") 自主移動(dòng)機(jī)器人的電源和電機(jī)控制解決方案
自主移動(dòng)機(jī)器人的電源和電機(jī)控制解決方案
和電機(jī)控制解決方案
自主移動(dòng)機(jī)器人(AMR)為不同領(lǐng)域和行業(yè)帶來(lái)了諸多優(yōu)勢(shì),包括提高了安全性和效率。然而,為了使AMR能夠安全、獨(dú)立地工作,這些復(fù)雜的系統(tǒng)需要精心集成多項(xiàng)技術(shù),像是電源和運(yùn)動(dòng)控制這兩個(gè)重要組件便至關(guān)重要。本文將為您介紹AMR的設(shè)計(jì)注意事項(xiàng),以及由安森美(onsemi)所提供的相應(yīng)解決方案。
AMR的電源與電機(jī)控制子系統(tǒng)
扮演關(guān)鍵角色
AMR具備和自動(dòng)駕駛汽車(chē)類(lèi)似的性能,是由一系列子系統(tǒng)構(gòu)成的復(fù)雜設(shè)計(jì),機(jī)器人能夠在盡可能少的人類(lèi)交互下,安全地移動(dòng)、觀測(cè)和運(yùn)行。要打造靈活而智能的AMR,電源和運(yùn)動(dòng)控制技術(shù)發(fā)揮的作用很關(guān)鍵。隨著時(shí)間推移,單個(gè)系統(tǒng)和組件的選擇可對(duì)這些先進(jìn)方案的性能與可靠性產(chǎn)生顯著影響。
首先,AMR中使用的電源系統(tǒng)和電源組件會(huì)對(duì)其總電池壽命和工作時(shí)長(zhǎng)產(chǎn)生重大影響。為AMR設(shè)計(jì)電源系統(tǒng)時(shí)需要考慮能量密度、電壓和電流要求、效率、方案尺寸等重要的性能特征和參數(shù)。
AMR通常使用鋰離子電池,因?yàn)榇祟?lèi)電池的能量密度高,使用時(shí)間長(zhǎng)。同時(shí),電源管理單元可調(diào)節(jié)從電池到其他組件的功率流。電壓和電流水平通過(guò)開(kāi)關(guān)轉(zhuǎn)換器和穩(wěn)壓器進(jìn)行控制。AMR中的電池管理系統(tǒng)可監(jiān)控電池的狀態(tài)、電量、溫度和電流,以確保AMR安全高效地運(yùn)行,而車(chē)載電池充電器的規(guī)格取決于電池類(lèi)型、容量和電壓。智能電源模塊為電機(jī)控制系統(tǒng)提供高功率開(kāi)關(guān),IPM中的功率開(kāi)關(guān)配有柵極驅(qū)動(dòng)器,用于提供相應(yīng)的信號(hào)來(lái)打開(kāi)和關(guān)閉開(kāi)關(guān),功率因數(shù)校正(PFC)控制器則可提升電源系統(tǒng)的總效率。
其次,在AMR中,電機(jī)驅(qū)動(dòng)型執(zhí)行器用于移動(dòng)機(jī)器手臂和輪子,因此其選擇至關(guān)重要。AMR需要采用效率高且緊湊輕便的高扭矩和高速執(zhí)行器。選擇執(zhí)行器時(shí),需要對(duì)無(wú)刷直流(BLDC)電機(jī)、電機(jī)控制器、MOSFET、通用控制器板(UCB)和柵極驅(qū)動(dòng)器等組件進(jìn)行評(píng)估。
與有刷電機(jī)相比,BLDC電機(jī)具有多個(gè)優(yōu)勢(shì)。BLDC電機(jī)的效率高、噪聲低且高度可靠,可以減少維護(hù)工作,因此被廣泛應(yīng)用于AMR中。然而,控制此類(lèi)電機(jī)需要復(fù)雜的算法和適當(dāng)?shù)?a target="_blank">驅(qū)動(dòng)器,其中的三相BLDC電機(jī)則廣泛用于機(jī)器人和工業(yè)驅(qū)動(dòng)器。
電機(jī)控制器的功能是精確控制AMR執(zhí)行器中的電機(jī)。這些器件可通過(guò)嵌入式控制算法來(lái)完全集成,也可使用運(yùn)行電機(jī)控制算法的專(zhuān)用微控制器單元(MCU)。AMR中常見(jiàn)的三相電機(jī)則是由功率晶體管使用脈寬調(diào)制(PWM)開(kāi)-關(guān)信號(hào)驅(qū)動(dòng)。這些開(kāi)關(guān)可由硅或?qū)捊麕Р牧现瞥桑热缣蓟瑁⊿iC)或氮化鎵(GaN)。
可靠的智能電源與電機(jī)控制解決方案
安森美提供了眾多可靠的智能電源、電機(jī)控制和傳感方案,最大程度簡(jiǎn)化了設(shè)計(jì)的復(fù)雜度,為客戶(hù)的設(shè)計(jì)提供堅(jiān)實(shí)的基礎(chǔ)。從強(qiáng)固、高分辨率的成像系統(tǒng),到高功率電機(jī)控制,再到高效率、緊湊型電池充電方案,這些子系統(tǒng)方案都是建立在安森美深耕汽車(chē)行業(yè)數(shù)十年的經(jīng)驗(yàn)技術(shù)之上。安森美的系列方案能夠簡(jiǎn)化開(kāi)發(fā)流程,并讓AMR即使身處最嚴(yán)苛的工作環(huán)境也能夠快速適應(yīng)、可靠運(yùn)行。
針對(duì)電源應(yīng)用方面,安森美推出多種PFC控制器非常適合AC-DC電源應(yīng)用,比如圖騰柱無(wú)橋PFC前端或基于LLC諧振拓?fù)涞腄C-DC級(jí)。它們還適用于高電壓DC-DC功率級(jí),可在AMR中實(shí)現(xiàn)高效率和高密度快速電池充電器設(shè)計(jì)。
在BLDC電機(jī)控制解決方案方面,安森美提供包括ECS640A ecoSpin電機(jī)控制器UCB、NCP81075柵極驅(qū)動(dòng)器,以及可用于加速AMR執(zhí)行器開(kāi)發(fā)的電源板。
UCB是基于Xilinx Zynq-7000 SoC的系統(tǒng)級(jí)模塊(SoM),非常適合精密應(yīng)用,也可用于先進(jìn)的人工智能(AI)。此外,安森美提供基于屏蔽柵極溝槽技術(shù)的MOSFET(30V至150V),并提供u8FL、SO8-FL、雙面冷卻和頂部冷卻等封裝選項(xiàng)。
基于T10技術(shù)的全新30-40V和80V MOSFET支持低壓與中壓應(yīng)用,T10器件分為兩大類(lèi)別,分別用于電源轉(zhuǎn)換和電機(jī)控制。用于電機(jī)控制的T10M器件提供出色的導(dǎo)通電阻,UIS能力提高10%,并具有優(yōu)異的體二極管軟恢復(fù)性能,可降低電壓尖峰并解決EMI問(wèn)題。
對(duì)于高功率應(yīng)用中的三相BLDC電機(jī),安森美推薦使用基于PTNG技術(shù)的MOSFET(80 V、100 V、120 V和150 V),而NTMTSC1D6N10MC、NTMTSC4D3N15MC、NTBLS1D5N10MC和NTBLS4D3N15MC MOSFET可滿足高性能應(yīng)用的要求。
高度集成的低功耗三相BLDC電機(jī)控制器
安森美推出的ECS640A是ecoSpin可配置電機(jī)控制器系列的最新成員,這是一款三相BLDC電機(jī)控制器,集成了超低功耗優(yōu)化的Arm Cortex-M0+微控制器、三個(gè)感應(yīng)放大器和一個(gè)參考放大器(NCS20034)、三個(gè)自舉二極管和一個(gè)專(zhuān)為高壓、高速運(yùn)行而設(shè)計(jì)的高壓柵極驅(qū)動(dòng)器,能夠驅(qū)動(dòng)工作電壓高達(dá)600V的MOSFET和IGBT(FAN73896)。
ECS640A的六個(gè)柵極驅(qū)動(dòng)器輸出為外部電源設(shè)備提供350 mA/650 mA(典型值)柵極電流的灌/拉電流。該器件包括霍爾傳感器輸入,支持有傳感器或無(wú)傳感器操作,三個(gè)獨(dú)立的低側(cè)源極引腳可實(shí)現(xiàn)單路或多路分流測(cè)量。ECS640A的保護(hù)功能包括欠壓鎖定和逆變器過(guò)流跳閘,并具有自動(dòng)故障清除功能,并提供開(kāi)漏故障信號(hào)來(lái)指示已發(fā)生故障情況。
ECS640A的直接扭矩和磁通控制(DTFC)固件現(xiàn)已推出,可在Arm Cortex-M0+平臺(tái)上實(shí)現(xiàn)最佳電機(jī)性能。客戶(hù)可直接從Theta Power Systems, Intl獲得DTFC代碼許可。ECS640A較小的占地面積和集成度,使該器件非常適合分立功率器件,以最大限度地提高跨平臺(tái)的可擴(kuò)展性,并隨著功率水平的擴(kuò)展而最大限度地減少面積要求。
ECS640A具有64kB閃存和8kB SRAM的Arm Cortex M0+嵌入式微控制器,支持600V FAN73896柵極驅(qū)動(dòng)器,以及NCS20034的7MHz、高轉(zhuǎn)換速率、軌到軌四路放大器,采用小尺寸SiP,并具有“易于使用”的用戶(hù)環(huán)境。
ECS640A常應(yīng)用于制冷壓縮機(jī)和鼓風(fēng)機(jī)、暖通空調(diào)(HVAC)鼓風(fēng)機(jī)和冷凝器、泳池水泵、工業(yè)驅(qū)動(dòng)器和泵與機(jī)器人技術(shù),常見(jiàn)的終端產(chǎn)品包括冰箱、瓶裝飲料冷藏柜、消費(fèi)類(lèi)空調(diào)機(jī)組、暖通空調(diào)鼓風(fēng)機(jī)、商用空調(diào)機(jī)組、白色家電與協(xié)作機(jī)器人等。
高性能的雙MOSFET柵極驅(qū)動(dòng)器
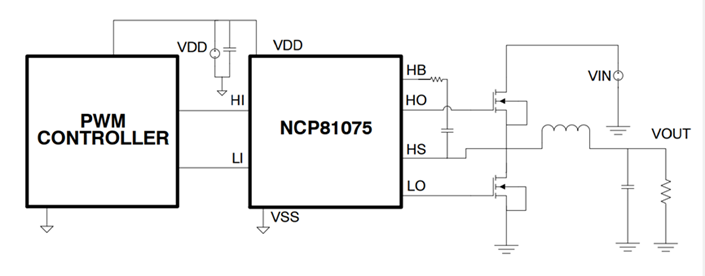
安森美推出的NCP81075是一款高性能雙MOSFET柵極驅(qū)動(dòng)器,經(jīng)過(guò)優(yōu)化可驅(qū)動(dòng)同步降壓轉(zhuǎn)換器中高壓側(cè)和低壓側(cè)功率MOSFET的柵極。NCP81075集成了一個(gè)驅(qū)動(dòng)器集成電路和一個(gè)自舉二極管,使用片上自舉二極管來(lái)消除外部分立二極管,驅(qū)動(dòng)能力高達(dá)4A,適用于驅(qū)動(dòng)在高達(dá)180 V電壓下運(yùn)行的高速、高電壓MOSFET,其高壓側(cè)和低壓側(cè)驅(qū)動(dòng)器可獨(dú)立控制,并且彼此匹配的導(dǎo)通和關(guān)斷時(shí)間間隔為4 ns,并帶有匹配的3.5 ns典型傳播延遲。
NCP81075可驅(qū)動(dòng)高壓側(cè)和低壓側(cè)的兩個(gè)N通道MOSFET,可用于高端柵極驅(qū)動(dòng)的集成自舉二極管,其自舉電源電壓范圍高達(dá)180V,開(kāi)關(guān)頻率高達(dá)1 MHz,具備4A拉電流、4A灌電流輸出能力,并可以8ns/7 ns的典型上升/下降時(shí)間驅(qū)動(dòng)1nF負(fù)載,支持8.5V至20V的寬電源電壓范圍,具有快速傳播延遲時(shí)間(典型值20 ns)與2 ns延遲匹配(典型值),工作結(jié)溫范圍為-40℃至140℃,支持驅(qū)動(dòng)電壓欠壓鎖定(UVLO)保護(hù)功能,當(dāng)驅(qū)動(dòng)電壓低于特定閾值時(shí),強(qiáng)制輸出為低電平。
NCP81075采用SOIC?8 (D)、DFN8 (MN)、WDFN10 (MT)封裝,這些器件不含鉛、不含鹵素/溴化阻燃劑(BFR),并且符合RoHS標(biāo)準(zhǔn),可廣泛應(yīng)用于電信和數(shù)據(jù)通信、高電壓降壓轉(zhuǎn)換器、隔離電源、D類(lèi)音頻放大器、雙開(kāi)關(guān)和有源鉗位正激轉(zhuǎn)換器,NCP81075還可用于太陽(yáng)能優(yōu)化器和太陽(yáng)能逆變器應(yīng)用。
結(jié)語(yǔ)
AMR在眾多產(chǎn)業(yè)中的應(yīng)用持續(xù)成長(zhǎng),然而,復(fù)雜的AMR系統(tǒng)需要集成多種不同的技術(shù)才能自主、可靠、安全地運(yùn)行。因此,AMR應(yīng)用能否成功,取決于設(shè)計(jì)時(shí)間是否選擇了合適的技術(shù)。安森美不僅可以提供電源與電機(jī)控制解決,還可提供各種傳感器(圖像、溫度、LiDAR、旋轉(zhuǎn)運(yùn)動(dòng)、可見(jiàn)光通信等),以及照明與通信等完整的產(chǎn)品解決方案,可確保AMR能夠充分發(fā)揮其潛能,將是工程師開(kāi)發(fā)AMR應(yīng)用的理想合作伙伴。
審核編輯:湯梓紅
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29446瀏覽量
211399 -
電機(jī)控制器
+關(guān)注
關(guān)注
21文章
555瀏覽量
32566 -
BLDC電機(jī)
+關(guān)注
關(guān)注
7文章
220瀏覽量
21899
原文標(biāo)題:【技術(shù)干貨】自主移動(dòng)機(jī)器人的電源和電機(jī)控制解決方案
文章出處:【微信號(hào):艾睿電子,微信公眾號(hào):艾睿電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
資料:移動(dòng)機(jī)器人能否自動(dòng)充電?
Labview My RIO 移動(dòng)機(jī)器人
機(jī)器人、協(xié)作機(jī)器人和移動(dòng)機(jī)器人,你分的清楚嗎
基于超聲波傳感器的自主移動(dòng)機(jī)器人探測(cè)系統(tǒng)
labview控制移動(dòng)機(jī)器人
基于LPC2119的自主式移動(dòng)機(jī)器人設(shè)計(jì)方案
家庭移動(dòng)機(jī)器人避障常用傳感器及相關(guān)技術(shù)
如何實(shí)現(xiàn)移動(dòng)機(jī)器人的設(shè)計(jì)?
什么是移動(dòng)機(jī)器人軟硬件系統(tǒng)問(wèn)題
差速移動(dòng)機(jī)器人軌跡跟蹤控制方法
【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(三) ——自主導(dǎo)航系統(tǒng)及上位機(jī)軟件設(shè)計(jì)與實(shí)現(xiàn)
基于Matlab和VR技術(shù)的移動(dòng)機(jī)器人建模及仿真
倉(cāng)庫(kù)和工業(yè)自主移動(dòng)機(jī)器人

DRC3000:商用移動(dòng)機(jī)器人整體解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論