") 基于望獲實時Linux的高性能運動控制器適配
基于望獲實時Linux的高性能運動控制器適配
在快速迭代的工業(yè)自動化與機器人控制領域,高性能運動控制器無疑是實現(xiàn)極致精度與效率的核心引擎。實時操作系統(tǒng)(Real-Time Operating System,RTOS)憑借其低延遲與高度確定性的特性,成為這些高精度、高速度應用的首選平臺。
望獲實時Linux,作為Linux通用性與望獲實時增強技術的完美結(jié)合,為高性能運動控制器的適配開辟了新紀元。本文旨在深入探討基于望獲實時Linux的適配策略,涵蓋實時任務編程、運動控制算法實現(xiàn),以及望獲實時Linux如何為高性能運動控制器提供強大支持。
高性能運動控制器
高性能運動控制器是現(xiàn)代工業(yè)自動化的心臟,它們以高精度、高速度、實時控制及高度靈活性著稱,廣泛應用于數(shù)控機床、機器人、自動化裝配線及先進醫(yī)療設備等領域。這些控制器通過精確控制位置、速度和加速度,確保生產(chǎn)過程的穩(wěn)定與高效。具體而言,特點如下:
高精度:滿足半導體制造、醫(yī)療設備等領域?qū)O端精度的需求。
高速度:提升生產(chǎn)效率,縮短生產(chǎn)周期。
實時控制:確保時間敏感任務的無縫執(zhí)行,如機器人手術和高速包裝。
靈活性:支持多種控制算法,適應不同應用場景的定制化需求。
高性能的典型應用有:
數(shù)控機床:在數(shù)控機床中,高性能運動控制器用于控制刀具的精確運動,以確保加工零件的高精度和高表面質(zhì)量。
機器人:在機器人應用中,這些控制器用于控制機器人關節(jié)的運動,使機器人能夠執(zhí)行復雜的任務,如組裝、焊接和搬運。
自動裝配線:在自動化裝配線上,高性能運動控制器用于控制各種機械手和輸送系統(tǒng),確保各個部件的精確和同步運動,提高生產(chǎn)效率。
醫(yī)療設備:在醫(yī)療設備中,例如手術機器人和放射治療設備,這些控制器用于精確控制運動,以提高治療效果和病人的安全性。
高性能運動控制器在工業(yè)自動化和機器人技術中扮演著關鍵角色。通過提供高精度、高速度、實時控制和靈活性,這些控制器能夠滿足各種應用的嚴格要求,推動技術進步和效率提升。而高性能運動控制器的底層軟件平臺是實時操作系統(tǒng),底層實時操作系統(tǒng)的通用性、實時性、響應快速性和穩(wěn)定性直接決定了高性能運動控制器的精度、速度和靈活性。下圖[1]給出了操作系統(tǒng)與高性能運動控制器的關系。
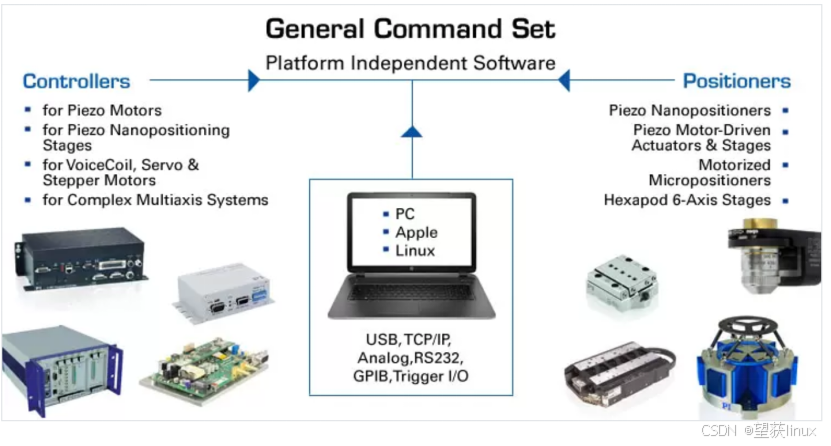
圖1 操作系統(tǒng)與高性能運動控制器的關系
實時任務編程、運動控制算法實現(xiàn)
在望獲實時Linux系統(tǒng)中,首先要編寫和配置實時任務,以確保運動控制的高性能和確定性。可以使用POSIX實時擴展(如pthread庫)創(chuàng)建和管理實時任務。例如:
1 #include
2 #include
3 #include
4 #include
5
6 void* real_time_task(void* arg) {
7 while (1) {
8 // 運動控制任務邏輯
9 // ...
10
11 // 控制周期
12 usleep(1000); // 1ms
13 }
14 }
15
16 int main() {
17 pthread_attr_t attr;
18 pthread_attr_init(&attr);
19 pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
20 pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
21
22 struct sched_param param;
23 param.sched_priority = 99; // 設置高優(yōu)先級
24 pthread_attr_setschedparam(&attr, ?m);
25
26 pthread_t thread;
27 if (pthread_create(&thread, &attr, real_time_task, NULL)) {
28 fprintf(stderr, "Error creating threadn");
29 return 1;
30 }
31
32 pthread_join(thread, NULL);
33 return 0;
34 }
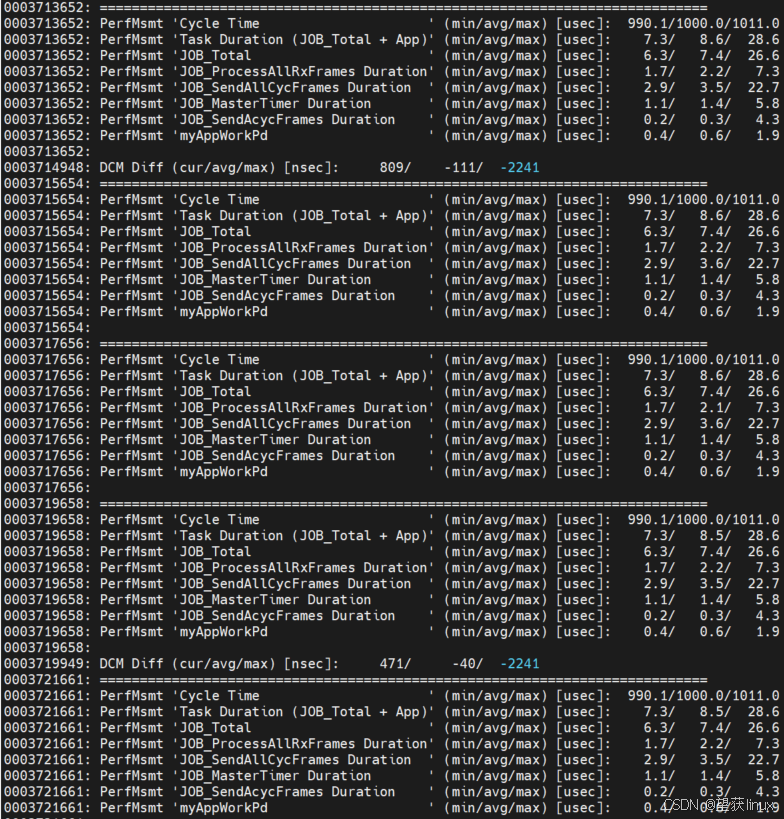
在上圖中,第17行-24行對運動控制線程的實時屬性進行了設置。第8行到第11行間歇性地對運動控制器發(fā)出控制命令,具體的控制指令通過EtherCAT等[2]協(xié)議傳輸。EtherCAT協(xié)議的特點是:使用標準以太網(wǎng)硬件和基礎設施:降低成本并簡化與現(xiàn)有系統(tǒng)的集成;采用主從構架:EtherCAT網(wǎng)絡由一個主設備控制,控制網(wǎng)絡,以及多個從設備執(zhí)行控制任務;EtherCAT提供快速通信,周期時間通常少于100微秒,非常適合要求嚴格的實時應用。
望獲實時Linux與高性能運動控制器的深度融合
在望獲實時Linux平臺上,實時任務的編程是實現(xiàn)高性能運動控制的基礎。通過利用POSIX實時擴展(如pthread庫),開發(fā)者可以高效創(chuàng)建和管理實時任務,確保控制邏輯的精確執(zhí)行。同時,望獲實時Linux提供的豐富API和工具集,簡化了運動控制算法的部署與調(diào)試過程。
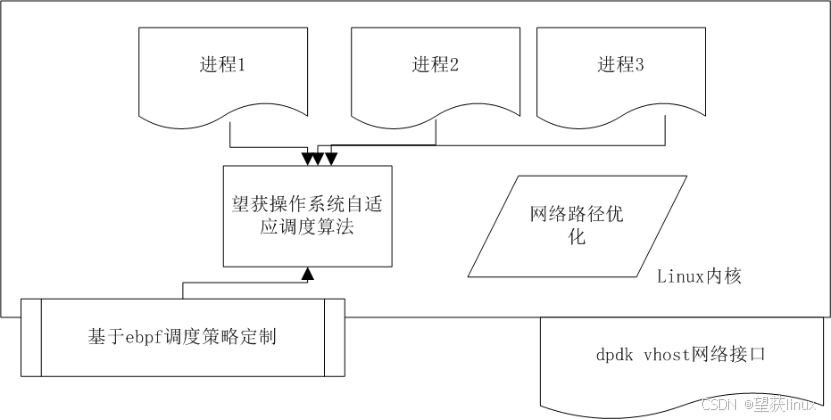
圖2 望獲實時Linux實時增強機制
望獲實時Linux不僅繼承了Linux的廣泛兼容性和強大功能,還通過一系列創(chuàng)新技術進一步提升了實時性能。其核心優(yōu)勢包括:
自適應調(diào)度算法:在Linux PREEMPT-RT基礎上,引入CPU使用率、內(nèi)存及I/O統(tǒng)計等多維度考量,實現(xiàn)更智能的調(diào)度決策。通過ebpf技術,用戶可靈活定義調(diào)度策略,以適應復雜多變的控制場景。
dpdk vhost網(wǎng)絡接口:顯著降低網(wǎng)絡延遲,提升控制精度,尤其適用于分布式控制系統(tǒng)。
內(nèi)核網(wǎng)絡路徑優(yōu)化:減少不必要的開銷,確保控制指令的快速傳輸與處理。
在數(shù)控機床、機器人、自動化裝配線及醫(yī)療設備等領域,基于望獲實時Linux的高性能運動控制器已展現(xiàn)出卓越的性能。通過實踐驗證,該技術方案不僅提升了控制精度與速度,還增強了系統(tǒng)的實時性與穩(wěn)定性,為工業(yè)自動化與機器人技術的進一步發(fā)展奠定了堅實基礎。
總結(jié)
國科環(huán)宇依托深厚的技術積累與實戰(zhàn)經(jīng)驗,成功推出了基于望獲實時Linux的高性能運動控制器適配方案。該方案不僅保留了Linux的通用性與兼容性,還通過自研的調(diào)度算法、網(wǎng)絡優(yōu)化技術及先進的網(wǎng)絡接口技術,實現(xiàn)了高性能、高實時性、高精度與高魯棒性的完美結(jié)合,為工業(yè)自動化與機器人技術的未來發(fā)展注入了強勁動力。
?可點擊進入望獲實時Linux官網(wǎng)試用:
https://www.onewos.com/
審核編輯 黃宇
-
控制器
+關注
關注
114文章
16933瀏覽量
182727 -
機器人
+關注
關注
212文章
29421瀏覽量
211342 -
Linux
+關注
關注
87文章
11446瀏覽量
212678 -
數(shù)控機床
+關注
關注
19文章
812瀏覽量
47642
發(fā)布評論請先 登錄

EtherCAT運動控制器實時數(shù)據(jù)的Qt示波器

低空視頻傳輸在望獲實時linux系統(tǒng)上的應用
望獲實時Linux系統(tǒng)與Betaflight的結(jié)合:計算與飛控的完美協(xié)作

基于國產(chǎn)化鴻道Intewell操作系統(tǒng)的高性能實時運動控制解決方案
工控強芯 望獲實時Linux+飛騰E2000Q CPU=1毫秒控制周期最大抖動僅7微秒

工控重磅|望獲實時Linux適配AnyControl,大大提升高級控制+實時性
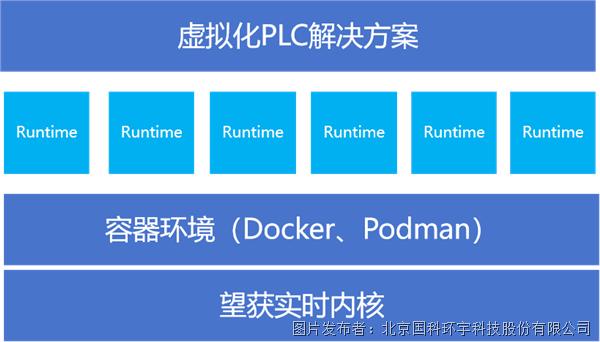
望獲實時Linux-虛擬化PLC解決方案
望獲實時Linux與EtherCAT的硬實時解決方案
基于望獲實時Linux和飛騰E2000Q CPU的全國產(chǎn)工控解決方案


- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業(yè)應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設備
- 機器人
- 安全設備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 華秋
- 關于我們
- 投資關系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應鏈服務 PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論