") 受藤蔓啟發(fā)的具有自適應行為的軟體生長機器人FiloBot
受藤蔓啟發(fā)的具有自適應行為的軟體生長機器人FiloBot
在執(zhí)行探索非結構化環(huán)境等任務時,傳統(tǒng)機器人可能會被無法跨越的縫隙等障礙物所阻礙。這正是 FiloBot 的優(yōu)勢所在,因為它可以像自立藤蔓一樣生長。
FiloBot由意大利技術研究所(Istituto Italiano di Tecnologia)的科學家開發(fā),由埃馬努埃拉-德爾多托雷(Emanuela Del Dottore)領導的這項研究的論文最近發(fā)表在《科學機器人學》(Science Robotics)雜志上。您可以在下面的視頻中看到FiloBot的延時生長過程。
FiloBot能夠向著光源生長,遠離重力的牽引(當然也可以反過來),與攀援植物的卷須并無二致。FiloBot通過模仿攀爬植物的生長方式——通過在頂端增加材料來構建身體,實現(xiàn)在難以預測和復雜的環(huán)境中的導航。這種設計理念的核心在于能夠適應多種地形并克服障礙,特別適用于密集森林或雜亂區(qū)域這樣的非結構化環(huán)境。機器人使用添加制造技術(特別是熔融沉積建模,F(xiàn)DM)來創(chuàng)造其生長結構。 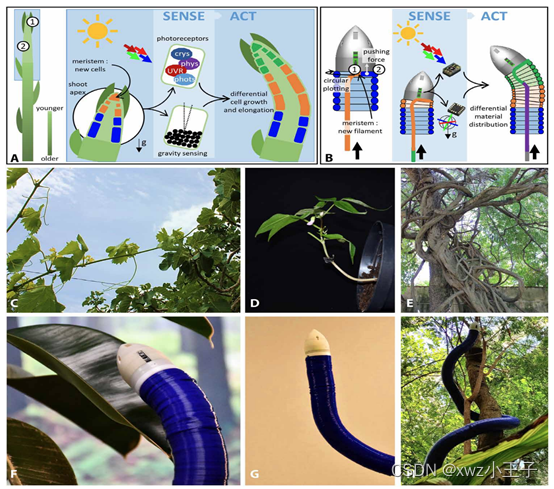 ?
?
該裝置的頂部是一個錐形頭,底部是一個電源/基站,中間是一個莖狀體。隨著機器人的生長,莖身會變得越來越長......但它是如何生長的呢?
FiloBot不斷從基站的線軸上將3D打印熱塑塑料絲拉到頭部。絲線穿過頭部的加熱擠出機,擠出機相對于機身緩慢旋轉。通過這種方式,機器人以連續(xù)盤繞的熔融塑料層為自己的身體進行3D打印,這些塑料層在冷卻后粘合在一起。
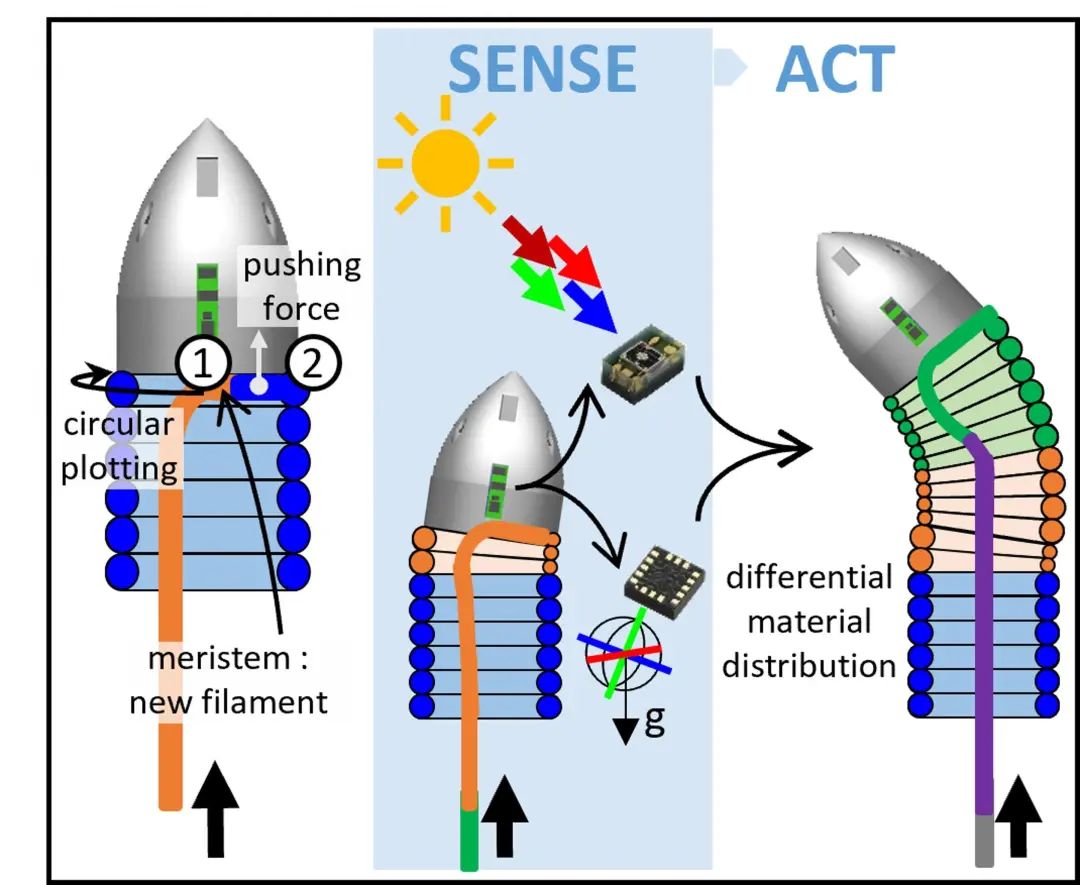
FiloBot 的頭部示意圖Del Dottore et al. 9, Eadi5908 (2024) 盡管如此,身體并不是以統(tǒng)一的方式打印出來的。通過光傳感器、陀螺儀和其他集成在頭部的電子設備,塑料的溫度、方向和沉積速度不斷變化。這樣,F(xiàn)iloBot 就能控制其身體的生長方向,始終朝著光的方向,遠離地面。
更重要的是,當有垂直支撐物時,機器人會自動繞過支撐物(就像藤蔓繞過棚架一樣),從而在不需要力量的時候,花費較少的時間和精力就能長出強壯的身體。然而,當沒有發(fā)現(xiàn)相鄰的支撐面時,換句話說,當頭部到達一個空曠的空間時,身體就會變硬且更為強壯,從而能夠支撐自己。
FiloBot在操作中顯示出了對多種環(huán)境刺激的適應性,包括光照和重力。FiloBot通過內(nèi)置的傳感器來捕捉環(huán)境中的光照和重力變化。這些傳感器包括加速度計和數(shù)字顏色傳感器,如VEML3328,用于感知光的強度和方向。機器人通過這些傳感器,能夠模仿植物的光向性和向地性行為。例如,它能夠根據(jù)光照強度和方向調(diào)整生長方向,類似于植物的向光性。同時,它也能根據(jù)重力方向調(diào)整其生長,模仿植物的向地性。 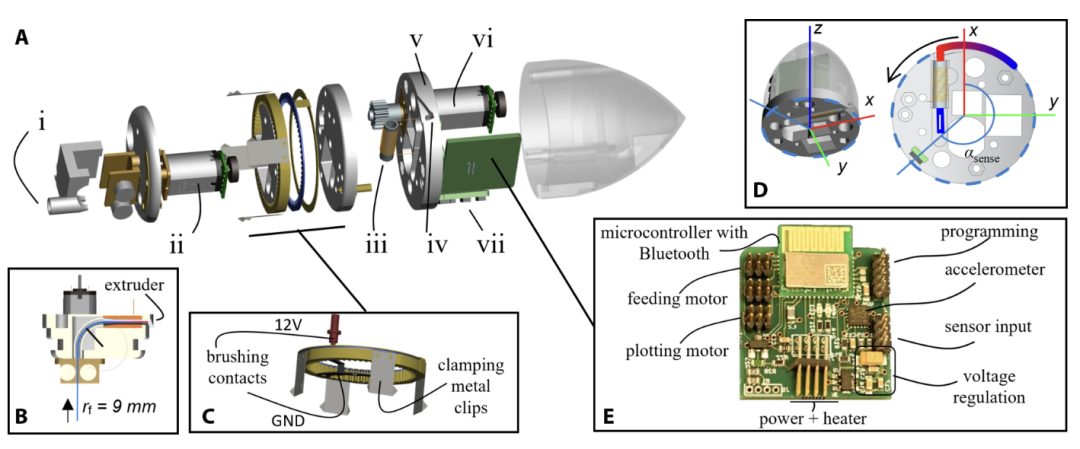
FiloBot的研究展示了軟體機器人技術在模仿自然界中生物的行為方面的巨大潛力,特別是在處理復雜和非結構化環(huán)境的導航問題上。這項研究不僅為軟體機器人技術的發(fā)展提供了新的思路,還為未來在極端或復雜環(huán)境中的探索和監(jiān)測提供了新的可能性。FiloBot通過其創(chuàng)新的設計和功能,展現(xiàn)了機器人技術與自然界生物功能相結合的未來方向。
審核編輯:劉清
-
傳感器
+關注
關注
2564文章
52609瀏覽量
763869 -
陀螺儀
+關注
關注
44文章
831瀏覽量
99693 -
光傳感器
+關注
關注
3文章
173瀏覽量
30328 -
軟體機器人
+關注
關注
1文章
113瀏覽量
11923
原文標題:Science Robotics: 受藤蔓啟發(fā)的具有自適應行為的軟體生長機器人FiloBot
文章出處:【微信號:robotmagazine,微信公眾號:機器人技術與應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
盤點#機器人開發(fā)平臺
六足仿生機器人地形自適應步態(tài)規(guī)劃研究
安泰高壓放大器在介電高彈聚合物驅動器和軟體機器人中的應用

清華大學:軟體機器人柔性傳感技術最新研究進展

《具身智能機器人系統(tǒng)》第10-13章閱讀心得之具身智能機器人計算挑戰(zhàn)
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
《具身智能機器人系統(tǒng)》第7-9章閱讀心得之具身智能機器人與大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎模塊
高壓放大器在水下?lián)湟?b class='flag-5'>軟體機器人研究中的應用


機器人技術的發(fā)展趨勢
清華大學:軟體機器人柔性傳感技術最新研究進展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論