") 容錯(cuò)can和高速can的區(qū)別
容錯(cuò)can和高速can的區(qū)別
容錯(cuò)CAN(Controller Area Network)和高速CAN是兩種常見的汽車通信協(xié)議,它們?cè)谒俣群涂煽啃苑矫嬗兴煌R韵率顷P(guān)于容錯(cuò)CAN和高速CAN的詳盡、詳實(shí)和細(xì)致的1500字文章。
第一部分:容錯(cuò)CAN介紹
容錯(cuò)CAN是一種使用于汽車領(lǐng)域的通信協(xié)議,它是由Bosch公司于1986年首次推出的。容錯(cuò)CAN被廣泛用于各種車輛系統(tǒng),如發(fā)動(dòng)機(jī)管理、制動(dòng)系統(tǒng)、儀表盤和車身控制等。容錯(cuò)CAN主要用于向車輛各個(gè)子系統(tǒng)傳輸信息和指令,以實(shí)現(xiàn)車輛內(nèi)部各部件的通信和協(xié)調(diào)。
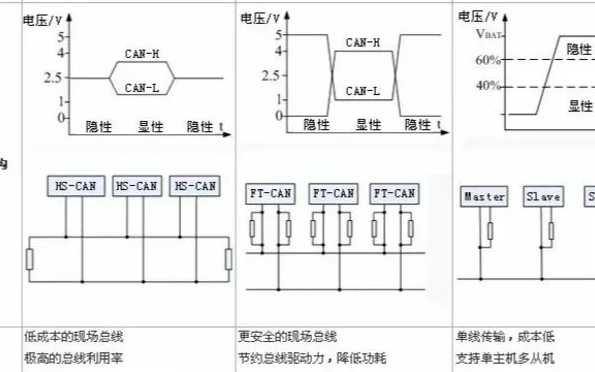
容錯(cuò)CAN的主要特點(diǎn)是其高度可靠的數(shù)據(jù)傳輸。它采用了差分信號(hào)線來傳輸數(shù)據(jù),這種差分信號(hào)線能夠在一些干擾的情況下依然保持通信的可靠性。此外,容錯(cuò)CAN還采用了一種錯(cuò)誤檢測(cè)和糾正機(jī)制,可以在數(shù)據(jù)傳輸過程中檢測(cè)和更正可能出現(xiàn)的錯(cuò)誤,從而提高數(shù)據(jù)的正確性和完整性。
容錯(cuò)CAN的通信速度較低,一般為100kbps。這是因?yàn)槿蒎e(cuò)CAN主要用于傳輸一些非實(shí)時(shí)性的信息,如車輛狀態(tài)和控制指令等,對(duì)通信速度的要求相對(duì)較低。同時(shí),較低的通信速度還有助于減小干擾對(duì)通信造成的影響,提高通信的可靠性和穩(wěn)定性。
第二部分:高速CAN介紹
高速CAN是容錯(cuò)CAN的一種改進(jìn)版,它在通信速度和實(shí)時(shí)性方面有所提升。高速CAN增加了通信速度,一般為500kbps或更高。這使得高速CAN適用于傳輸一些需要較快響應(yīng)的實(shí)時(shí)信息,如車輛動(dòng)態(tài)數(shù)據(jù)和傳感器數(shù)據(jù)等。高速CAN可以更快地傳輸數(shù)據(jù),從而提高系統(tǒng)的響應(yīng)速度和效率。
高速CAN在數(shù)據(jù)傳輸?shù)目煽啃苑矫娌捎昧艘恍└倪M(jìn)措施。它增加了一些錯(cuò)誤檢測(cè)和糾正機(jī)制,可以在數(shù)據(jù)傳輸過程中更好地檢測(cè)和糾正錯(cuò)誤。與容錯(cuò)CAN相比,高速CAN在數(shù)據(jù)傳輸?shù)目煽啃苑矫娓鼜?qiáng)大,可以更好地抵抗一些干擾和噪聲。
另外,高速CAN還增加了一些功能,如具有更高的帶寬和具備多主控制器的能力。這使得高速CAN能夠同時(shí)傳輸更多的數(shù)據(jù),并支持多個(gè)ECU(Electronic Control Unit)同時(shí)對(duì)總線進(jìn)行控制。
第三部分:容錯(cuò)CAN與高速CAN的區(qū)別
容錯(cuò)CAN和高速CAN在速度和可靠性方面有所不同。容錯(cuò)CAN傳輸?shù)乃俾瘦^低,一般為100kbps,而高速CAN傳輸?shù)乃俾瘦^高,一般為500kbps或更高。容錯(cuò)CAN主要用于傳輸一些非實(shí)時(shí)性的信息,對(duì)通信速度的要求相對(duì)較低;而高速CAN適用于傳輸需要較快響應(yīng)的實(shí)時(shí)信息。
容錯(cuò)CAN和高速CAN在數(shù)據(jù)傳輸?shù)目煽啃苑矫嬉灿兴煌H蒎e(cuò)CAN采用了差分信號(hào)線和錯(cuò)誤檢測(cè)和糾正機(jī)制,可以在一些干擾的情況下保持通信的可靠性。而高速CAN在可靠性方面更強(qiáng)大,增加了一些錯(cuò)誤檢測(cè)和糾正機(jī)制,可以更好地抵抗干擾和噪聲。
此外,高速CAN在功能上也有一些提升。它具備更高的帶寬,可以同時(shí)傳輸更多的數(shù)據(jù)。同時(shí),高速CAN還具備多主控制器的能力,支持多個(gè)ECU同時(shí)對(duì)總線進(jìn)行控制,提高系統(tǒng)的靈活性和可擴(kuò)展性。
結(jié)論:
容錯(cuò)CAN和高速CAN是兩種常見的汽車通信協(xié)議,在速度和可靠性方面有所不同。
容錯(cuò)CAN主要用于傳輸一些非實(shí)時(shí)性的信息,速率較低,一般為100kbps。它采用了差分信號(hào)線和錯(cuò)誤檢測(cè)和糾正機(jī)制,可以在一些干擾的情況下保持通信的可靠性。容錯(cuò)CAN的設(shè)計(jì)目標(biāo)是提供高度可靠的數(shù)據(jù)傳輸。
高速CAN適用于傳輸需要較快響應(yīng)的實(shí)時(shí)信息,速率較高,一般為500kbps或更高。它增加了一些錯(cuò)誤檢測(cè)和糾正機(jī)制,可以更好地抵抗干擾和噪聲。高速CAN還具備更高的帶寬和多主控制器的能力,支持同時(shí)傳輸更多的數(shù)據(jù)和多個(gè)ECU對(duì)總線的控制。
容錯(cuò)CAN和高速CAN在汽車通信系統(tǒng)中起著不同的作用,選擇適合的通信協(xié)議取決于具體應(yīng)用的需求。無論是容錯(cuò)CAN還是高速CAN,都是為了確保車輛內(nèi)部各個(gè)子系統(tǒng)之間的信息傳輸和協(xié)調(diào)效果,提高整體系統(tǒng)的性能和可靠性。
-
通信協(xié)議
+關(guān)注
關(guān)注
28文章
995瀏覽量
40921 -
數(shù)據(jù)傳輸
+關(guān)注
關(guān)注
9文章
2002瀏覽量
65634 -
CAN
+關(guān)注
關(guān)注
57文章
2882瀏覽量
466657 -
差分信號(hào)線
+關(guān)注
關(guān)注
0文章
11瀏覽量
2044
發(fā)布評(píng)論請(qǐng)先 登錄
高速與容錯(cuò)CAN在數(shù)據(jù)鏈路層內(nèi)容及性能
高速CAN總線和低速CAN總線的特性

求助:容錯(cuò)CAN驅(qū)動(dòng)及收發(fā)程序編寫
低速容錯(cuò)CAN協(xié)議接入單元及應(yīng)用
高速CAN、容錯(cuò)CAN、LIN總線的區(qū)別是什么
低速CAN和高速CAN都有哪些區(qū)別呢
高速CAN總線和低速CAN總線區(qū)別分析
使用 CAN 低速容錯(cuò)的設(shè)計(jì)注意事項(xiàng)

低速容錯(cuò)CAN的容錯(cuò)機(jī)制介紹

科普系列:低速容錯(cuò)CAN的容錯(cuò)機(jī)制介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論