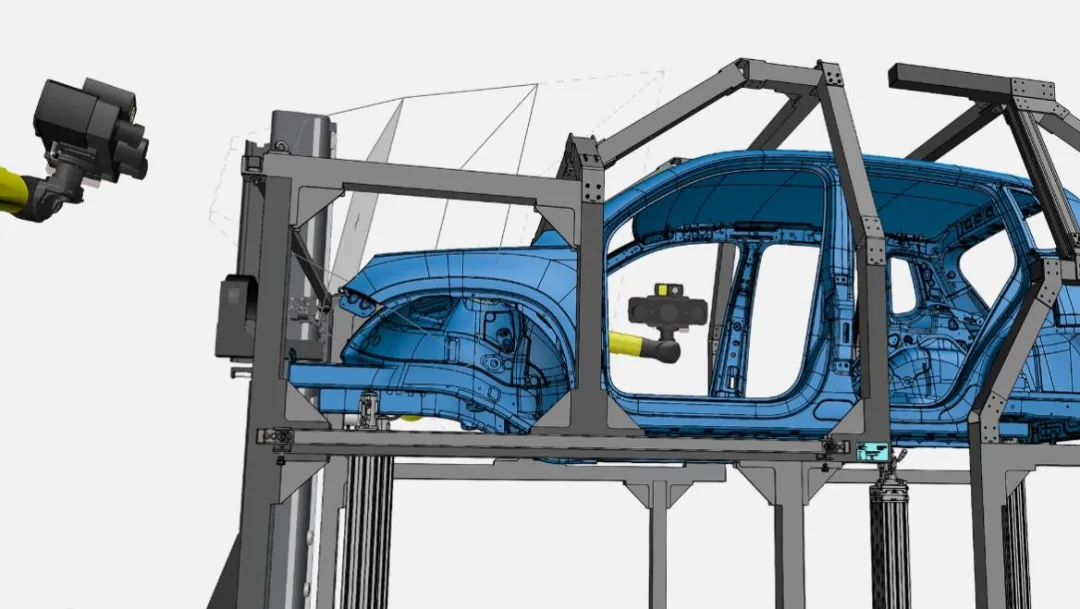
") 3D AR進(jìn)入汽車,將開啟汽車科技新紀(jì)元
3D AR進(jìn)入汽車,將開啟汽車科技新紀(jì)元
在擋風(fēng)玻璃上顯示圖形信息給司機(jī)并不是什么新鮮事。但這種“抬頭”設(shè)備往往只能在2D和小范圍內(nèi)運(yùn)行。這意味著人們需要經(jīng)常在顯示器和前方道路之間切換注意力。
最近,英國(guó)研究人員認(rèn)為司機(jī)在保持注意力集中的情況下,應(yīng)該有可能識(shí)別出他們面前隱藏的障礙物。研究人員將光探測(cè)和測(cè)距(激光雷達(dá))與計(jì)算機(jī)生成的全息術(shù)相結(jié)合,展示了如何將這些物體的3D重現(xiàn)放置在司機(jī)視野中,并具有正確的外觀尺寸——所有這些都是實(shí)時(shí)的。
追求無干擾的AR
這種顯示器是所謂的增強(qiáng)現(xiàn)實(shí)(AR)的例子。AR技術(shù)不是讓用戶沉浸在一個(gè)完全人工的、由計(jì)算機(jī)生成的世界中,而是用額外的數(shù)據(jù)補(bǔ)充來自現(xiàn)實(shí)世界的感官輸入。這種方法已經(jīng)廣泛應(yīng)用于從教育到外科手術(shù)的各個(gè)領(lǐng)域。但在駕駛場(chǎng)景下,它有可能會(huì)讓用戶分散注意力。
為了解決這個(gè)問題,一些研究小組試圖開發(fā)3D平視系統(tǒng),其中一些依賴于全息技術(shù)。傳統(tǒng)的全息圖是通過物理方法用參考光束干擾物體光束來創(chuàng)建的,而AR中使用的全息圖則是通過計(jì)算生成的,它從現(xiàn)實(shí)世界的物體上反射光或其他波,然后計(jì)算它們與參考光束結(jié)合時(shí)產(chǎn)生的干涉圖案。關(guān)鍵在于能夠快速準(zhǔn)確地進(jìn)行計(jì)算,從而捕捉到移動(dòng)車輛周圍不斷變化的環(huán)境。
激光雷達(dá)全息圖
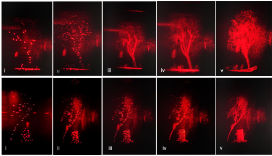
在最新的研究中,劍橋大學(xué)的Jana Skirnewskaja和其同事,以及牛津大學(xué)和英國(guó)倫敦大學(xué)學(xué)院的同僚,展示了如何通過激光雷達(dá)(通過反射激光來測(cè)量物體的距離)來創(chuàng)建這種全息圖。利用精心挑選的激光雷達(dá)點(diǎn)云數(shù)據(jù),研究人員發(fā)現(xiàn),即使在單次激光掃描中收集的數(shù)據(jù)相對(duì)較少,他們也可以重建物體的360度視圖。
Skirnewskaja解釋道,每個(gè)點(diǎn)都有自己的空間坐標(biāo)和強(qiáng)度等級(jí)。給定足夠的點(diǎn),即使物體對(duì)移動(dòng)的車輛只有部分可見,也可以在3D中重建物體。
研究人員使用地面激光雷達(dá)掃描儀記錄了一些物體的點(diǎn)云數(shù)據(jù):包括一棵樹、一輛卡車和站在自行車旁邊的行人沿著Malet街(倫敦大學(xué)學(xué)院附近的一條路),然后分兩步制作全息圖。首先,計(jì)算了虛平面內(nèi)各點(diǎn)發(fā)出的光波的疊加;然后,利用衍射的物理原理,從虛平面推導(dǎo)出全息平面。
重構(gòu)場(chǎng)景
為了從全息圖中重建觀察到的場(chǎng)景,Skirnewskaja和他的同事們用氦氖激光照射液晶顯示器,使晶體的雙折射分子按照全息圖干涉圖案決定電場(chǎng)的特定排列排列開來。他們能夠利用“虛擬菲涅耳透鏡”將重建的物體放置在駕駛員視野內(nèi)的正確距離上,從而節(jié)省車內(nèi)空間。
研究人員使用大小從10點(diǎn)到40萬(wàn)點(diǎn)不等的點(diǎn)云來記錄全息圖,使用標(biāo)準(zhǔn)的計(jì)算機(jī)CPU和更強(qiáng)大的GPU來處理數(shù)據(jù)。他們發(fā)現(xiàn),GPU的并行處理能力能夠在相對(duì)較少的額外時(shí)間內(nèi)產(chǎn)生更高質(zhì)量的全息圖像(處理100個(gè)點(diǎn)需要12秒,而處理1000個(gè)點(diǎn)只需要26秒)。
先快速瀏覽,然后提供更多信息
考慮到移動(dòng)車輛對(duì)速度的需求,該團(tuán)隊(duì)建議,駕駛員可以首先使用只有25個(gè)點(diǎn)的激光雷達(dá),在大約5秒后創(chuàng)建一個(gè)物體的輪廓,從而警告潛在的重要隱藏物體的存在。21秒后,一個(gè)1000點(diǎn)的全息圖就可以創(chuàng)建出來,產(chǎn)生360°的物體視圖,讓司機(jī)進(jìn)一步確定(如給定的卡車有多長(zhǎng)等具體信息)。
Skirnewskaja表示,從進(jìn)行測(cè)試以來,她和同事們已經(jīng)改進(jìn)了這項(xiàng)技術(shù),展示了如何用紅綠藍(lán)光纖激光器將隱藏障礙物投射成全彩。她解釋道,他們的計(jì)劃是2024年在一輛真正的汽車上測(cè)試一個(gè)顯示器,并與谷歌合作,為不同視力狀況的人量身定制這個(gè)系統(tǒng)。但她補(bǔ)充說,在顯示器真正用于道路使用之前,還需要進(jìn)一步改進(jìn),包括將激光雷達(dá)掃描儀與攝像頭結(jié)合起來,以識(shí)別路標(biāo)上的文字,并重建物體的輪廓。
審核編輯:黃飛
-
顯示器
+關(guān)注
關(guān)注
21文章
5065瀏覽量
141379 -
Ar
+關(guān)注
關(guān)注
25文章
5143瀏覽量
172020 -
增強(qiáng)現(xiàn)實(shí)
+關(guān)注
關(guān)注
1文章
722瀏覽量
45371
原文標(biāo)題:3D AR即將進(jìn)入汽車!
文章出處:【微信號(hào):SSDFans,微信公眾號(hào):SSDFans】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
泰芯半導(dǎo)體開啟AIOT高效傳輸新紀(jì)元
福田歐航智藍(lán)EHL開啟城市環(huán)衛(wèi)新紀(jì)元
蔡司軟件 | ZEISS INSPECT Optical 3D在汽車行業(yè)的應(yīng)用
深藍(lán)汽車攜手華為開創(chuàng)全民智駕新紀(jì)元
中國(guó)信通院栗蔚:云計(jì)算與AI加速融合,如何開啟智算時(shí)代新紀(jì)元?

開源項(xiàng)目!3D打印的遠(yuǎn)程控制雙速全驅(qū)汽車
解決方案 3D 視覺機(jī)器人賦能汽車制造新征程

3D 視覺定位技術(shù):汽車零部件制造的智能變革引擎
顯示體驗(yàn)升級(jí):2.5D GPU技術(shù)逐漸成為標(biāo)配,3D GPU加碼可穿戴
智慧光伏:開啟電站運(yùn)維新紀(jì)元

3D打印汽車零部件模型定制服務(wù),多種材料、快速打印-CASAIM

模塊化點(diǎn)焊電源技術(shù):開啟高效、靈活的焊接新紀(jì)元

3D激光線掃輪廓傳感器在汽車行業(yè)的汽車車縫檢測(cè)的應(yīng)用
3D打印汽車零部件建模設(shè)計(jì)3D打印服務(wù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論