 如何使用PWM控制電機速度
如何使用PWM控制電機速度
一、什么是伺服電機?
伺服電機是一種能夠精確控制其位置、速度和加速度的電機。它接收來自控制器的指令信號,并據此調整其輸出,以達到對機械設備或系統的精確控制。伺服電機的工作原理基于閉環控制系統,通過內部的反饋機制,實時監測電機的運行狀態,并與設定值進行比較,從而調整電機的輸出,確保實際運行與設定值一致。
伺服電機具有高精度、高響應速度、高穩定性等特點,廣泛應用于工業自動化、機器人技術、醫療設備、航空航天等領域。在工業自動化中,伺服電機常被用于數控機床、生產線等設備的精確控制;在機器人技術中,伺服電機則是機器人關節驅動的核心部件,使得機器人能夠靈活運動并實現復雜操作。
伺服電機可以控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。伺服電機轉子轉速受輸入信號控制,并能快速反應,在自動控制系統中,用作執行元件,且具有機電時間常數小、線性度高等特性,可把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。分為直流和交流伺服電動機兩大類,其主要特點是,當信號電壓為零時無自轉現象,轉速隨著轉矩的增加而勻速下降。
二、伺服電機如何工作?
伺服機構對于控制電機軸的精確運動起著重要作用。伺服電機內部帶有反饋和控制電路的閉環系統稱為伺服機構。
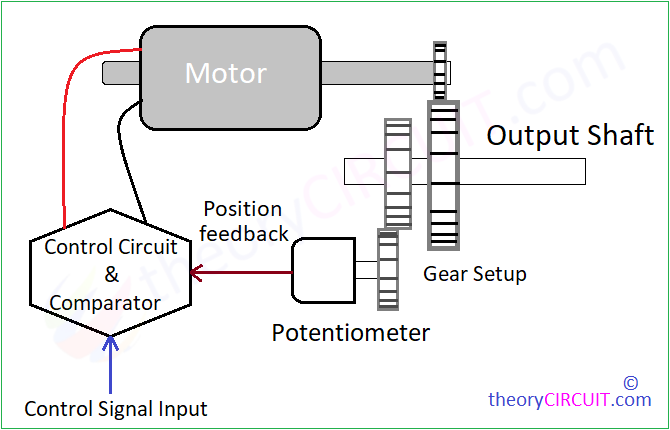
具有控制輸入信號和位置反饋的控制電路和比較器將為電機提供所需的偏置。根據接收到的偏置,電機軸將轉動(旋轉),附加的齒輪也旋轉,附加齒輪的360度電位器也旋轉并改變其電阻值,該電阻的變化作為位置反饋,比較器電路將其與控制進行比較信號并允許或限制電機偏置,并且重復此操作。
電機內部的伺服機構會通過控制電路接收所需的偏壓,并在接收到偏壓時開始旋轉軸,與軸相連的齒輪會增加扭矩,導致轉速下降,從而控制安全旋轉運動。當電機軸旋轉時,附有齒輪的電位器軸也隨之移動,通過比較器比較電位器(反饋信號)和控制信號(PWM)的供電,并將差值信號施加到控制電路,在此允許所需的直流電平電機采用PWM格式并進行精確旋轉。
微型伺服電機大多采用 5V DC 電源工作,需要 +V、Gnd 和 PWM 信號才能運行,通過使用受控 PWM 信號電路或微控制器和開發板 Arduino、Raspbery pi、ESP32 可以輕松連接和控制伺服電機ETC。,
伺服電機的旋轉角度取決于 PWM 信號中的 ON 時間(HIGH),因此我們可以編程或使用傳感器來產生具有所需 ON 時間的 PWM 信號,并在伺服電機軸上做出適當的旋轉運動。
正如您所看到的 PWM 信號(高),伺服電機軸以精確的角度旋轉,通過編碼和使用傳感器,我們可以驅動許多可能的應用。
三、如何使用 PWM 控制電機速度
直流電機的速度與電源電壓成正比。控制直流電機速度的一種簡單方法是通過脈寬調制 (PWM) 調節電源電壓。
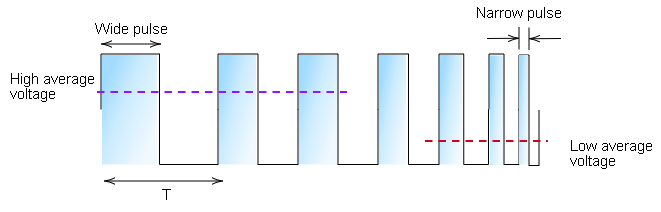
脈寬調制 (PWM)
PWM 背后的基本思想是它非常快速地打開和關閉電源電壓。通過調整 ON/OFF 脈沖的長度,我們可以將電壓設置為 0V 和最大電壓之間的任意位置。我們將使用該 PWM 信號直接為電機供電。
脈寬調制電機驅動器
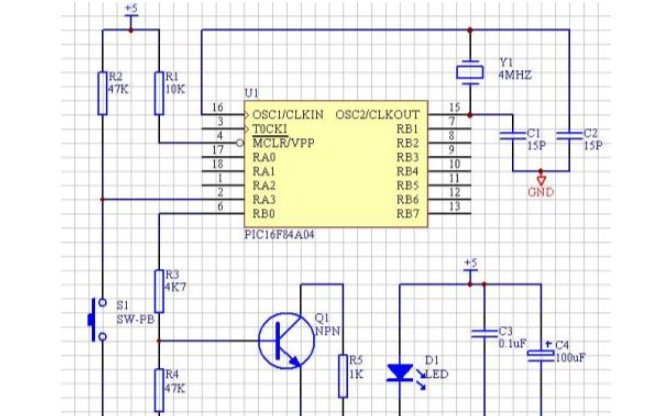
有多種方法可以為電機生成 PWM 信號,但在本教程中我們將使用555 定時器。這是電路原理圖:
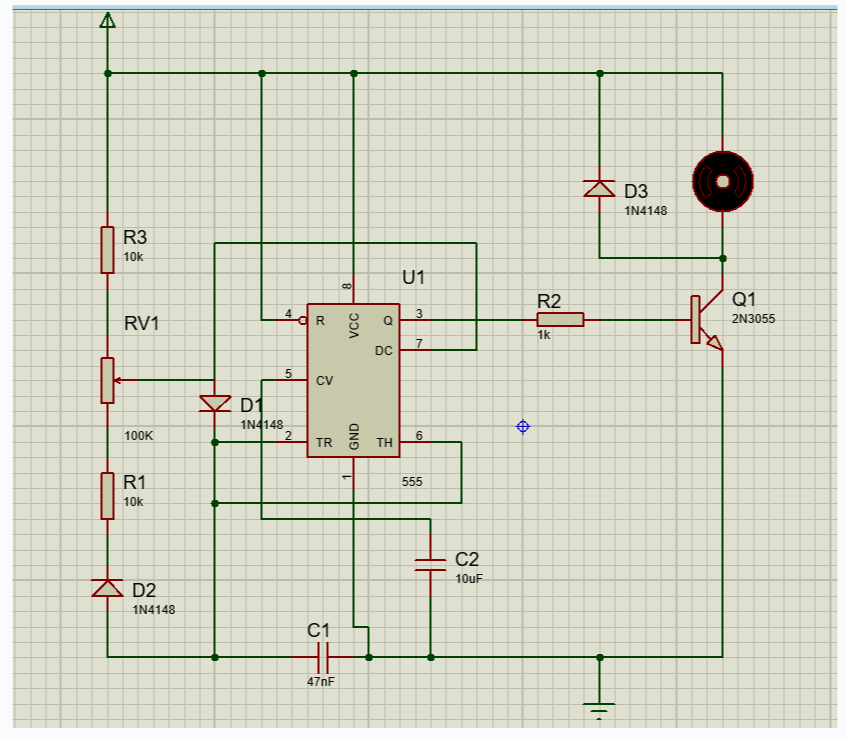
555定時器的輸出控制晶體管Q1的導通和截止。電容器C1通過電阻器R1和R3進行充電和放電。電容器充電或放電的時間取決于 R1 和 R3 的值。一旦電容器充電,它就會通過二極管D2 和可變電阻RV1 快速放電到引腳 7。在放電過程中,555 定時器的輸出下降到 0V,并“關閉”晶體管。轉動可變電阻可以調節電機的速度。
四、直流電機調速 PWM 電路圖
直流電機的應用非常廣泛,有些應用需要對直流電機進行速度控制,有些則需要控制旋轉方向。這里使用IC 555和電機驅動器IC L293D構建了簡單的直流電機速度控制 PWM 電路。
在下面的原理圖中,IC 555 定時器充當 PWM 發生器,H 橋電機驅動器 IC L293D 負責根據 PWM 輸入信號驅動電機。這里可以通過改變輸入引腳來改變電機旋轉方向。
脈寬調制信號
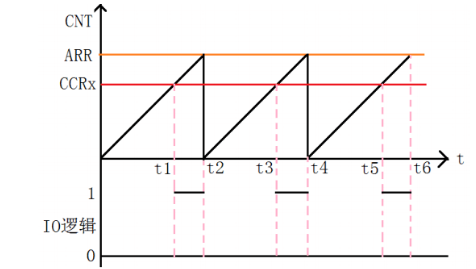
當我們向電機施加直流電源時,它開始旋轉軸,但我們無法控制其RPM(每分鐘轉數),當我們向直流電機施加 PWM 信號時,取決于 PWM 占空比,我們可以控制直流電機的 RPM。
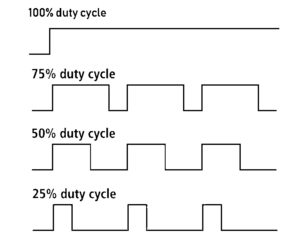
這里的占空比是一個周期內接通時間的百分比,并且取決于接通時間持續時間和脈沖計數電機速度(RPM)的變化。
H 橋操作
H橋或L293D等電機驅動IC用于將低功率控制信號轉換為足夠的信號來驅動電機并改變負載電機的供電方向。
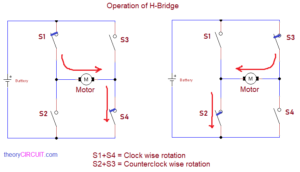
取決于開關的打開和關閉,電機獲得正向和反向供電,因此旋轉順時針或逆時針變化取決于開關位置,這就是 H 橋電機驅動器的工作原理。
電路原理圖
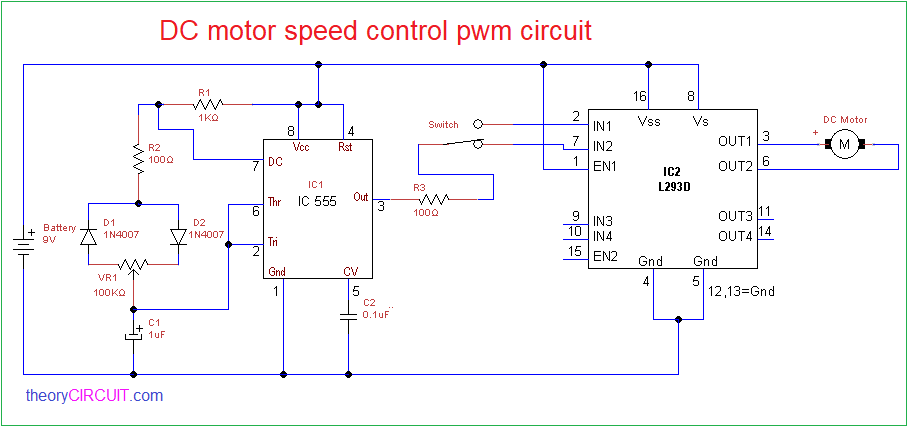
這里,定時器 IC 555 用作方波脈沖發生器,取決于可變電阻值,輸出脈沖寬度或占空比會發生變化,并且 IC 555 的輸出通過撥動開關直接應用于電機驅動器 H 橋 IC L293D。通過使用撥動開關我們可以改變L293D的輸入引腳。直流電機連接在 out 1 和 out 2 之間。
L293D電機驅動器
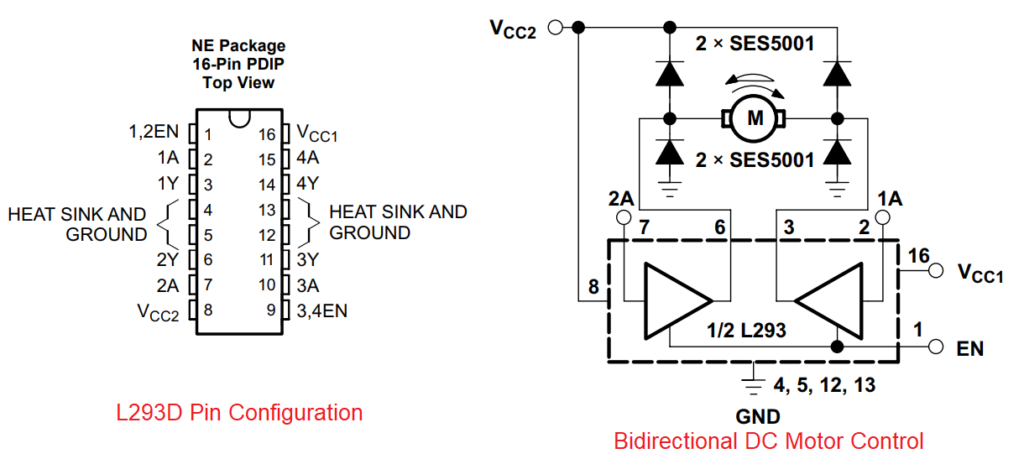
IC L293D 有 16 引腳,可以同時驅動兩個電機。該示意圖顯示了雙向直流電機控制。
五、伺服電機的三種控制方式
伺服電機作為一種高精度、高性能的驅動裝置,廣泛應用于各種自動化設備和精密制造領域。其控制方式的選擇直接關系到電機的運行性能和應用效果。本文將詳細介紹伺服電機的三種控制方式:轉矩控制、位置控制和速度控制,并結合實際應用案例,深入探討各種控制方式的原理、特點及應用場景。
1、轉矩控制
轉矩控制是伺服電機的一種重要控制方式,通過外部模擬量的輸入或直接的地址賦值來設定電機軸對外的輸出轉矩大小。具體而言,轉矩控制可以實現精確的力矩輸出,使得電機能夠按照預設的力矩大小進行工作。例如,當外部模擬量設定為5V時,電機軸輸出為2.5Nm(假設10V對應5Nm)。此時,如果電機軸負載低于2.5Nm,電機將正轉;當負載等于2.5Nm時,電機停止轉動;而當負載大于2.5Nm時,電機將反轉。
轉矩控制的特點在于其能夠實現對力矩的精確控制,從而確保電機在工作過程中始終保持穩定的輸出。這種控制方式主要應用于對材質受力有嚴格要求的纏繞和放卷裝置中,如饒線裝置或拉光纖設備等。在這些應用場景中,轉矩的設定需要根據纏繞半徑的變化隨時更改,以確保材質的受力不會隨著纏繞半徑的變化而改變。
2、位置控制
位置控制是伺服電機的另一種常用控制方式,主要通過外部輸入的脈沖頻率和脈沖個數來確定電機的轉動速度和位置。具體而言,位置控制模式通過脈沖的頻率來確定電機的轉動速度,而脈沖的個數則決定了電機轉動的角度。在某些伺服系統中,還可以通過通訊方式直接對速度和位移進行賦值。
位置控制的特點在于其對速度和位置都有很嚴格的控制精度。這種控制方式使得伺服電機能夠準確地到達預設位置,并在到達后保持穩定的輸出。因此,位置控制主要應用于需要高精度定位的裝置中,如數控機床、自動化生產線等。在這些應用場景中,伺服電機需要準確地控制工件的位置和姿態,以確保加工精度和產品質量。
3、速度控制
速度控制是伺服電機的第三種控制方式,主要通過模擬量的輸入或脈沖的頻率來控制電機的轉動速度。在有上位機控制裝置的外環PID控制時,速度模式也可以進行定位,但必須將電機的位置信號或直接負載的位置信號給上位機反饋以做運算用。
速度控制的特點在于其能夠實現對電機轉動速度的精確控制。通過調整模擬量的輸入或脈沖的頻率,可以輕松地改變電機的轉動速度。此外,速度控制還支持直接負載外環檢測位置信號,這樣可以減少中間傳動過程中的誤差,提高整個系統的定位精度。速度控制主要應用于需要快速響應和精確速度控制的場合,如機器人、無人機等。
綜上所述,伺服電機的三種控制方式各有特點和應用場景。轉矩控制適用于對材質受力有嚴格要求的纏繞和放卷裝置;位置控制適用于需要高精度定位的裝置;而速度控制則適用于需要快速響應和精確速度控制的場合。隨著自動化技術的不斷發展和應用領域的不斷拓展,伺服電機的控制方式也將不斷創新和完善。未來,我們可以期待更加智能化、高效化的伺服電機控制方式的出現,為自動化領域的發展注入新的動力。
-
PWM
+關注
關注
116文章
5375瀏覽量
218069 -
伺服電機
+關注
關注
87文章
2101瀏覽量
59150 -
控制電機
+關注
關注
0文章
244瀏覽量
18559
發布評論請先 登錄

深入理解PWM控制電機轉速的原理
PWM控制電機速度的基本原理
STM32通過PWM控制電機速度





 工商網監
工商網監
評論