 NeRF何去何從?GS SLAM到底哪家強?來看看最新的開源方案!
NeRF何去何從?GS SLAM到底哪家強?來看看最新的開源方案!

0. 筆者個人體會
最近3D GS已經徹底殺入了SLAM領域,光這一個月看見了好幾篇GS SLAM的工作。例如上海AI Lab的GS-SLAM、帝國理工戴森機器人實驗室的Gaussian Splatting SLAM、CMU的SplaTAM。
今天筆者將為大家再分享一篇GS SLAM的最新開源工作Gaussian-SLAM,同樣實現了照片級渲染的實時SLAM。不過大家都說自己是第一個GS SLAM,但具體哪個SLAM更強,讀者可以運行代碼對比一下~
下面一起來閱讀一下這項工作,文末附論文和代碼鏈接~
1. 效果展示
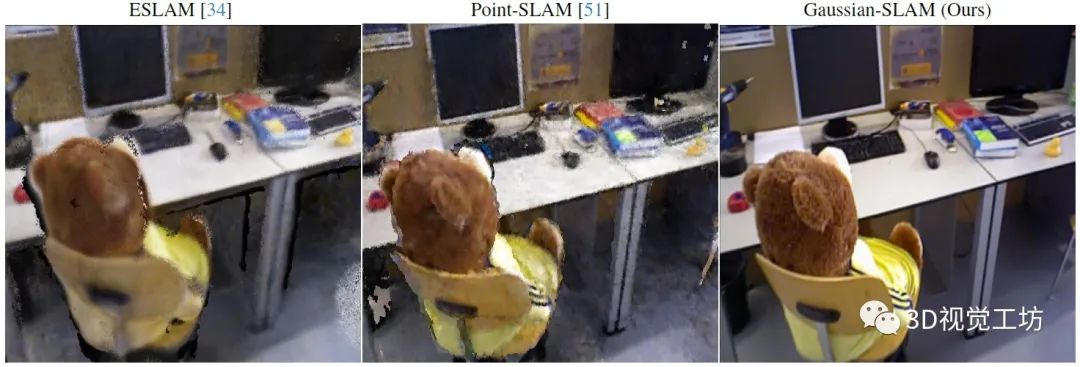
Gaussian-SLAM的渲染結果對比,Gaussian Splatting本身非常快,所以可以只看一下渲染精度。對比其他NeRF SLAM精度有明顯提升,但是沒有對比其他GS SLAM。
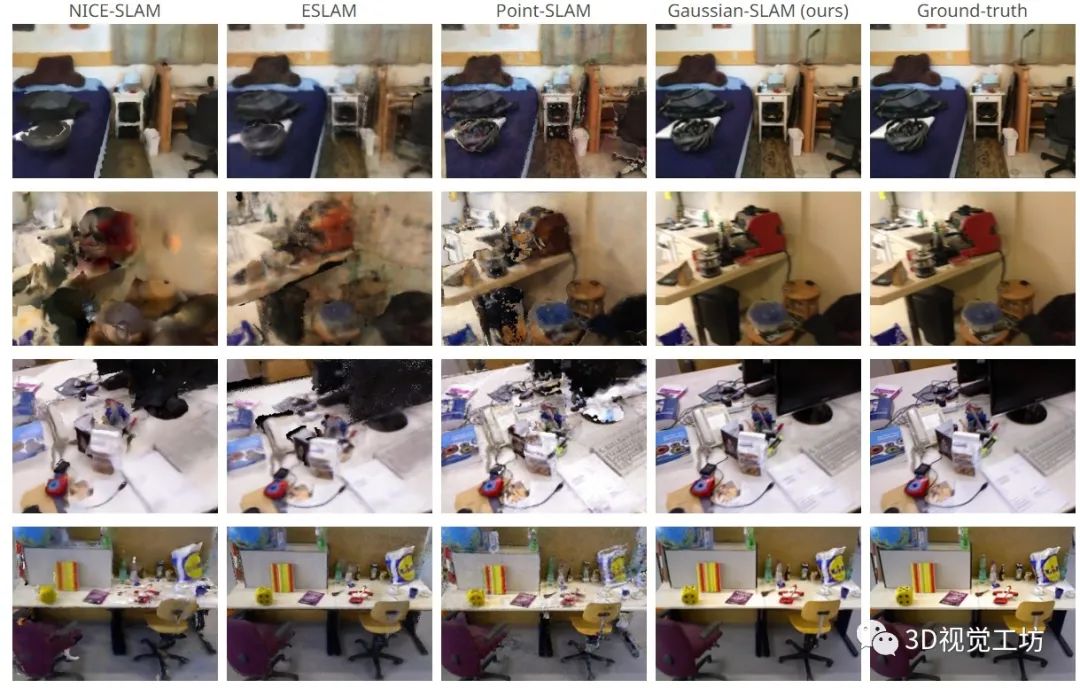
更多渲染結果的對比,但還是挺想看看和Gaussian Splatting SLAM等工作的對比效果的。
2. 具體原理是什么?
Gaussian-SLAM提出了用于seeding和優化Gaussian splats的新策略,以將其從多視圖離線場景擴展到RGBD序列。還擴展了Gaussian splats來編碼幾何圖形并嘗試跟蹤場景表示。這里也推薦工坊推出的新課程《徹底剖析室內、室外激光SLAM關鍵算法和實戰(cartographer+LOAM+LIO-SAM)》。
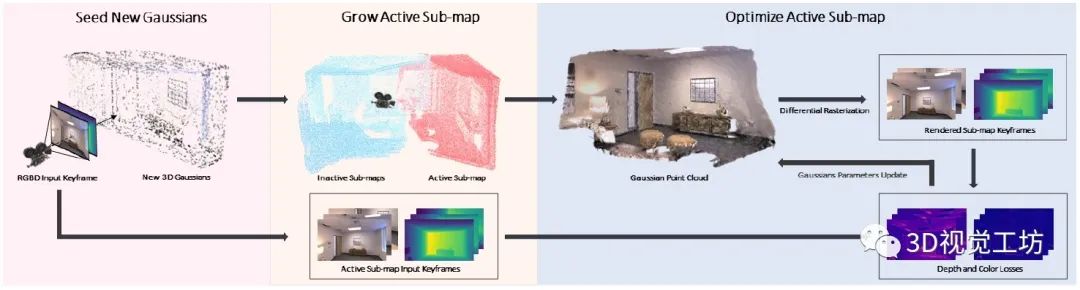
當輸入RGBD關鍵幀時,考慮到顏色梯度,首先對其進行下采樣。然后將采樣點投影到3D空間,在這些采樣位置上用它們的均值初始化新的高斯。這些新的3D高斯被添加到稀疏區域的全局地圖的當前活動段中。輸入的RGBD關鍵幀與其他對活動子圖有貢獻的關鍵幀一起臨時存儲。一旦新的高斯被整合到活動子圖中,所有對活動子圖有貢獻的關鍵幀都被渲染出來。隨后,對子圖輸入的關鍵幀計算深度和顏色損失。接著更新活動子圖中3D高斯的參數。這個過程重復固定的迭代次數。
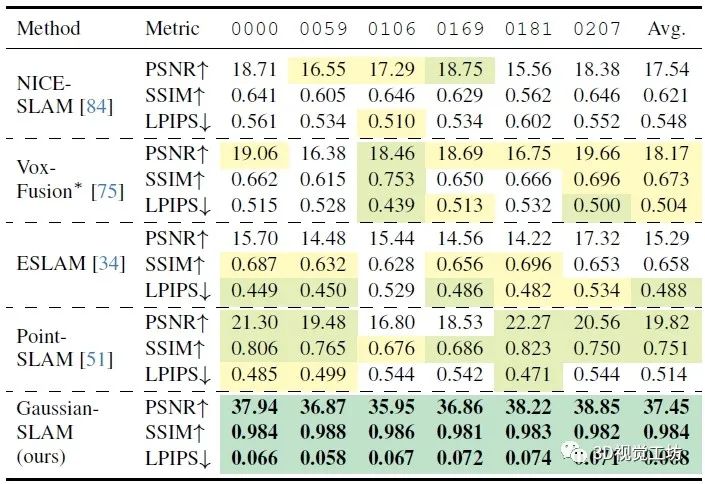
3. 和其他SOTA方法對比如何?
ScanNet數據集上的渲染效果對比,相比NeRF SLAM有了明顯提升,但同時是沒有對比其他GS SLAM。
對更多實驗結果和文章細節感興趣的讀者,可以閱讀一下論文原文~
-
3D
+關注
關注
9文章
2961瀏覽量
110952 -
開源
+關注
關注
3文章
3749瀏覽量
43943 -
SLAM
+關注
關注
24文章
444瀏覽量
32545
原文標題:NeRF何去何從?GS SLAM到底哪家強?來看看最新的開源方案!
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
云計算技術哪家強?亞馬遜與微軟對決
怎么沒有STC或51單片機專門的版塊了?
讓機器人完美建圖的SLAM 3.0到底是何方神圣?
3C認證哪家強?找安磁檢測準沒錯!
智能鎖哪家強?先來看看TI方案

視覺SLAM開源方案匯總 視覺SLAM設備選型

3D重建的SLAM方案算法解析

基于NeRF/Gaussian的全新SLAM算法






 工商網監
工商網監
評論