") Copter E001系列MCU在感應(yīng)電機控制應(yīng)用中的實時基準(zhǔn)對比測試
Copter E001系列MCU在感應(yīng)電機控制應(yīng)用中的實時基準(zhǔn)對比測試
電機控制系統(tǒng)是一種典型的實時控制系統(tǒng),為了提高控制精度,需要盡可能地提高系統(tǒng)的響應(yīng)速度。實時微控制器(Microcontroller Unit,MCU)是實時控制系統(tǒng)的核心,配合一些外圍硬件電路組成了整個實時控制電路。忽略外圍硬件電路的響應(yīng)時間,影響實時控制系統(tǒng)響應(yīng)速度的主要因素是MCU響應(yīng)時間。MCU響應(yīng)時間主要包括內(nèi)部ADC的采樣時間、MCU外設(shè)的驅(qū)動延時、讀寫寄存器時間和應(yīng)用代碼運行時間。因此,MCU性能是決定實時控制系統(tǒng)響應(yīng)速度的最關(guān)鍵因素之一。

本文使用華太電子即將上市發(fā)布的Copter E001系列MCU HS32F7D377PTI(主頻300M,雙核),與具有壟斷地位的海外廠商競品28379(T公司,主頻200M,雙核)和H563(S公司,主頻250M,單核)進行感應(yīng)電機控制基準(zhǔn)對比 (Induction Motor Control, IMC) Benchmark測試。測試過程使用相同的應(yīng)用代碼及外設(shè)配置,用以對比三款MCU的軟硬件延時對感應(yīng)電機實時控制系統(tǒng)響應(yīng)時間的影響。

本次對比測試分別采用華太電子EVB_AllGpio_Production_V1.1評估板以及另外兩款MCU對應(yīng)的官方開發(fā)板,無外部輸入激勵信號,最終控制輸出形式為脈寬調(diào)制(Pulse Width Modulation,PWM)波。其中被控對象(異步電機)在MCU中使用軟件模型進行模擬,通過觀測控制精度(即電機速度響應(yīng))判斷實時控制系統(tǒng)的有效性(本文主要針對響應(yīng)時間,不做性能評估)。
圖2.1 搭載HS32F7D377PTI的EVB_AllGpio_Production_V1.1評估板

如圖3.1所示,MCU產(chǎn)生的PWM信號觸發(fā)ADC采樣,采樣完成后進入ADC中斷程序(上下文保存保護現(xiàn)場),讀取ADC結(jié)果并執(zhí)行電機控制算法,計算結(jié)束后更新MCU內(nèi)部的PWM比較寄存器,并退出中斷程序(恢復(fù)現(xiàn)場)。

圖3.1 信號流程圖

如圖4.1所示,測試應(yīng)用程序包括ADC采樣,CLARK變換,PARK變換,PID控制,PARK逆變換,感應(yīng)電機模型,CLARK逆變換及DA輸出,磁鏈及速度觀測器,空間矢量變換(Space Vector Generator, SVGEN)、PWM輸出。其中,感應(yīng)電機模型,CLARK逆變換及DA輸出部分是為了驗證控制效果,并實現(xiàn)電流閉環(huán),不做基準(zhǔn)對比測試。

圖4.1 應(yīng)用程序流程圖

5.1 ADC采樣及中斷響應(yīng)時間:從ADC觸發(fā)到完成ADC采樣并進入ADC中斷的時間。
5.2 應(yīng)用代碼執(zhí)行時間:讀ADC結(jié)果寄存器的時間、電機控制算法的執(zhí)行時間(即圖4.1中白色框圖代碼運行時間)、寫PWM寄存器時間。

6.1 ADC采樣及中斷響應(yīng)時間測試
如圖6.1所示,在固定點T1產(chǎn)生中斷觸發(fā)信號,在完成ADC采樣并進入ADC中斷后,立即讀取計數(shù)值T2,則△T=T2-T1就是ADC采樣及中斷響應(yīng)時間的總和。
6.2 應(yīng)用程序執(zhí)行時間測試
如圖6.1所示,在被測的功能模塊運行之前讀取計數(shù)值t1,在功能模塊運行后立即再次讀取計數(shù)值t2,則△t=t2-t1就是這個功能模塊實際運行的時間。
注意:
1.T1盡可能取小,計數(shù)周期設(shè)置盡可能大,避免T2或t2時刻超過當(dāng)前計數(shù)周期。
2.讀t1后不執(zhí)行任何代碼,立即讀一次t2,△t=t2-t1值為校正值,即測試誤差,每次計算需要減此誤差。
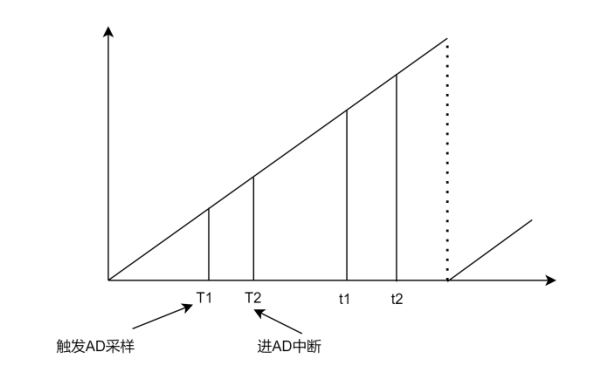
圖6.1 測試方法示意圖

表1:一組三角函數(shù)運算時間(軟件計算)
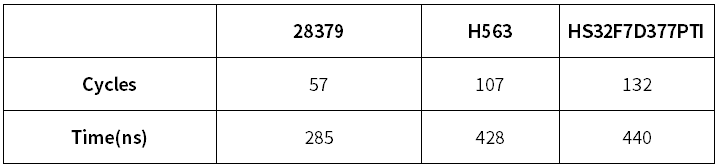
表2:AD采樣及中斷響應(yīng)時間
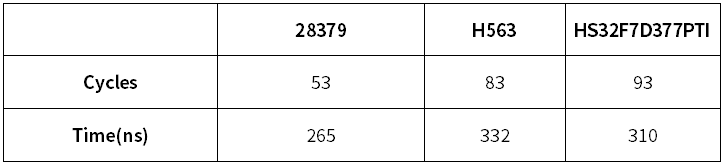
表3:算法執(zhí)行時間(計算一組三角函數(shù))
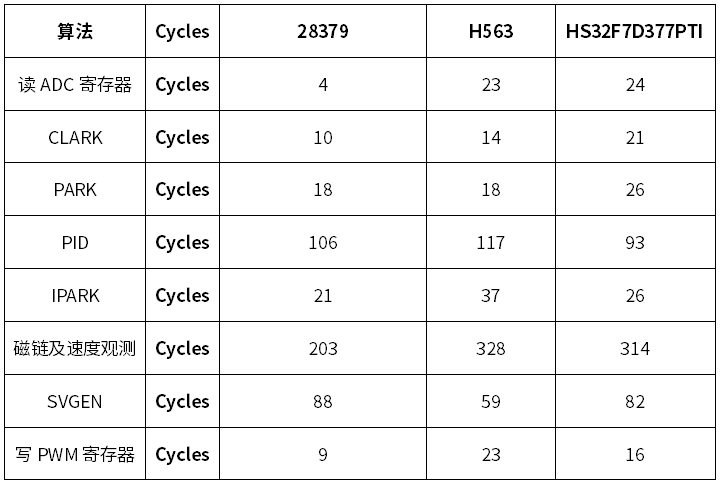
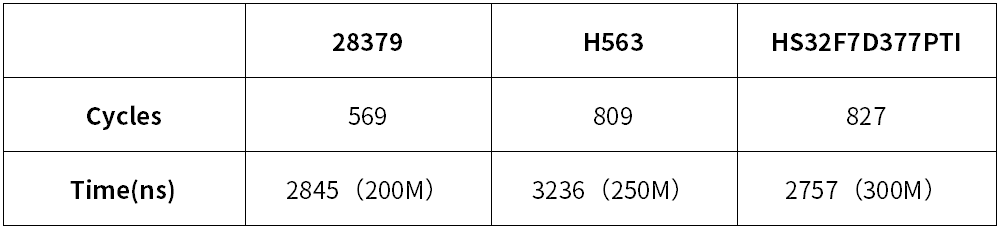
表4:電機控制算法執(zhí)行總時間(計算一組三角函數(shù))

8.1 三角函數(shù):軟件計算一組三角函數(shù),28379的計算周期數(shù)具有明顯優(yōu)勢,說明對應(yīng)的三角函數(shù)庫的執(zhí)行效率較高。另外28379的三角函數(shù)單元(Trigonometric Math Unit,TMU)和HS32F7D377PTI的超越函數(shù)計算單元( Transcendental Function Unit,TFU)能夠大幅提升三角函數(shù)的計算速度,但是由于H563沒有此功能,因此本文未做對比。
注:本次測試未對計算精度做對比。
8.2 ADC采樣及中斷響應(yīng)時間:在采集一個模擬量并觸發(fā)中斷的情況下,28379需要的周期數(shù)具有優(yōu)勢。但是眾所周知,ADC采樣需要一個合理的采樣時間,才能夠?qū)崿F(xiàn)準(zhǔn)確采樣,28379由于主頻低,所以相同的采樣周期數(shù)對應(yīng)更長的時間,而H563和HS32F7D377PTI的主頻更高,所以需要更多的周期數(shù)完成ADC采樣。三款MCU對應(yīng)的采樣時間分別為265ns、332ns和310ns,可以看到28379仍然具有一些優(yōu)勢,但是并不十分突出,符合上述分析。
8.3 電機控制算法執(zhí)行時間:通過測試數(shù)據(jù)可見,在讀寫寄存器方面,28379稍優(yōu),但是此項操作用時較少,整體影響不大。如前述分析,在三角函數(shù)計算方面,28379具有一定優(yōu)勢。在PID等數(shù)字計算及邏輯運算方面HS32F7D377PTI具有一定優(yōu)勢。但是由于HS32F7D377PTI在主頻方面具有明顯優(yōu)勢,因此最終在運行時間上優(yōu)于28379。
8.4 總時間:總時間從短到長依次為HS32F7D377PTI(2757ns)、28379(2845ns)、H563(3236ns),HS32F7D377PTI在此次IMC Benchmark測試中表現(xiàn)出了最優(yōu)的性能。

9.1 HS32F7D377PTI的特點:
使用ARM Cortex M7內(nèi)核,主頻300M,有主頻高的優(yōu)勢,算力強。
可以使用CMSIS三角函數(shù)庫,并且具有硬件加速單元TFU。
沒有控制率加速器(Control Law Accelerator,CLA),外設(shè)調(diào)度響應(yīng)時間稍遜于28379,但是外設(shè)響應(yīng)時間占總時間的比例較小。
9.2 28379的特點:
主頻200M相對于H563及HS32F7D377PTI劣勢,導(dǎo)致相近cycles情況下算力偏低。
軟件計算三角函數(shù)優(yōu)化效果好,并且具有硬件加速單元TMU,TMU與軟件計算相比優(yōu)勢明顯。
CLA可以調(diào)度外設(shè),執(zhí)行代碼,提高代碼整體運行速度(本次測試未應(yīng)用)。
9.3 H563特點:
使用ARM Cortex M33核,主頻250M,算力較強。
沒有三角函數(shù)硬件加速,可以使用CMSIS三角函數(shù)庫。
沒有CLA,外設(shè)調(diào)度響應(yīng)時間稍遜于28379,但是外設(shè)響應(yīng)時間占總時間的比例較小。
審核編輯:劉清
-
電機控制
+關(guān)注
關(guān)注
3567文章
1948瀏覽量
271312 -
寄存器
+關(guān)注
關(guān)注
31文章
5421瀏覽量
123350 -
PID控制
+關(guān)注
關(guān)注
10文章
461瀏覽量
41018 -
PWM波
+關(guān)注
關(guān)注
0文章
100瀏覽量
17256 -
ADC采樣
+關(guān)注
關(guān)注
0文章
134瀏覽量
13124
原文標(biāo)題:Copter E001系列MCU在感應(yīng)電機控制應(yīng)用中的實時基準(zhǔn)對比測試
文章出處:【微信號:華太電子,微信公眾號:華太電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
提升新能源市場核心競爭力,華太電子發(fā)布Copter E001實時控制MCU

感應(yīng)電機智能調(diào)速
特斯拉感應(yīng)電機的精妙之處
直線感應(yīng)電機與旋轉(zhuǎn)感應(yīng)電機的區(qū)別是什么
感應(yīng)電機基本結(jié)構(gòu)與理論分析

使用dsPIC30F MCU控制交流感應(yīng)電機
直線感應(yīng)電機的電磁分析
DSP的發(fā)展及DSP在感應(yīng)電動機矢量控制中的應(yīng)用資料說明





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論