") 東南大學(xué)利用Moku:Pro跟蹤MEMS應(yīng)用諧振頻率并穩(wěn)定輸出信號(hào)幅值
東南大學(xué)利用Moku:Pro跟蹤MEMS應(yīng)用諧振頻率并穩(wěn)定輸出信號(hào)幅值
簡(jiǎn)介與挑戰(zhàn)
微機(jī)電系統(tǒng)(MEMS)利用硅的電學(xué)和機(jī)械特性,將機(jī)械結(jié)構(gòu)和電子結(jié)構(gòu)集成在一起,用于檢測(cè)加速度、旋轉(zhuǎn)、角速度等。MEMS設(shè)備的核心組件包括一個(gè)垂直懸掛于設(shè)備運(yùn)動(dòng)方向的質(zhì)量塊,在其框架內(nèi)驅(qū)動(dòng)方向上共振。通過(guò)測(cè)量框架在感應(yīng)方向上的運(yùn)動(dòng),可以檢測(cè)到由旋轉(zhuǎn)運(yùn)動(dòng)引起的科里奧利加速度。
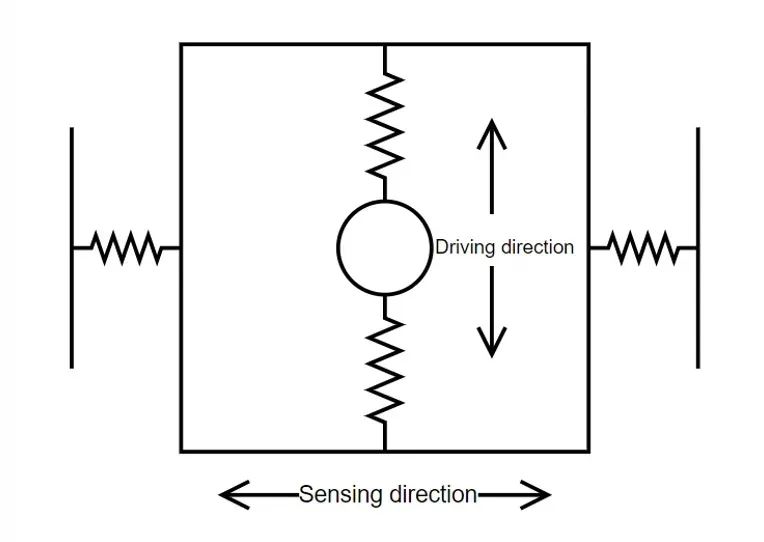
圖 1:一個(gè)質(zhì)量塊懸掛在可水平移動(dòng)的中心框上。通過(guò)測(cè)量框架的運(yùn)動(dòng),可以感知科里奧利力的大小和方向。
MEMS器件之間通常存在差異,這會(huì)給其特性測(cè)量和精確旋轉(zhuǎn)測(cè)量帶來(lái)挑戰(zhàn)。對(duì)這些設(shè)備進(jìn)行表征和內(nèi)部測(cè)量需要多種儀器來(lái)完成。例如,使用頻率響應(yīng)分析儀檢測(cè)共振、鎖相環(huán)(PLL)用于跟蹤諧振頻率、PID 控制器用于振幅穩(wěn)定的以及鎖相放大器用于測(cè)量設(shè)備對(duì)運(yùn)動(dòng)的響應(yīng)。在此示例中,中國(guó)東南大學(xué)的研究人員使用了三個(gè)獨(dú)立的鎖相放大器和一個(gè) PID 控制器(全部都在 Moku:Pro 中)來(lái)跟蹤其 MEMS 設(shè)備的性能并使其穩(wěn)定。
Moku:Pro具備低噪聲輸入性能,為 MEMS 系統(tǒng)控制和表征提供了全面的集成解決方案。在多儀器并行模式下支持同時(shí)組合運(yùn)行多達(dá)4種獨(dú)立儀器功能并提供超過(guò) 14 種可選測(cè)試儀器功能,涵蓋了上述所有MEMS應(yīng)用必要的儀器功能,同時(shí)還包括如用于激光頻率穩(wěn)定的激光鎖頻/穩(wěn)頻器和用于精確相位敏感測(cè)量的相位計(jì)功能。
MEMS測(cè)控系統(tǒng)架構(gòu)
為了精確跟蹤和穩(wěn)定 MEMS 設(shè)備,實(shí)驗(yàn)人員將MEMS器件分為兩部分,驅(qū)動(dòng)部分(Drive Mode: X)以及感知部分(Sensing Mode: Y)。兩部分隨后被分為反饋穩(wěn)定驅(qū)動(dòng)信號(hào)通路以及信號(hào)檢測(cè)。X部分擁有一個(gè)信號(hào)激勵(lì)輸入(Drive Signal)以及反饋信號(hào)輸出(Feedback)。激勵(lì)信號(hào)負(fù)責(zé)將器件穩(wěn)定在其諧振頻率(Resonator Natural Frequency)上并且穩(wěn)定其輸出信號(hào)的幅值。由于器件的內(nèi)部沒(méi)有自發(fā)激勵(lì)信號(hào),所以需要有一個(gè)外部信號(hào)源為器件提供一個(gè)初始的激勵(lì)信號(hào)。通過(guò)檢查驅(qū)動(dòng)信號(hào)和反饋信號(hào)之間的相位差,可以監(jiān)測(cè)驅(qū)動(dòng)信號(hào)頻率與共振器頻率之間的偏差。鑒于 MEMS 器件的相位響應(yīng)在驅(qū)動(dòng)頻率上是單調(diào)的,因此只有當(dāng)驅(qū)動(dòng)頻率與諧振器頻率精確重合時(shí),才會(huì)達(dá)到90°相移。這一過(guò)程強(qiáng)調(diào)了在系統(tǒng)內(nèi)建立全面反饋回路的必要性。該回路調(diào)節(jié)驅(qū)動(dòng)信號(hào)的頻率,以保持驅(qū)動(dòng)信號(hào)和反饋信號(hào)之間 90°的相位差,從而將其穩(wěn)定在諧振頻率上。閉環(huán)控制系統(tǒng)包括一個(gè)混頻器、低通濾波器、比例積分(PI)控制器和壓控振蕩器(VCO),這些組件集成為鎖相環(huán)(PLL)模塊。這一模塊在Moku多種儀器功能中,例如鎖相放大器、激光鎖頻/穩(wěn)頻器和相位計(jì)中均已經(jīng)具備集成了。
為了確保共振穩(wěn)定性,需要實(shí)現(xiàn)反饋信號(hào)幅度穩(wěn)定,以補(bǔ)償系統(tǒng)噪聲和溫度變化。我們首先設(shè)定目標(biāo)輸入信號(hào)振幅,然后由鎖相放大器測(cè)量輸出信號(hào)的振幅,如圖 2 所示。測(cè)量振幅與之間的差值成為反饋 PI 控制器的誤差信號(hào)來(lái)控制器件的驅(qū)動(dòng)信號(hào)輸入幅值進(jìn)而穩(wěn)定器件的輸出幅值。
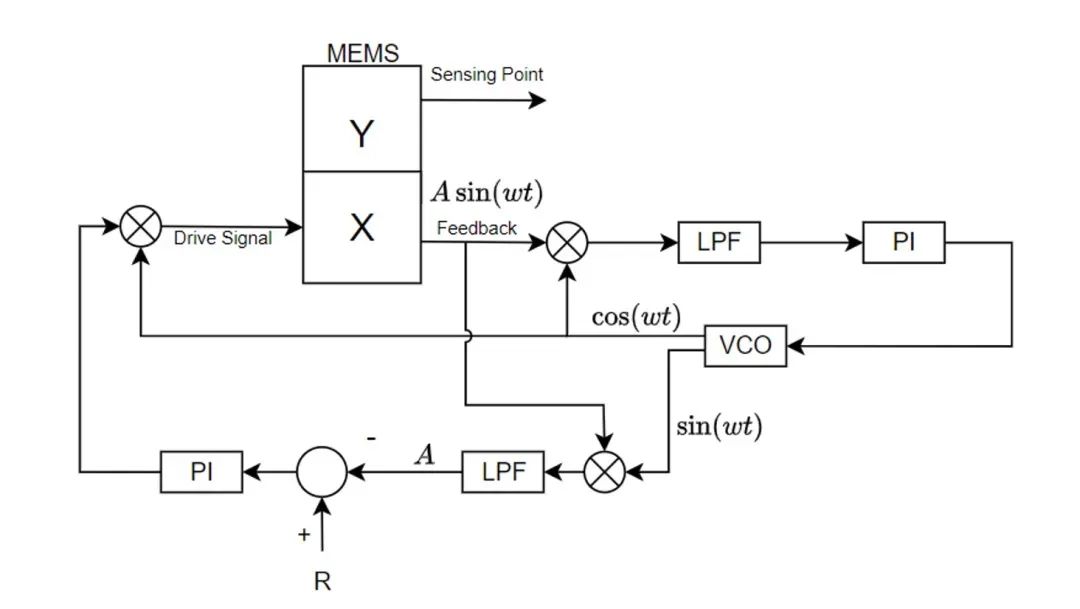
圖2:在MEMS系統(tǒng)中進(jìn)行共振跟蹤和幅度穩(wěn)定涉及將反饋信號(hào)通過(guò)兩條控制路徑傳輸。一條路徑包括VCO,專(zhuān)用于頻率跟蹤。另一條路徑表示目標(biāo)幅度 R用于穩(wěn)定振幅。LPF指的是低通濾波器,PI表示比例積分控制器,VCO表示壓控振蕩器。
實(shí)驗(yàn)流程
在此次實(shí)驗(yàn)當(dāng)中,Moku:Pro和MEMS器件之間的連接如圖3所示。器件的X部分輸入和輸出分別與Moku:Pro的輸出 1 和輸入 1相連構(gòu)成器件的驅(qū)動(dòng)反饋控制通路。插槽2中的鎖相放大器用于實(shí)時(shí)計(jì)算輸入信號(hào)的幅值,而隨后插槽3中的PID控制器接受幅值信息來(lái)產(chǎn)生幅值控制信號(hào)。需要注意的是,由于X通路的輸入輸出之間存在固有的90°相位差,我們配置了另一個(gè)鎖相環(huán)(PLL_2)以對(duì)PLL_1的sin(ωt)信號(hào)引入90°相移,從而生成幅度為1的cos(ωt)信號(hào)。隨后,插槽4中的第二個(gè)鎖相放大器的混頻器將cos(ωt)與PID控制器的控制信號(hào)進(jìn)行幅度調(diào)制,以控制驅(qū)動(dòng)信號(hào)的幅度,從而穩(wěn)定質(zhì)量塊諧振的幅度。
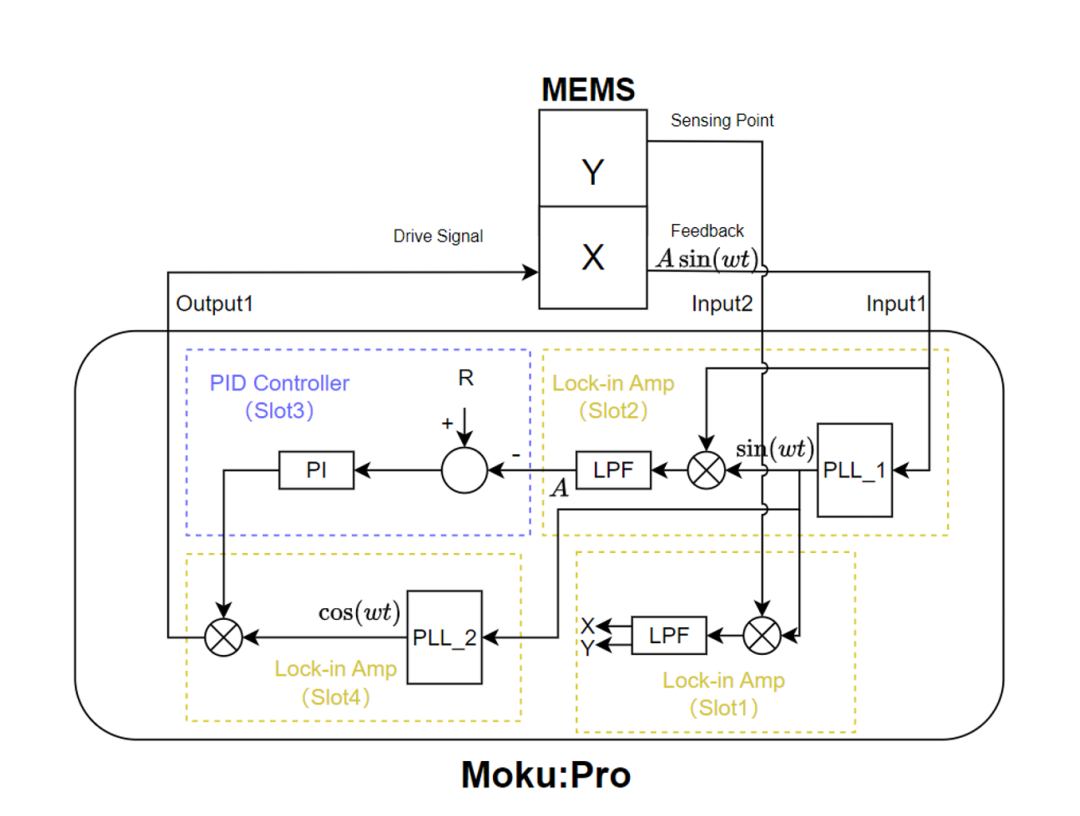
圖3:MEMS 和 Moku:Pro 工作流程:插槽 2 中的鎖相放大器檢測(cè)反饋信號(hào)振幅 A,然后將其傳輸?shù)讲宀?3 中的 PID 控制器,以產(chǎn)生控制信號(hào)。隨后,該控制信號(hào)與位于插槽 4 的鎖相放大器中的鎖相單元振幅信號(hào)混合。這一過(guò)程控制驅(qū)動(dòng)信號(hào)的振幅,以穩(wěn)定 MEMS 器件中質(zhì)量塊的諧振幅度。此外,槽 1 中還有一個(gè)額外的鎖相放大器,負(fù)責(zé)監(jiān)測(cè)傳感信號(hào)的響應(yīng)。
在實(shí)驗(yàn)中,Moku:Pro多儀器并行模式的四個(gè)插槽根據(jù)圖3所示的設(shè)計(jì)進(jìn)行配置。軟件界面配置如圖4截圖所示。相鄰的插槽之間通過(guò)配備的兩條實(shí)時(shí)信號(hào)總線進(jìn)行通信,可確保最佳的信號(hào)質(zhì)量,同時(shí)最大限度地減少延遲,并且不引入額外噪聲。模擬輸入標(biāo)記為 In 1 至 4,模擬輸出標(biāo)記為 Out 1 至 4。
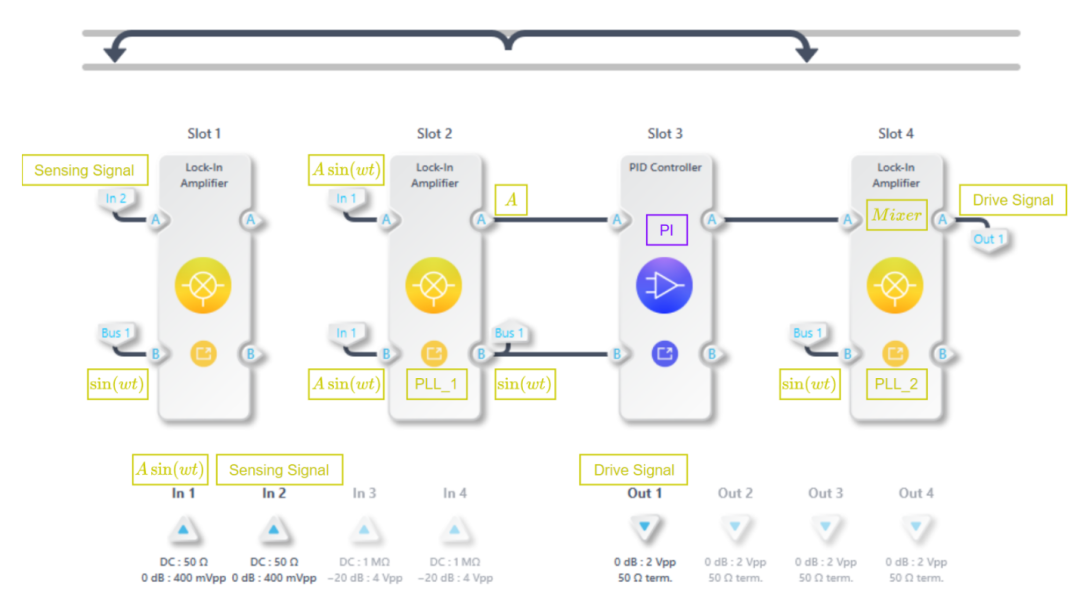
圖4: Moku:Pro多儀器并行配置軟件界面
圖5 描述了插槽2的鎖相放大器的配置,其中的極坐標(biāo)系轉(zhuǎn)換(用于計(jì)算信號(hào)幅值)以及鎖相環(huán)PLL(用于諧振頻率鎖定)都被啟用。其中的鎖相環(huán)配置為3.479 kHz的初始頻率以及100 Hz的跟蹤帶寬。輸入 B 信號(hào)和輸出 B 信號(hào)是同步的,這表明 PLL 正在正確跟蹤 MEMS 共振。鎖相放大器中的低通濾波器被配置為200 Hz以及24 dB/Oct的階數(shù),可以將混頻器輸出的高頻分量或sin(2ωt)信號(hào)有效地濾除。濾波以后的信號(hào)通過(guò)極坐標(biāo)系轉(zhuǎn)換后輸出的信號(hào)幅值會(huì)被作為PID控制器的輸入進(jìn)行幅值穩(wěn)定控制。
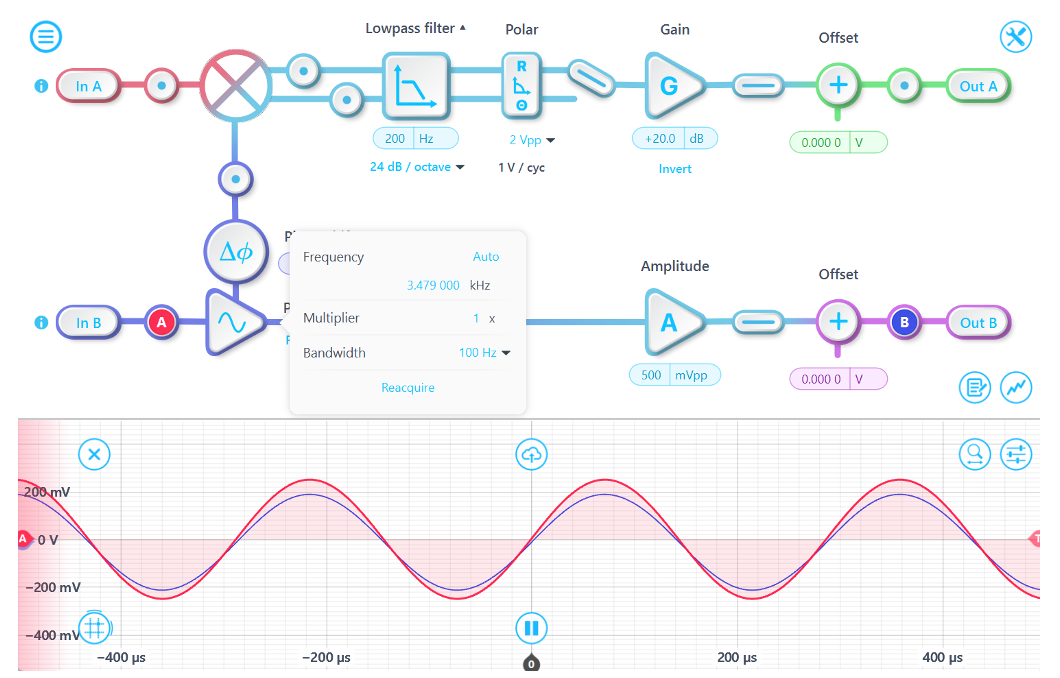
圖5:鎖相放大器(插槽2)操作界面: PLL 輸出信號(hào)(藍(lán)線)被穩(wěn)定地鎖定在PLL 輸入信號(hào)(紅線)上。In A 表示反饋信號(hào) A sin(ωt),Out A 是反饋信號(hào)的計(jì)算振幅 A,Out B 是振幅為 500 mVpp 的鎖相信號(hào) sin(ωt)。
在圖6中,插槽3中的PID控制器被配置為PI控制器將誤差信號(hào)的直流誤差控制在0附近。利用輸入控制矩陣,我們可以反轉(zhuǎn)輸入 A 信號(hào)的符號(hào),然后在輸入偏移上指定目標(biāo)值為 100.4 mV,使控制器模塊的輸入成為振幅誤差信號(hào)。其中的積分器交越頻率(I)被設(shè)置為3.125 Hz,比例增益(P)被設(shè)置為-24 dB以確保對(duì)溫度漂移進(jìn)行低帶寬控制。輸出偏移設(shè)置為 200 mV,以便在啟動(dòng) PID 控制器之前保持固定的初始振幅值,據(jù)觀察,MEMS器件的反饋信號(hào)的幅值被成功地控制在100.4 mV。
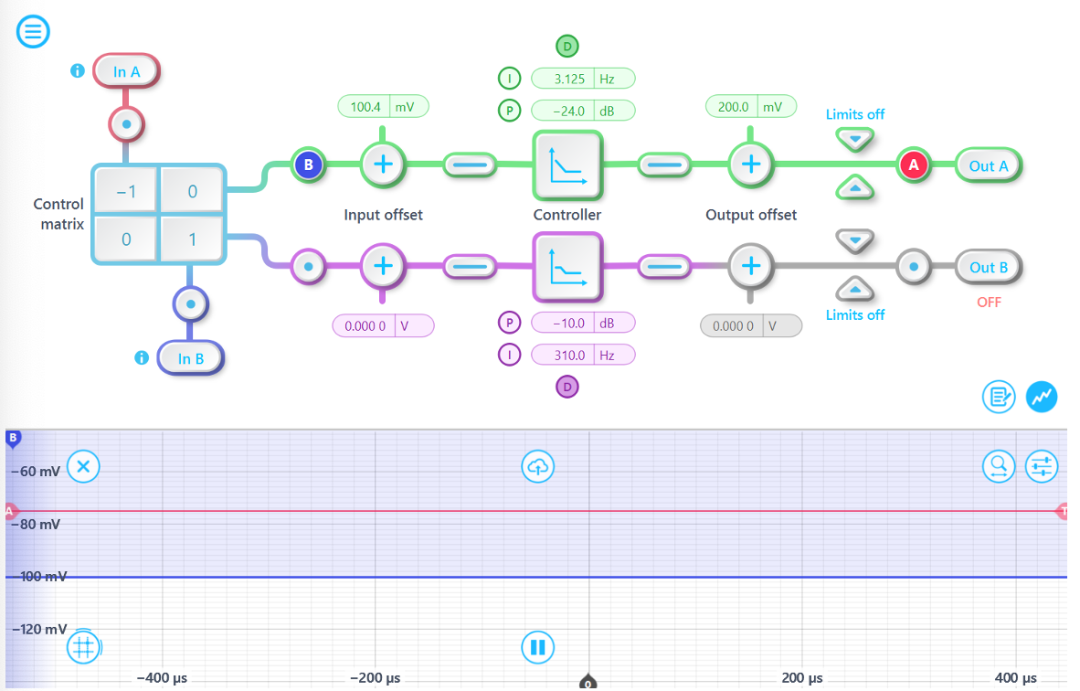
圖6: PID控制器(插槽3)通過(guò)控制驅(qū)動(dòng)信號(hào)幅值成功地將反饋信號(hào)的幅值穩(wěn)定在100.4mV
圖 7 描述了插槽 4 中鎖相放大器的配置。該鎖相放大器中的 PLL 的初始頻率和跟蹤帶寬與插槽 2 中的相同。不過(guò),我們對(duì)插槽 4 中的 PLL 進(jìn)行了 90°相移,以實(shí)現(xiàn)驅(qū)動(dòng)信號(hào)和反饋信號(hào)之間的相位偏移補(bǔ)償。
圖 7 中的 A 表示來(lái)自 PID 控制器的振幅控制信號(hào),該控制信號(hào)改變了 PLL 輸出信號(hào) cos(ωt)的振幅。低通濾波器截止頻率為 5 kHz 允許 cos(ωt)通過(guò),輸出端 A 連接到 X 信號(hào)路徑,以輸出同相分量。然后,輸出 A 連接到Moku:Pro 模擬輸出 1 端口,該端口連接到 MEMS 驅(qū)動(dòng)信號(hào)輸入端口。
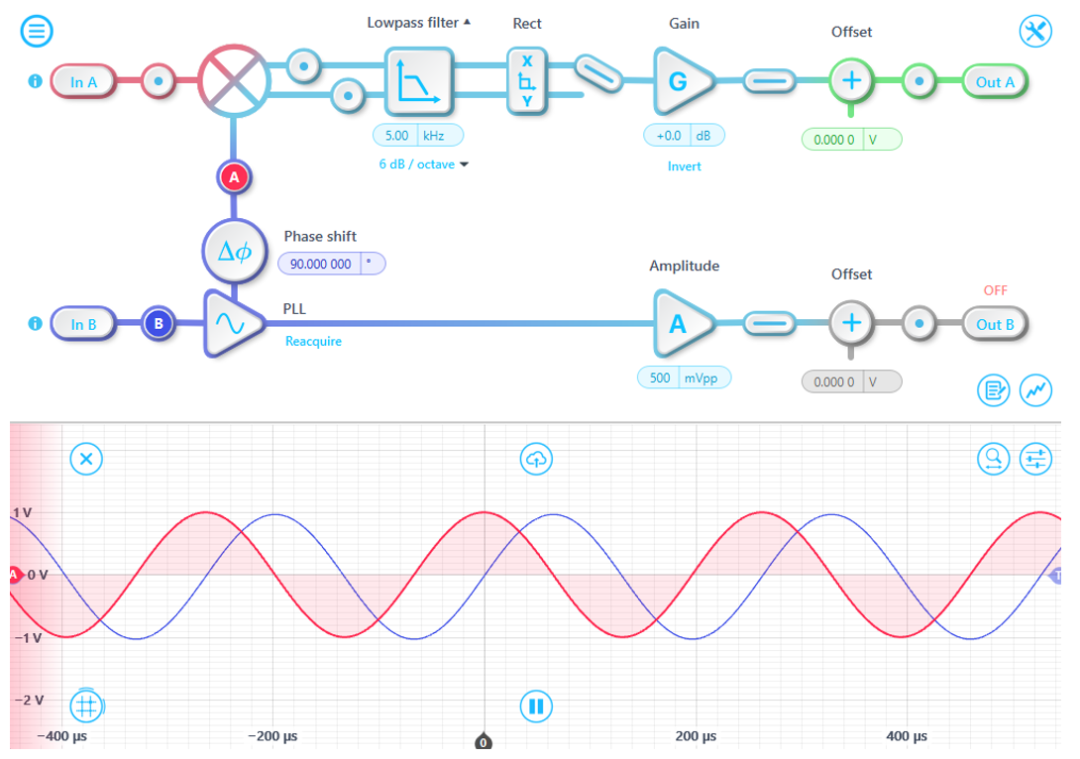
圖7:鎖相放大器(槽 4)將輸入 B 信號(hào) sin(ωt)相移 90°,以產(chǎn)生 cos(ωt)信號(hào),補(bǔ)償驅(qū)動(dòng)和反饋信號(hào)之間的相位差。重新生成的 cos(ωt)信號(hào)隨后進(jìn)行振幅調(diào)制,以穩(wěn)定質(zhì)量塊諧振幅度。
此時(shí),Moku:Pro 成功地驅(qū)動(dòng)并穩(wěn)定了 MEMS 器件,在共振頻率 3.480 kHz 時(shí)跟蹤探頭 A(紅色)上顯示的信號(hào),與預(yù)期的共振頻率 3.479 kHz 非常接近。此外,輸入反饋信號(hào)和設(shè)備輸出驅(qū)動(dòng)信號(hào)之間的 90°相位差也被準(zhǔn)確檢測(cè)到。
總結(jié)
在本次實(shí)驗(yàn)當(dāng)中,Moku:Pro展現(xiàn)了強(qiáng)大的實(shí)時(shí)信號(hào)處理能力,以及高度的靈活性。Moku:Pro利用多儀器并行模式完成了對(duì)器件的驅(qū)動(dòng),并且快速且穩(wěn)定地將器件鎖定在其諧振頻率上。其中使用到了包括三個(gè)鎖相放大器儀器和一個(gè) PID 控制器,所有這些都僅通過(guò)一個(gè)基于 FPGA 的設(shè)備Moku:Pro上部署。同時(shí)也完成了對(duì)器件的測(cè)量,其輸出完整地反應(yīng)了器件輸出對(duì)旋轉(zhuǎn)地響應(yīng)。總體上,驗(yàn)證了Moku:Pro在作為MEMS測(cè)量控制一體化的解決方案的可行性。
通過(guò)配置 Moku:Pro,已經(jīng)可以實(shí)現(xiàn)設(shè)備的完全驅(qū)動(dòng)和開(kāi)環(huán)信號(hào)的測(cè)量。此外,還可以結(jié)合外部混頻器或者額外Moku:Go 作為乘法器,拓展應(yīng)用在傳感軸上實(shí)現(xiàn)力平衡閉環(huán)(force-to-rebalance)。與市場(chǎng)上的同類(lèi)儀器相比,Moku:Pro 不僅展示了其出色的硬件性能,還憑借其高度的靈活性提供了一個(gè)系統(tǒng)級(jí)的解決方案。
-
mems
+關(guān)注
關(guān)注
129文章
4073瀏覽量
192785 -
微機(jī)電系統(tǒng)
+關(guān)注
關(guān)注
2文章
136瀏覽量
24148 -
諧振頻率
+關(guān)注
關(guān)注
2文章
45瀏覽量
17171
發(fā)布評(píng)論請(qǐng)先 登錄
玻色量子攜手東南大學(xué)發(fā)表量子計(jì)算應(yīng)用重磅論文

pcm4220在不同采樣頻率下,采集得到的信號(hào)的幅值變化較大,為什么?
DAC8806怎么調(diào)整輸出幅值及輸出頻率
我所知道的東南大學(xué)集成電路校友活動(dòng)歷史
PCM5141如何用miniDSP實(shí)現(xiàn)一個(gè)信號(hào)幅值檢測(cè)?
VCA810實(shí)現(xiàn)的模擬AGC為什么隨頻率增加,輸出的幅值增大?
FFT的幅值對(duì)應(yīng)的頻率點(diǎn)不對(duì)
使用THS3001時(shí)頻率上50M輸入信號(hào)的幅值增大輸出為什么會(huì)出現(xiàn)偏移?
OPA2171輸入信號(hào)頻率大于150kHz時(shí),輸出信號(hào)幅值衰減,為什么?
有什么模塊或系統(tǒng)可以實(shí)現(xiàn)頻率的自動(dòng)跟蹤?
spwm載波頻率和幅值怎么確定
CD4046設(shè)計(jì)頻率調(diào)制信號(hào)電路,不接入調(diào)制信號(hào)時(shí)VCO輸出頻率不穩(wěn)定,無(wú)法調(diào)整載波頻率在一個(gè)固定的值上怎么處理?
串聯(lián)諧振的應(yīng)用在哪里
XTR111增大Vin輸入信號(hào)頻率,輸出波形失真且幅值衰減是怎么回事?
回路的諧振頻率與哪些參數(shù)有關(guān)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論