 MS1005——激光測距用高精度時間測量(TDC)電路
MS1005——激光測距用高精度時間測量(TDC)電路
產品簡述
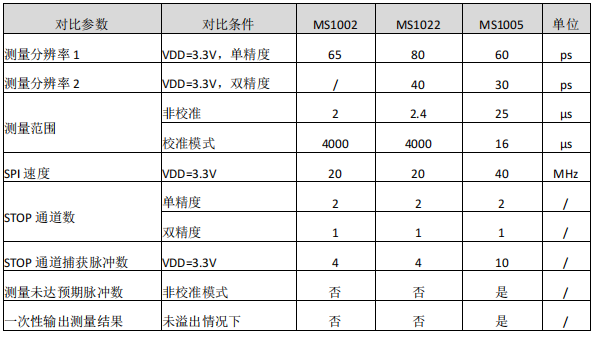
MS1005 是一款高精度時間測量(TDC)電路,對比
MS1002 具有更高的精度和更小的封裝,適合于高精度
小封裝的應用領域。
MS1005 具有雙通道、多脈沖的采樣能力、高速 SPI
通訊、多種測量模式,適合于激光雷達和激光測距。

主要特點
? 雙通道單精度模式 60ps
? 單通道雙精度模式 30ps
? 非校準測量范圍 3.5ns(0ns)至 25μs
? 單精度校準測量范圍 3.5ns(0ns)至 16μs
? 雙精度校準測量范圍 3.5ns 至 4μs
?20ns 最小脈沖間隔,雙通道最多可接收 20 個脈沖
? 4 線 SPI 通信接口
? 工作電壓 2.5V 至 3.6V
? 工作溫度-40°C 至+125°C
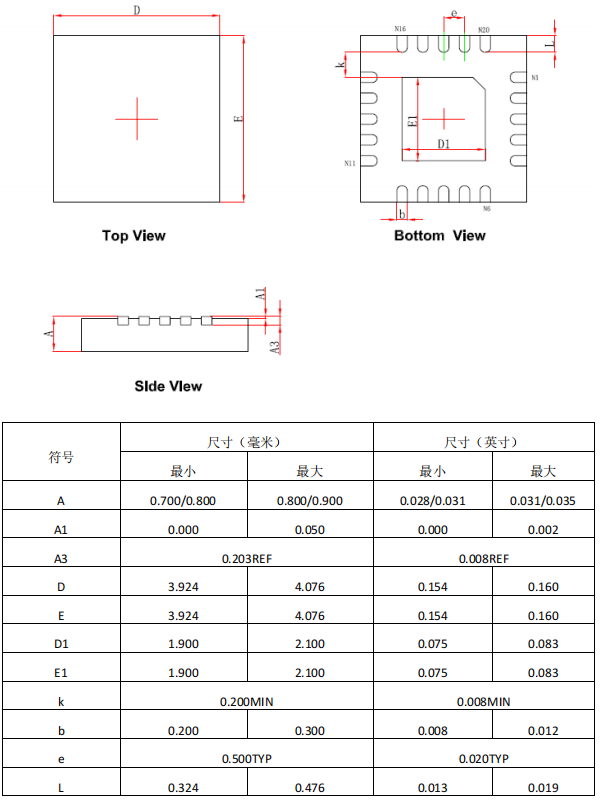
? QFN20 封裝
應用
? 激光雷達
? 激光測距
? 脈沖測量
產品規格分類

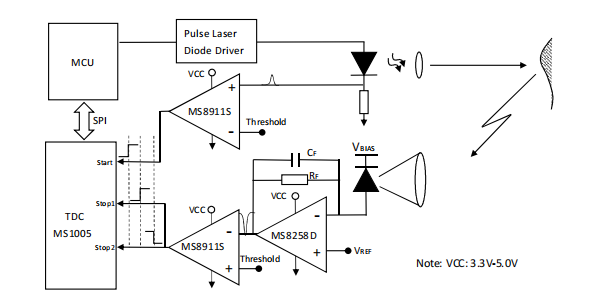
系統框圖
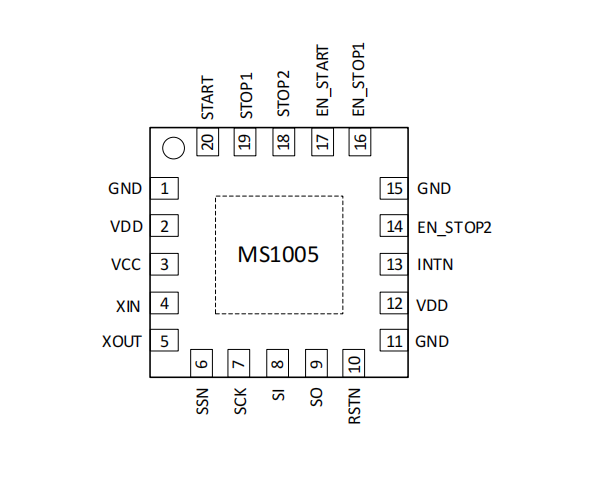
管腳圖
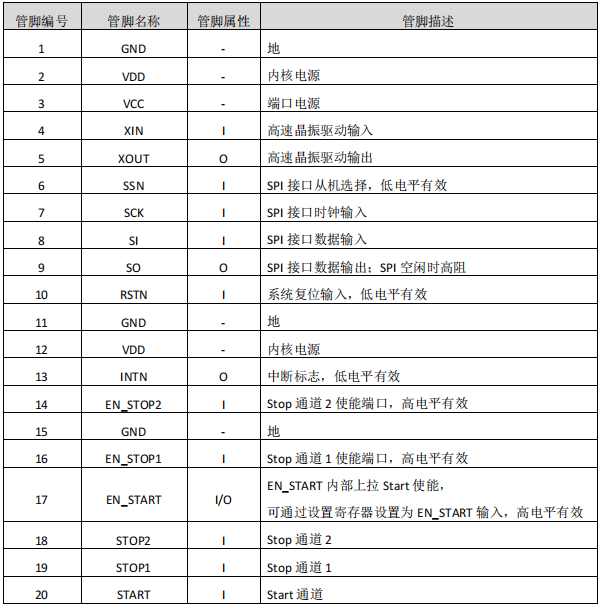
管腳說明
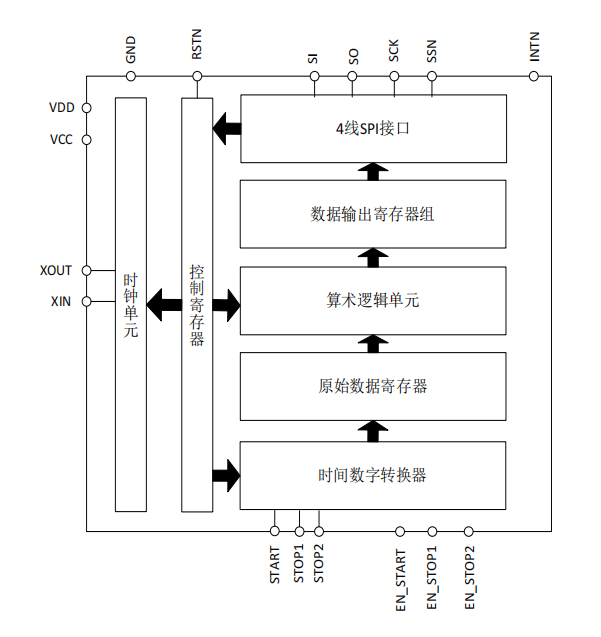
內部框圖
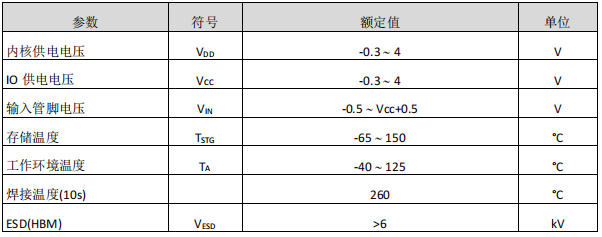
極限參數
芯片使用中,任何超過極限參數的應用方式會對器件造成永久的損壞,芯片長時間處于極限工作
狀態可能會影響器件的可靠性。極限參數只是由一系列極端測試得出,并不代表芯片可以正常工作在
此極限條件下。
推薦工作條件
沒有特別規定,環境溫度為 TA= 25°C ±2°C 。

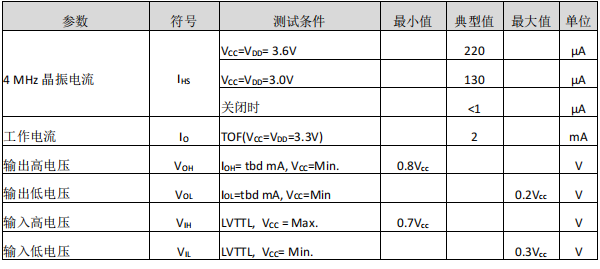
電氣參數
直流電特性
VCC= VDD= 3.0V, TJ= -40 到 +85°C。
如有需求請聯系——三亞微科技 王子文(16620966594)
功能描述
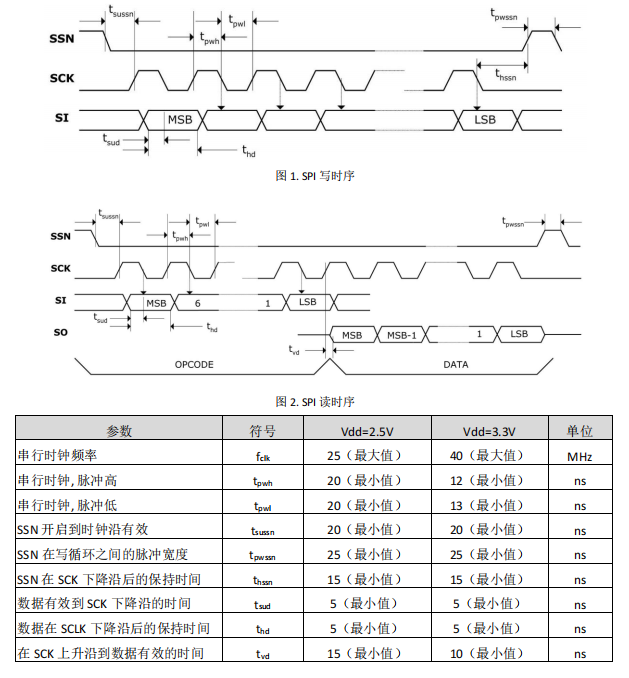
1. SPI接口
MS1005 的 SPI 接口是與 4 線制 SPI 兼容的,它需要一個 SerialSelectNot(SSN)信號,從而不能夠工
作在 3-線制 SPI 接口。
SSN 的下降沿或者第一個 SCK 的上升沿將會復位 INTN 管腳(中斷管腳)狀態。
從最高位(MSB)開始傳輸以最低位(LSB)結束。傳輸是以字節方式完成的。數據傳輸可以在每個字節
后停止,通過給 SSN 發送一個 LOW-HIGH-LOW 的電平。
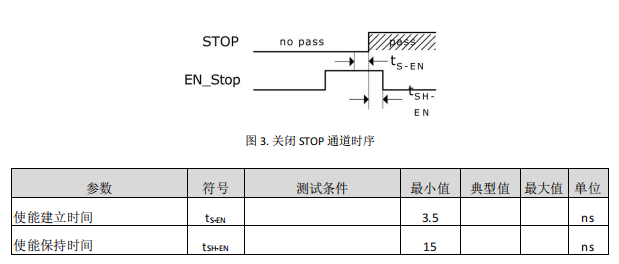
2. 關閉STOP通道的時序
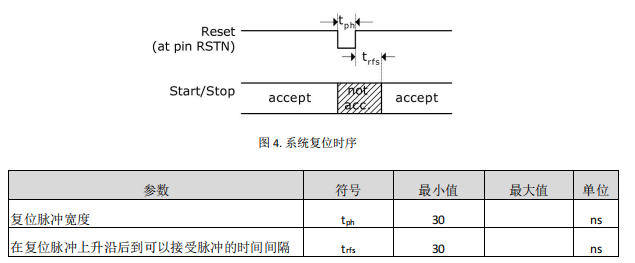
3. 系統復位時序
4. 電源電壓
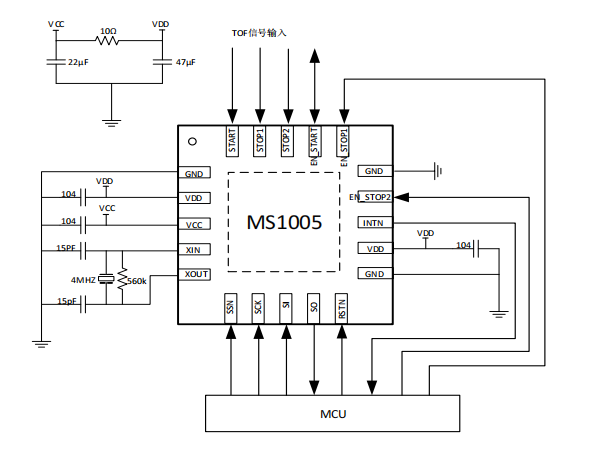
為了達到最佳測量效果,好的電源非常重要。電源應該具有高電容性和低電感性。MS1005 提供兩
對電源供應端口:VCC - I/O 供電電壓 ,VDD - 內核供電電壓。
所有的 Ground 引腳都應該連接到印刷電路板的地層上。 VCC 和 VDD 應該通過一個電池或者固定
的線性電壓調節器給出。不要應用開關式的調節器,避免由于 IO 電壓引起的干擾。
時間數字轉換器能夠有好的測量效果,完全取決于好的電源供電。芯片測量主要是脈沖式的電
流,因此一個充足的雙通濾波非常重要:VCC 47 μF(最小 22 μF),VDD 100 μF(最小 22 μF)。
電壓應用通過一個模擬的調節器給出,我們推薦不要使用開關式的電壓調節。
5. 操作碼及寄存器
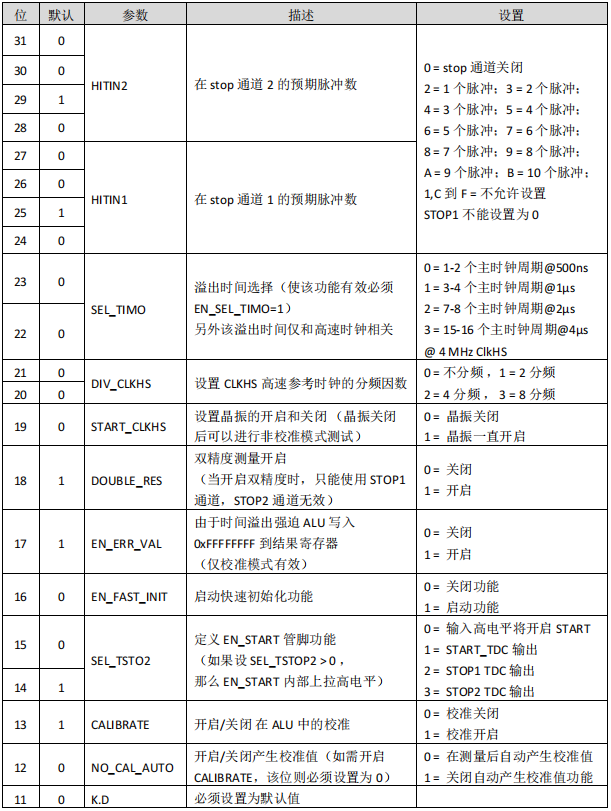
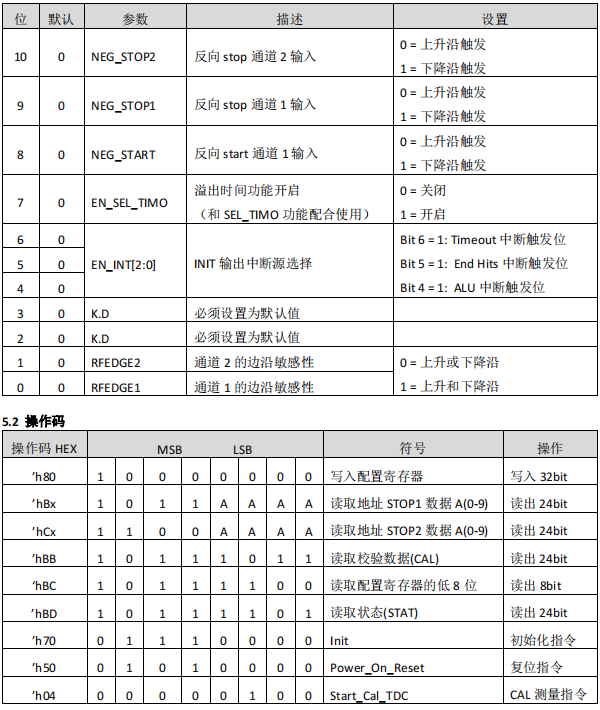
5.1 配置寄存器
MS1005 有 1 組 32 位的配置寄存器。
如有需求請聯系——三亞微科技 王子文(16620966594)
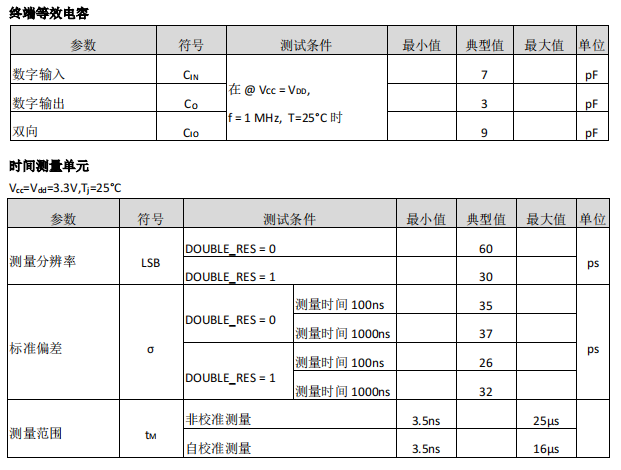
6. 時間測量
6.1. 概述
非校準模式測量范圍從 3.5ns 到 25μs(0-25μs 在兩個 stop 通道之間測量)。
校準模式單精度測量范圍從 3.5ns 到 16μs(0-16μs 在兩個 stop 通道之間測量)。
校準模式雙精度測量范圍從 3.5ns 到 4μs(0-4μs 在兩個 stop 通道之間測量)。
單精度模式典型精度為 60ps,2 個 stop 通道相對于 start 通道。
雙精度模式典型精度為 30ps,僅 stop1 通道相對應 start 通道。
內置特殊防抖技術,使測量時間高度精準。
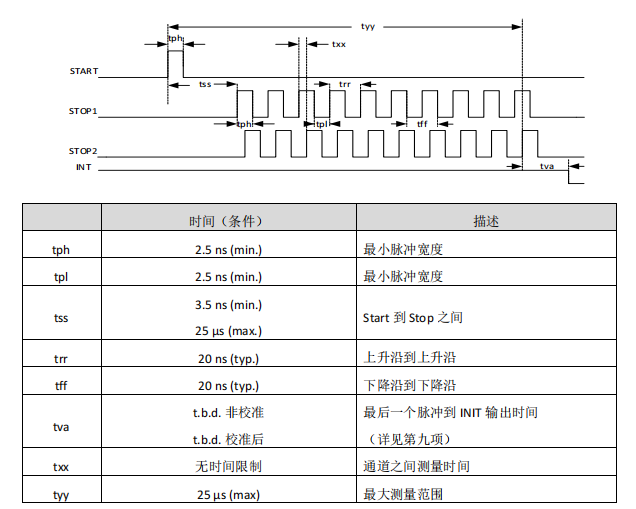
20ns 的脈沖之間最小間隔。
兩個 stop 通道可同時采集,且每個 stop 通道最多 10 個脈沖。
每個 stop 通道可選擇上升或下降沿捕獲,或者選擇上升和下降沿同時捕獲。
自動測量 START 和 STOP 脈沖之間的時間間隔,無需再進行寄存器設置。
可任意設置溢出時間,從而減少高速測量時溢出時間等待。
在非校準模式下,可以任意測量比預期脈沖數少的脈沖。
典型應用: 激光測距、激光雷達、高精度延時測量。
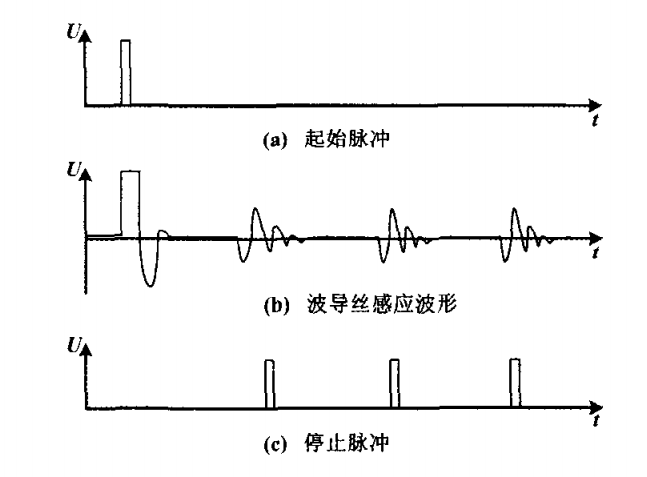
6.2. 高精度時間測量原理
數字式 TDC 應用內部的邏輯門延時來高精度測量時間間隔,下圖闡述了這種絕對時間 TDC 的測量
原理結構。該電路結構確保電路以特殊的測量方法,使信號通過邏輯門的時間可以非常精確。最高的
測量精度完全取決于內部通過邏輯門的傳播時間。
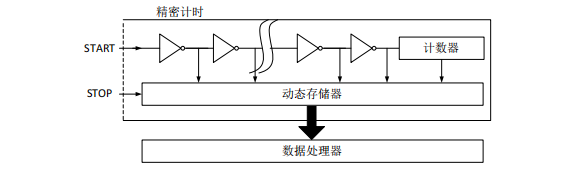
時間測量是通過一個 start 信號觸發,通過內部防抖處理后,TDC 的門電路開始高速計數,直到 stop
信號產生記錄計數結果,達到 STOP 預期脈沖數后停止計數。
3.3V 和 25°C 時,MS1005 的單精度最小分辨率是 60ps。溫度和電壓對門電路的傳播延時時間有很
大的影響。通常是通過校準來補償由溫度和電壓變化而引起的誤差。在校準過程中,TDC 測量 0.5 個
和 1.5 個時鐘周期,相減后得一個時鐘周期的 TDC 計數結果,即為校準值。測量范圍受計數器大小的
限制,以下是非校準模式下最大測量范圍:tyy = 60ps x 442368 ≈ 25μs。
每一個輸入端均可以被單獨設置成上升沿、下降沿或上下沿同時觸發有效。可通過設置寄存器的
bit8-10 位(EG_START,NEG_STOP1,NEG_STOP2)和寄存器的 bit0-1 位(REFDGEx) 來選擇觸發沿。
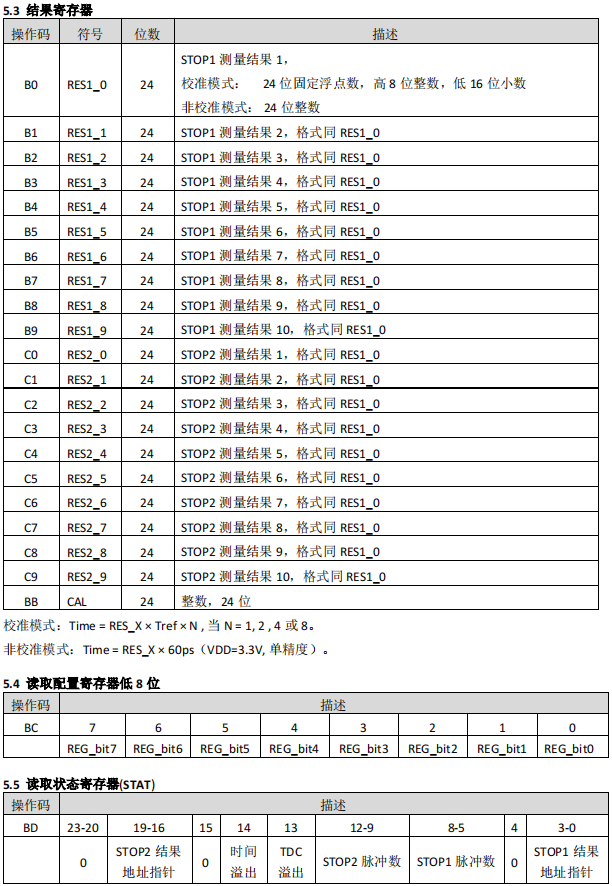
時間測量結束后,MS1005 會自動將各個脈沖的測量結果順序寫到相應的結果寄存器,無需再進
行寄存器操作設置,在計算結果的過程中先計算 STOP1 通道的脈沖,然后計算 STOP2 通道的脈沖,所
以當使用單通道時,必須使用 STOP1。
6.3. 非校準時間測量
6.3.1 非校準時間測量概述
非校準時間測量,實際上就是應用數字式 TDC 內部的邏輯門延時來實現高精度時間測量,非校準
模式下最大測量范圍是 3.5ns-25μs,單精度模式下,可以兩個 STOP 通道同時測量,且每個通道最多可
以測量 10 個 STOP 脈沖,雙精度模式下,僅 STOP1 通道可以使用。
非校準時間測量過程中,無需高速時鐘參與,所以可以通過寄存器設置來關閉高速時鐘
(START_CLKHS=0),在該模式下,測量速度最快,結果寄存器直接輸出門延時個數,在非校準模式下結
果寄存器 20 位的有效位,測量時間計算如下,該測量時間受溫度和電壓影響。
測量時間=RES_X × 60ps (DOUBLE_RES=0)
測量時間=RES_X × 30ps (DOUBLE_RES=1)
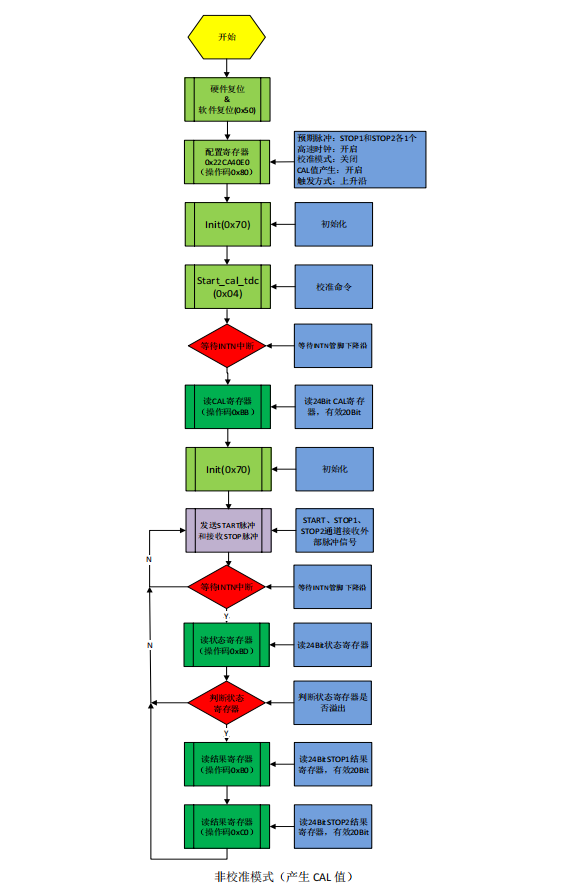
非校準模式下也可以實現時間測量和 CAL 值同時測量,在該模式下需要開啟高速時鐘
(START_CLKHS=1)和開啟自動校準(NO_CAL_AUTO=0),這樣就會測量時間的同時會產生一個 Tref× N 周期
的門延時個數,然后將 CAL 值 RES_Tref 存在指定的結果寄存器中。測量時間如下計算,該測量時間和
溫度和電壓無關,僅和高速時鐘抖動有關。
測量時間=RES_X/RES_Tref×Tref× N, N = 1,2,4,8
非校準模式測量溢出,當溢出時間功能關閉(EN_SEL_TIMO=0)的情況下,溢出時間相當于 TDC 溢
出,也就是要 25μs 后產生溢出,并且狀態寄存器 Bit13=1(TDC 溢出);當溢出時間功能開啟
(EN_SEL_TIMO=1)的情況下,溢出時間由溢出時間選擇(SEL_TIMO)進行設置,溢出時間僅和高速時鐘相
關,不受時鐘分頻(DIV_CLKHS)的影響,例如高速時鐘為 8MHz,SEL_TIMO=0 的情況下,溢出時間為
125ns,溢出時狀態寄存器 Bit14=1(時間溢出)。
非校準模式下,當測量脈沖個數小于預期脈沖個數時,可以正常輸出測量脈沖的值,雖然這時狀
態寄存器溢出,但測量到的脈沖產生的結果是正確的,這種應用可以解決在測距過程中多個不定目標
的問題。
6.3.2 寄存器設置
主要的設置為:
(1)選擇測量預期脈沖個數
寄存器 bit 31-28 設置 STOP2 預期脈沖個數 HITIN2=0 或者 2-B;
寄存器 bit 27-24 設置 STOP1 預期脈沖個數 HITIN1=2-B,不能設置為 0;否則無法開啟測量。
(2)選擇測量精度
寄存器 bit 18, DOUBLE_RES = 1 選擇雙精度模式,測量精度為典型 30ps,但僅有一個 stop 通道
可用。DOUBLE_RES = 0 選擇單精度模式,測量精度為典型 60ps,這時兩個 stop 通道都可用。
(3)校準選擇
在非校準模式下,校準將關閉,寄存器 bit 13 CALIBRATE=0;
(4)產生 CAL 值
在非校準模式下,可以選擇產生 CAL 值和不產生 CAL 值,寄存器 bit 12 NO_CAL_AUTO=0 時,產
生 CAL 值,NO_CAL_AUTO=1 時,不產生 CAL 值。
(5)溢出選擇
在非校準模式下,寄存器 bit 7 EN_SEL_TIMO=0 溢出時間關閉,這時溢出時間為 TDC 溢出,當
EN_SEL_TIMO=1 時開啟溢出時間,且溢出時間和寄存器 bit 23-22 SEL_TIMO 設置有關。
(6)選擇輸入觸發方式
可通過設置寄存器的 Bit 8-10(NEG_X)在每一個輸入端口(Start,Stop1,Stop2)邊沿觸發方式。當
RFEDGE=0 時,NEG_X=0 則上升沿觸發,NEG_X=1 則下降沿發。還可以通過設置寄存器的
Bit0&1(REFDGE1 & FEDGE2),選擇 STOP 由上升沿或下降沿單獨觸發(RFEDGE=0),還是上升沿和下降
沿同時觸發(RFEDGE=1),當 RFEDGE=1 時,Bit 9-10 選擇無效。
(7)中斷
中斷引腳 INTN 可以有不同的中斷源,在寄存器的 Bits4-6(EN_INT)中進行選擇,非校準模式選擇
bit 6 = 1 和 bit 5= 1;
Reg bit 4 = 1 ALU 已經準備好
Reg bit 5 = 1 預期脈沖個數全部被接收到
Reg bit 6 = 1 測量時間溢出
6.3.3 測量流程
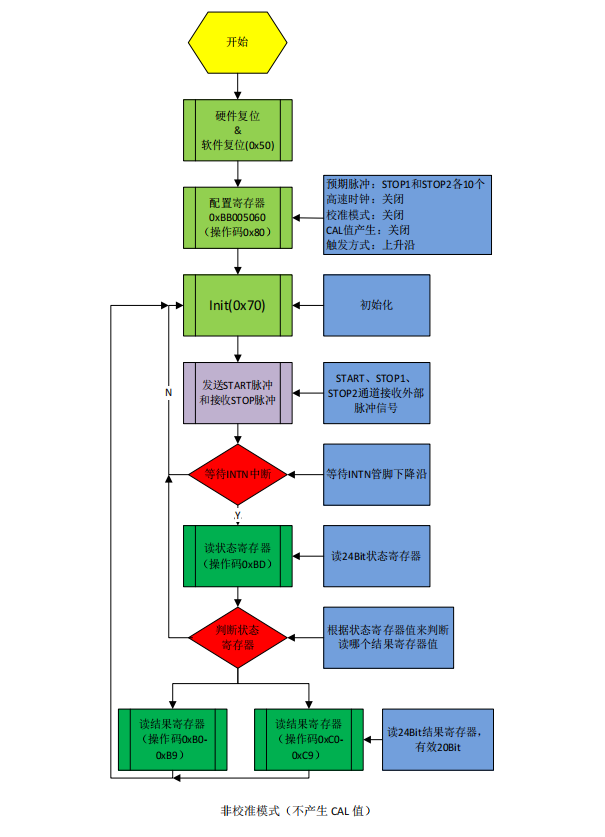
如有需求請聯系——三亞微科技 王子文(16620966594)
6.4 校準時間測量
注:校準測量單精度最大測量范圍 16μs,雙精度最大測量范圍 4μs。
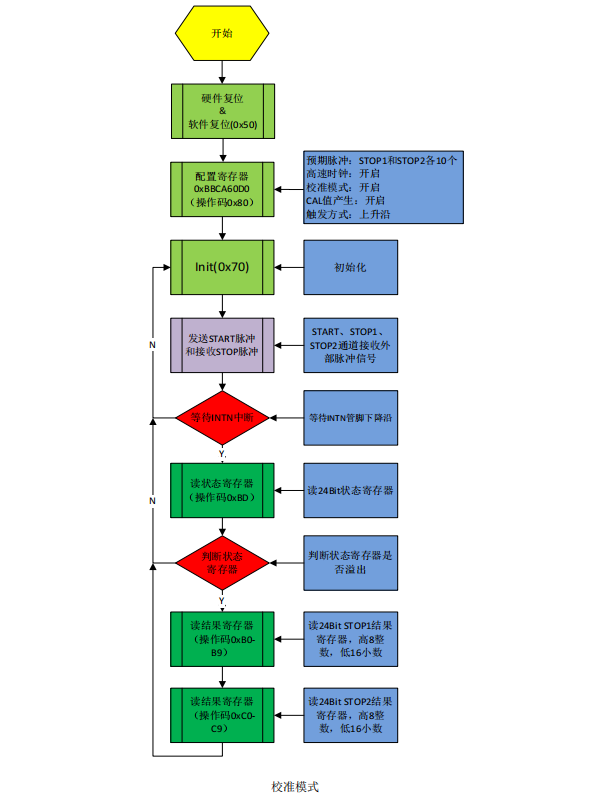
6.4.1 校準時間測量概述
校準時間測量,在高速振蕩器開啟情況下進行測量,測量的門延時數量和 Tref 門延時數量通過
ALU 進行計算并輸出到結果寄存器。輸出的結果為 24 位浮點數,高 8 位為整數位,低 16 位為小數
位。校準模式下最大測量范圍是 3.5ns-16μs,單精度模式下,可以兩個 STOP 通道同時測量,且每個通
道最多可以測量 10 個 STOP 脈沖,雙精度模式下,僅 STOP1 通道可以使用。
校準時間測量過程中,需要開啟高速時鐘(START_CLKHS=1)和校準開啟(CALIBRATE=1),當產生校準
值關閉(NO_CAL_AUTOCALIBRATE=1)結果寄存器輸出非校準值(可參考非校準部分介紹),當產生校準
值開啟(NO_CAL_AUTOCALIBRATE=0)時,結果寄存器輸出校準后的值 RES_X,測量時間如下計算,被測
時差不能超過 2 ×Tref× DIV_CLKHS。
測量時間= RES_X × Tref × N, N = 1, 2,4,8;
在校準時間測量中,必須開啟溢出時間功能(EN_SEL_TIMO=1),溢出時間由溢出時間選擇
(SEL_TIMO)進行選擇溢出時間,這里的時間僅和高速時鐘相關,不受時鐘分頻(DIV_CLKHS)的影響,例
如高速時鐘為 8MHz,SEL_TIMO=0 的情況下,溢出時間為 250ns,這時狀態寄存器 Bit14=1(時間溢
出)。
校準模式下,測量脈沖個數必須大于或者等于預期脈沖個數,當測量脈沖小于預期脈沖個數時,
ALU 不進行計算,這時狀態寄存器 Bit14=1(時間溢出)。且 EN_ERR_VAL=1 的情況下,結果寄存器 0
輸出全 F。
6.4.2 寄存器設置
主要的設置為:
(1)選擇測量預期脈沖個數
寄存器 bit 31-28 設置 STOP2 預期脈沖個數 HITIN2=0 或者 2-B;
寄存器 bit 27-24 設置 STOP1 預期脈沖個數 HITIN1=2-B,不能設置為 0;否則無法開啟測量。
(2)選擇測量精度
寄存器 bit 18, DOUBLE_RES = 1 選擇雙精度模式,測量精度為典型 30ps,但僅有一個 stop 通道
可用。DOUBLE_RES = 0 選擇單精度模式,測量精度為典型 60ps,這時兩個 stop 通道都可用。
(3)校準選擇
在校準模式下,高速晶振和校準都必須開啟,寄存器 bit 13 CALIBRATE=1 和 bit 19 START_CLKHS=1
(4)產生 CAL 值
在校準模式下,必須選擇產生 CAL 值,寄存器 bit 12 NO_CAL_AUTO=0 時,產生 CAL 值。
(5)溢出選擇
在校準模式下,必須開啟溢出,寄存器 bit 7 EN_SEL_TIMO=1 開啟溢出時間,且溢出時間和寄存
器 bit 23-22 SEL_TIMO 設置有關。
(6)選擇輸入觸發方式
可通過設置寄存器的 Bit 8-10(NEG_X)在每一個輸入端口(Start,Stop1,Stop2)邊沿觸發方式。當
RFEDGE = 0 時,NEG_X = 0 則上升沿觸發,NEG_X = 1 則下降沿發。還可以通過設置寄存器的
Bit0&1(REFDGE1 & FEDGE2),可以選擇 STOP 下降沿單獨觸發(RFEDGE=0),還是上升沿和下降沿同時
觸發(RFEDGE=1),當 RFEDGE=1 時,Bit 9-10 選擇無效。
(7)中斷
中斷引腳 INT 可以有不同的中斷源,在寄存器的 Bits4-6(EN_INT)中進行選擇,由于 Reg bit 5=1 中
斷輸出最早,Reg bit 4=1 輸出最晚,用戶可以根據實際情況進行選擇。
Reg bit 4 = 1 ALU 已經準備好
Reg bit 5 = 1 預期脈沖個數全部被接收到
Reg bit 6 = 1 測量時間溢出&TDC 溢出
(8)高速時鐘分頻
由于校準測量時間小于 2 ×Tref× DIV_CLKHS(Tref 只與外接高速晶振相關,如外接 4M,則 Tref =
250ns),所以需要測量時間增長的話,需要設置高速時鐘分頻,在寄存器的 Bits20-21(DIV_CLKHS)
中進行設置,但 2 ×Tref× DIV_CLKHS 不能超出測量范圍最大值 16μs。
6.4.3 測量流程
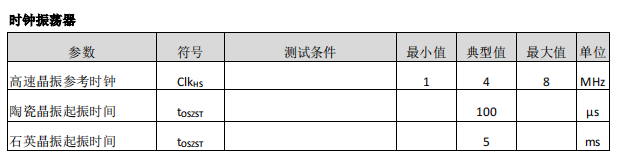
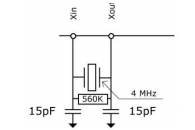
7. 高速振蕩器
MS1005 在校準模式下需要高速時鐘用于校準采樣, 通常 MS1005 會需要一個高速時鐘單元進行
校準,頻率范圍 1-8MHz,推薦高速時鐘頻率為 4MHz。
晶振在一直起振的狀態下,平均工作電流為 220 μA。但是晶振僅在測量時間的時候需要開啟,
MS1005 可以通過內部電路控制晶振的開啟和關閉。設置是通過設置參數 START_CLKHS 來實現。
START_CLKHS = 0 晶振關閉
= 1 晶振持續開啟
通過關閉晶振這種方式電流消耗可以大大被降低。
8. 快速初始化
MS1005 提供了快速初始化的功能。設置寄存器的 bit16(EN_FAST_INIT)=1,中斷標志會自動初始化
TDC。因此在讀出數據時 TDC 就已經準備好進行下次測量了。這種模式只適用于高速應用中。這對于
只有一個 STOP 信號的非校準測量模式下尤其適合。在快速初始化模式下,狀態寄存器的值永遠是 0,
所以無需再讀狀態寄存器。
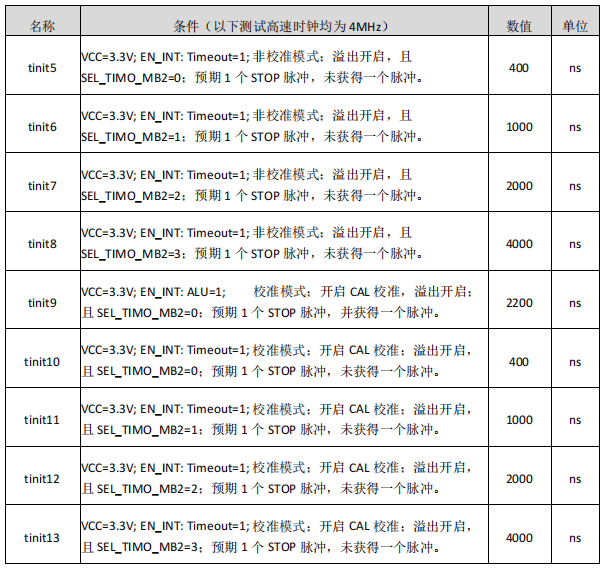
INTN 不同模式下產生時間
INIT 是整個測試流程的重要標志位,INTN 是和 EN_INT[2:0]來配合使用,不同的中斷源輸出中斷時
間不一樣,如下圖 tva 的時間為 INTN 產生時間,具體如下:
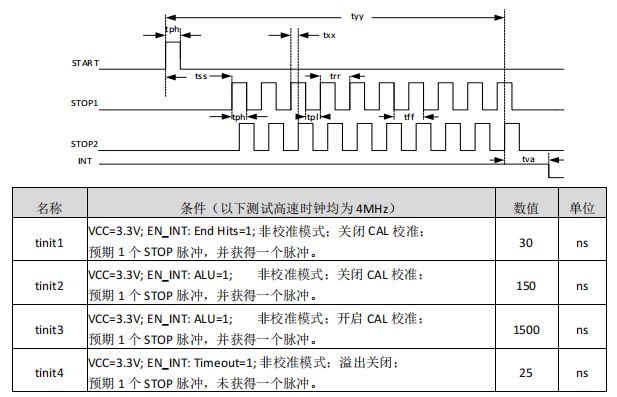
如有需求請聯系——三亞微科技 王子文(16620966594)
典型應用圖
MS1002&MS1022&MS1005 主要性能對比
封裝外形圖
QFN20
——愛研究芯片的小王
審核編輯 黃宇
-
高精度
+關注
關注
1文章
631瀏覽量
25939 -
激光測距
+關注
關注
9文章
169瀏覽量
28122 -
時間測量
+關注
關注
0文章
11瀏覽量
6421
發布評論請先 登錄
高精度激光測距傳感器:工業精密測量的“隱形守護者”
瑞盟科技--光通信與光電領域芯片應用解決方案
MS多傳感器/激光測試系統:可進行MTF、MRTD高精度測試

TDC-GP22在磁致伸縮位移傳感器中的應用
淺談瑞盟科技·MS1030——超聲波流量高精度測量電路
行業知識 | CMOS激光位移傳感器如何實現高精度測量?

使用TDC去測量pwm兩個波形相位延時時間,如何去設計TDC7201的外圍電路?
TDC芯片數據手冊及官方參考例程
MS1205N——激光測距用高精度時間測量(TDC)電路
MS1022——高精度時間測量(TDC)電路

激光測距傳感器的安裝方式有哪些
TDC7201適用于激光雷達、測距儀和ADAS中飛行時間應用的時間-數字轉換器數據表






 工商網監
工商網監
評論