域分布很可能不合理,所以仿真的動(dòng)畫(huà)效果不是很理想,與現(xiàn)實(shí)產(chǎn)品的預(yù)期和真實(shí)表現(xiàn)差異較大,還請(qǐng)理解。希望通過(guò)本文,您能了解到DYNA4可以實(shí)現(xiàn)ADB控制算法模型的閉環(huán)測(cè)試。
拓展討論
最后是兩點(diǎn)討論,作為本文之前內(nèi)容的補(bǔ)充和拓展。
1
可能您的,ADB控制模型可能不包含圖像處理功能,即:在ADB產(chǎn)品系統(tǒng)中,ADB控制器的輸入是接收車(chē)上其他控制器輸出的周?chē)煌▍⑴c者的狀態(tài)信息,比如:交通參與者相對(duì)于自車(chē)的位置、交通參與者的截面的大小等。這些信息可以作為ADB大燈控制算法模型的輸入,其輸出控制ADB模組照明的鏈路仍然保持不變,同樣可以實(shí)現(xiàn)閉環(huán)仿真測(cè)試。或稱(chēng)組織文化,是一個(gè)組織由其價(jià)值觀、信念、儀式、符號(hào)、處事方式等組成的其特有的文化形象。
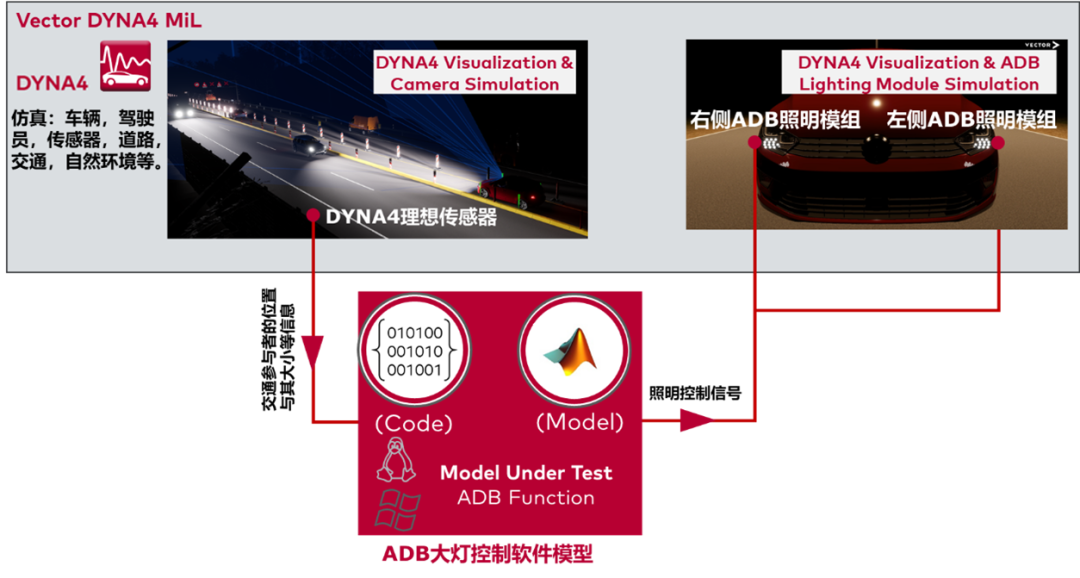
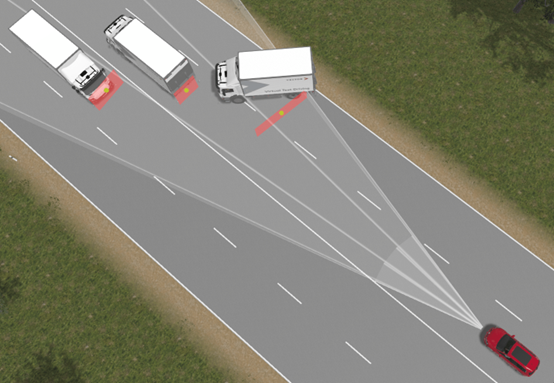
圖20(下):DYNA4中的理想傳感器的感知結(jié)果在DYNAanimation中的可視化表現(xiàn)
圖21(上): 在DYNA4軟件中實(shí)現(xiàn)ADB大燈控制算法模型(MIL)閉環(huán)測(cè)試的方案示意圖 – 理想傳感器探測(cè)車(chē)輛周?chē)煌▍⑴c者的信息給到ADB大燈控制算法模型作為輸入
2
如果被測(cè)對(duì)象是一個(gè)真實(shí)的ADB控制器,即從硬件在環(huán)(HIL)測(cè)試環(huán)節(jié)和層面去考慮閉環(huán)測(cè)試。此時(shí),需要引入CANoe軟件和相關(guān)硬件設(shè)備來(lái)實(shí)現(xiàn),具體的方案參見(jiàn)圖22和圖23。
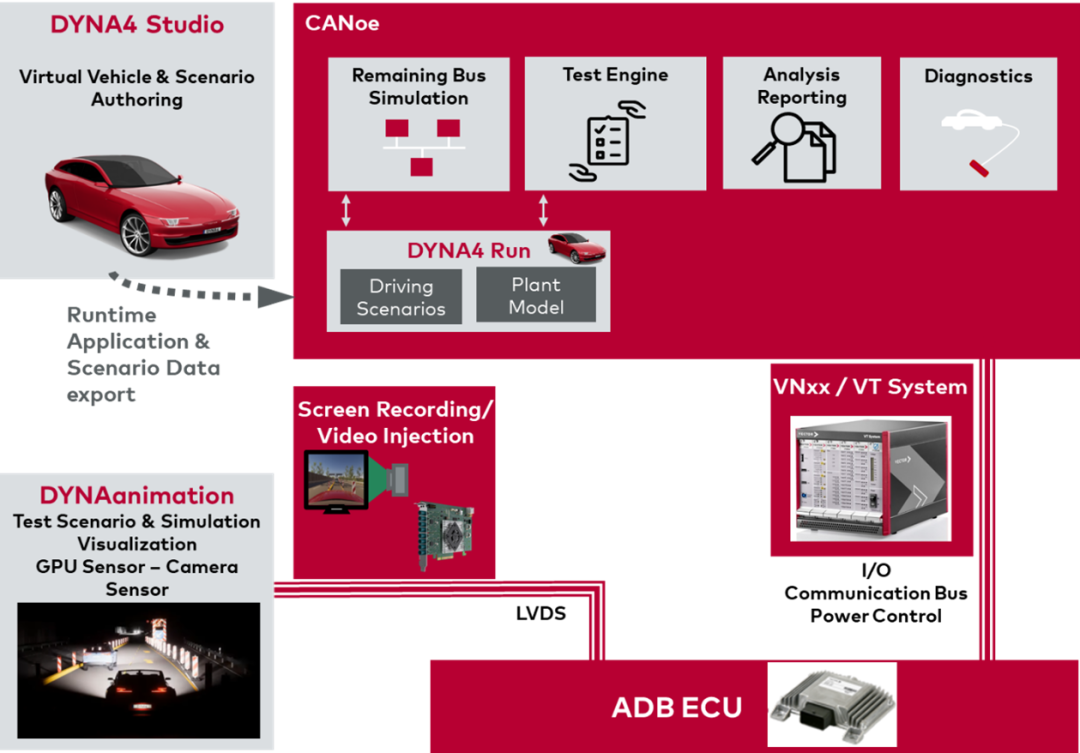
圖22: 在DYNA4軟件中實(shí)現(xiàn)ADB大燈控制器(HIL)閉環(huán)測(cè)試的方案示意圖 – DYNA4攝像頭傳感器模型將視頻圖像信息通過(guò)視頻暗箱或者視頻注入設(shè)備給到ADB控制器
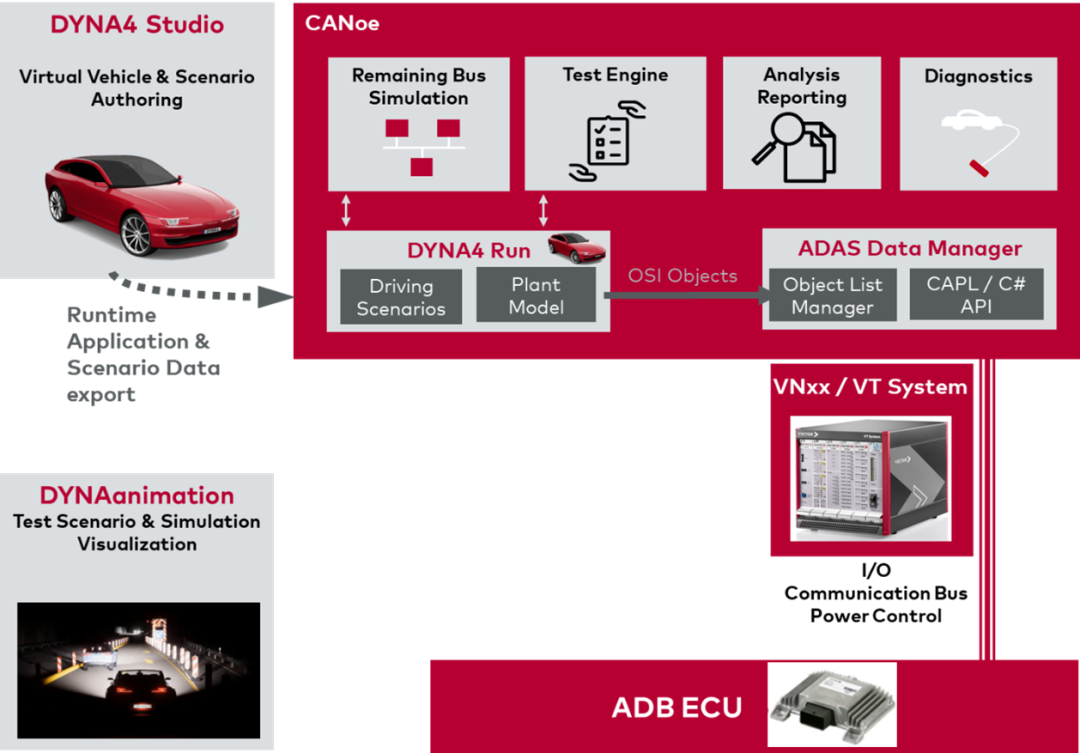
圖23: 在DYNA4軟件中實(shí)現(xiàn)ADB大燈控制器(HIL)閉環(huán)測(cè)試的方案示意圖 – DYNA4理想傳感器探測(cè)車(chē)輛周?chē)煌▍⑴c者的信息(OSI標(biāo)準(zhǔn)的數(shù)據(jù)模型)
-
仿真
+關(guān)注
關(guān)注
52文章
4254瀏覽量
135549 -
HIL
+關(guān)注
關(guān)注
2文章
65瀏覽量
17951 -
控制算法
+關(guān)注
關(guān)注
4文章
170瀏覽量
22197 -
mil
+關(guān)注
關(guān)注
0文章
12瀏覽量
8118
發(fā)布評(píng)論請(qǐng)先 登錄
智能控制ADB 大燈和交互投影DLP大燈 的防靜電解析
電力電子半實(shí)物仿真(HIL)原理及應(yīng)用

CFD仿真與測(cè)試協(xié)同創(chuàng)新,構(gòu)建“仿真 + 實(shí)測(cè)”閉環(huán)
基于DYNA4的智能大燈控制算法的仿真閉環(huán)測(cè)試

智能座艙HIL仿真測(cè)試解決方案

智能駕駛HIL仿真測(cè)試解決方案

汽車(chē)HiL測(cè)試:利用TS-GNSS模擬器掌握硬件性能的仿真藝術(shù)
基于V2X和自動(dòng)駕駛HIL聯(lián)調(diào)的仿真測(cè)試系統(tǒng)開(kāi)發(fā)

基于TSMaster的MIL/HIL仿真開(kāi)發(fā)(空簧和連續(xù)阻尼控制篇)

PPEC-HIL 三相整流逆變實(shí)時(shí)仿真測(cè)試
設(shè)計(jì)仿真 | 基于VTD的智能大燈仿真測(cè)試方案
智駕仿真測(cè)試實(shí)戰(zhàn)之自動(dòng)泊車(chē)HiL仿真測(cè)試

設(shè)計(jì)仿真 基于VTD的AR-HUD仿真測(cè)試解決方案

【干貨分享】硬件在環(huán)仿真(HiL)測(cè)試






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論