") 計(jì)算機(jī)視覺(jué)、計(jì)算機(jī)圖像學(xué)和圖像處理詳解
計(jì)算機(jī)視覺(jué)、計(jì)算機(jī)圖像學(xué)和圖像處理詳解
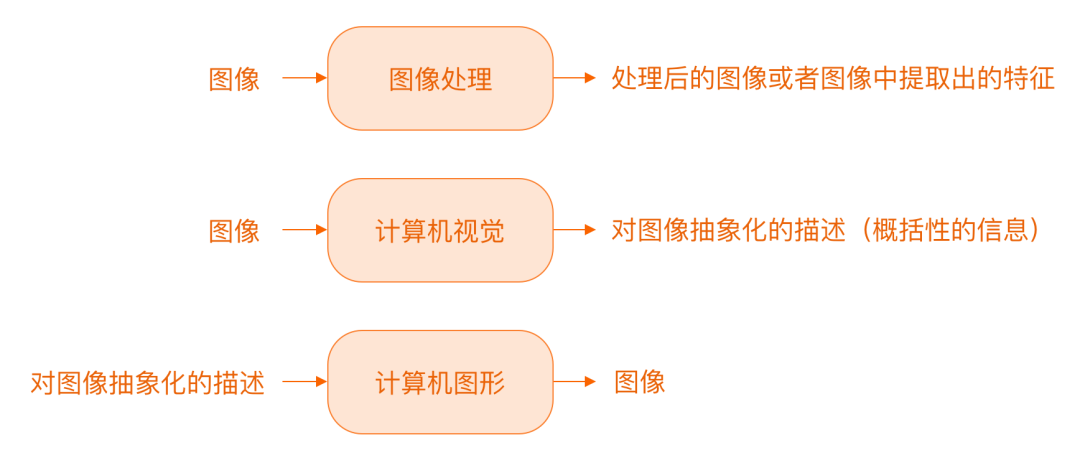
計(jì)算機(jī)視覺(jué):Computer Vision
一門(mén)讓計(jì)算機(jī)從圖像中提取有用信息并加以分析的科學(xué)。這些信息后續(xù)可以用于輔助一些決策或者任務(wù),比如醫(yī)學(xué)圖像分析、工程測(cè)量、自動(dòng)駕駛、機(jī)器人學(xué)等等。
計(jì)算機(jī)圖像學(xué):Computer Graphics
通過(guò)使用數(shù)學(xué)模型和計(jì)算機(jī)算法來(lái)生成圖像。
圖像處理:Image Process
圖像數(shù)字化:
空間采樣、量化、與連通性策略是將圖像做數(shù)字化表達(dá)過(guò)程中涉及到的重要概念。
量化:將每個(gè)像素點(diǎn)在色彩通道內(nèi)的亮度按照區(qū)間從連續(xù)分布轉(zhuǎn)化為離散分布的過(guò)程。
四連通與八連通:像素點(diǎn)計(jì)算領(lǐng)域的劃分標(biāo)準(zhǔn)。
四連通:像素四條邊相連的區(qū)域
八連通:比四連通多四個(gè)角。
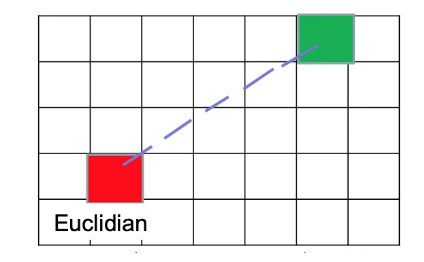
距離:
歐式距離 (Euclidean) - 兩點(diǎn)之間的直線距離
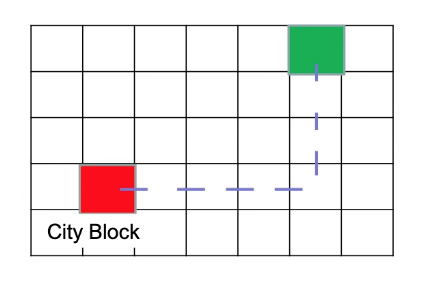
曼哈頓距離 (City Block) - 沿著方格線行走的兩點(diǎn)間距(即僅水平和豎直四個(gè)方向移動(dòng))
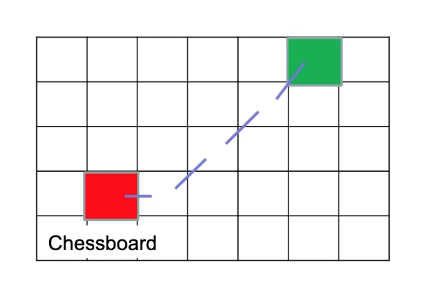
切比雪夫距離距離 (Chess Board) - 沿著方格線及對(duì)角行走的兩點(diǎn)間距(即水平、豎直、以及對(duì)角八個(gè)方向移動(dòng))
一張圖片中往往有前景(foreground)和背景(background):
確定前景和背景的連通性策略,通常有:
背景四連通、前景八連通
背景八連通、前景四連通
一般有遞歸算法、順序標(biāo)記法。
遞歸算法消耗性能大:遍歷圖像中所有的像素點(diǎn),遇到未標(biāo)記區(qū)域編號(hào)的點(diǎn)即遞歸用當(dāng)前的區(qū)域編號(hào)標(biāo)記與之相連的所有像素點(diǎn)。
順序標(biāo)記法:運(yùn)用與像素區(qū)域連通性問(wèn)題
圖像數(shù)據(jù)的收集和處理:
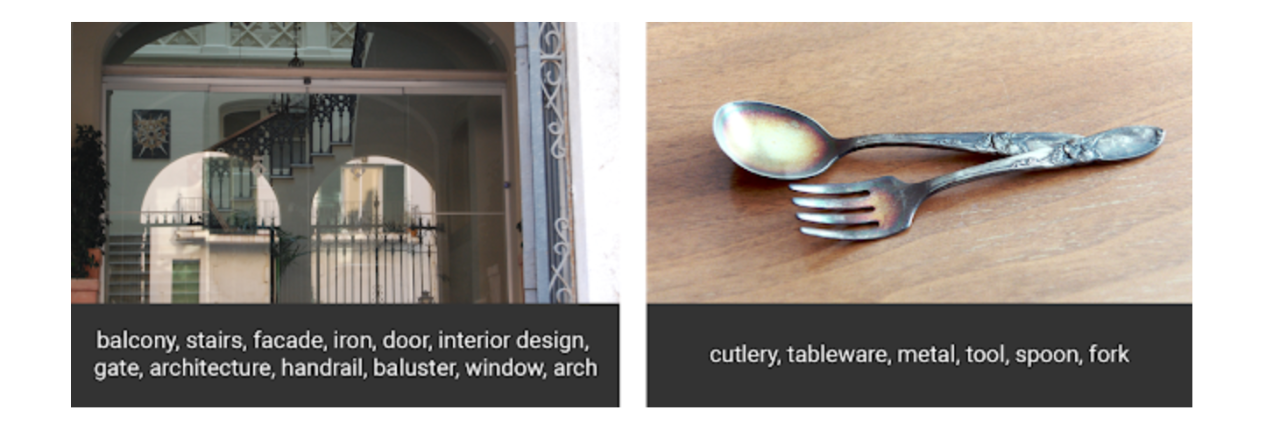
借助語(yǔ)義化分割對(duì) UI 圖像進(jìn)行處理,得到輪廓、結(jié)構(gòu)、上下文等特征。
借助超級(jí)像素的方法來(lái)降低特征的數(shù)量,合并像素達(dá)到降低干擾因素的效果。
采用 OpenCV 進(jìn)行測(cè)量、計(jì)算,然后用規(guī)則嘗試提取有用的特征數(shù)據(jù),結(jié)果并不理想,它更加擅長(zhǎng)測(cè)量和計(jì)算:需要大量的閾值約束才能達(dá)到比較好的效果:
用機(jī)器視覺(jué)的模型和算法來(lái)解決。這邊介紹 2 個(gè)模型:
MaskRCNN
2017年,Kaiming He等人提出了Mask R-CNN,是一種目標(biāo)檢測(cè)和實(shí)例分割的算法
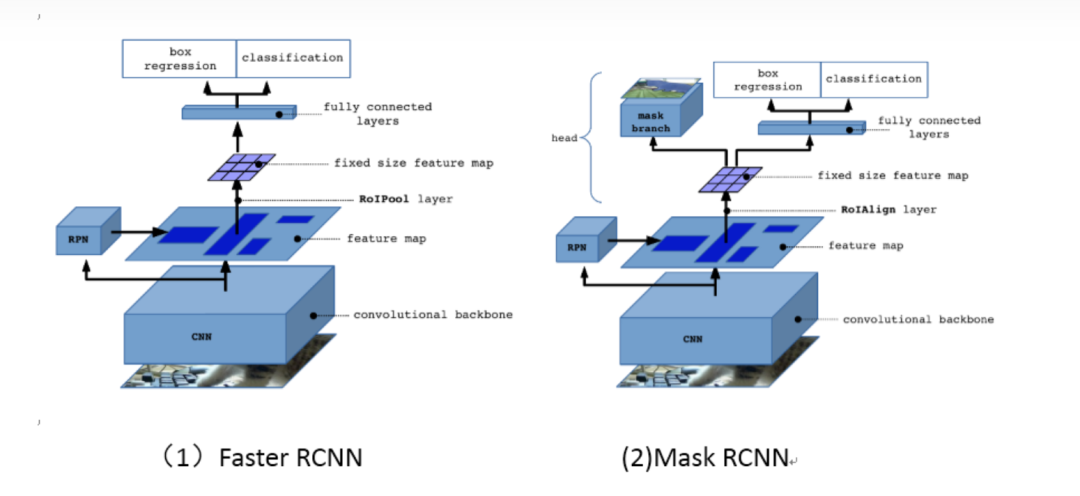
Mask R-CNN(Mask Region-based Convolutional Neural Network)是一種用于目標(biāo)檢測(cè)和實(shí)例分割的深度學(xué)習(xí)模型,它是 Faster R-CNN 的擴(kuò)展,同時(shí)可以生成目標(biāo)的二進(jìn)制掩碼(mask),因此可以實(shí)現(xiàn)精確的實(shí)例分割。
1、骨干網(wǎng)絡(luò):Mask R-CNN通常使用骨干網(wǎng)絡(luò)(如 ResNet)來(lái)提取圖像特征。這些特征用于目標(biāo)檢測(cè)和分割任務(wù)。
2、區(qū)域建議網(wǎng)絡(luò)(RPN):RPN 用于生成候選區(qū)域,它是 Faster R-CNN 中的組件,用于確定可能包含目標(biāo)的圖像區(qū)域。
3、目標(biāo)檢測(cè):Mask R-CNN 使用區(qū)域建議來(lái)檢測(cè)圖像中的目標(biāo)對(duì)象,通常通過(guò)分類(lèi)和回歸來(lái)確定每個(gè)目標(biāo)的位置和類(lèi)別。
4、實(shí)例分割:除了目標(biāo)檢測(cè),Mask R-CNN 還生成每個(gè)檢測(cè)到的目標(biāo)的精確二進(jìn)制掩碼。這允許對(duì)目標(biāo)進(jìn)行精確的像素級(jí)分割。
5、多任務(wù)學(xué)習(xí):Mask R-CNN 采用多任務(wù)學(xué)習(xí)的方法,通過(guò)同時(shí)訓(xùn)練目標(biāo)檢測(cè)和實(shí)例分割任務(wù),從而提高模型的性能。
6、ROI Pooling / ROI Align:用于從特征圖中提取每個(gè)候選區(qū)域的特征,以供后續(xù)任務(wù)使用。
7、損失函數(shù):Mask R-CNN 使用多個(gè)損失函數(shù),包括分類(lèi)損失、回歸損失和分割損失,來(lái)訓(xùn)練模型。
Yolo V3
2016年,Joseph Redmon等人提出的 YOLO 是一種單階段的目標(biāo)檢測(cè)算法,突破性地實(shí)現(xiàn)了實(shí)時(shí)目標(biāo)檢測(cè)。
實(shí)例分割(instance segmentation)是機(jī)器視覺(jué)研究中比較重要、復(fù)雜和具有挑戰(zhàn)性的領(lǐng)域之一。在機(jī)器人,自動(dòng)駕駛,監(jiān)視等領(lǐng)域均有應(yīng)用。
來(lái)源:大前端視野
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29463瀏覽量
211469 -
圖像處理
+關(guān)注
關(guān)注
27文章
1324瀏覽量
57685 -
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7626瀏覽量
90135
原文標(biāo)題:計(jì)算機(jī)視覺(jué)、計(jì)算機(jī)圖像學(xué)、圖像處理等你會(huì)不會(huì)?
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
計(jì)算機(jī)圖形圖像處理最新應(yīng)用分析
機(jī)器視覺(jué)與計(jì)算機(jī)視覺(jué)的關(guān)系簡(jiǎn)述
圖像處理與計(jì)算機(jī)視覺(jué)相關(guān)的書(shū)籍有哪些
用于計(jì)算機(jī)視覺(jué)訓(xùn)練的圖像數(shù)據(jù)集介紹
基于OpenCV的計(jì)算機(jī)視覺(jué)技術(shù)實(shí)現(xiàn)
計(jì)算機(jī)圖形學(xué)總覽:圖像和圖像的概念辨析
基于計(jì)算機(jī)視覺(jué)的自動(dòng)搜索圖像語(yǔ)義分割架構(gòu)

基于計(jì)算機(jī)的圖像處理方法
計(jì)算機(jī)視覺(jué)要學(xué)什么_計(jì)算機(jī)視覺(jué)好找工作嗎
基于計(jì)算機(jī)視覺(jué)的多維圖像智能
用于計(jì)算機(jī)視覺(jué)訓(xùn)練的圖像數(shù)據(jù)集
用于計(jì)算機(jī)視覺(jué)訓(xùn)練的圖像數(shù)據(jù)集
機(jī)器學(xué)習(xí)和計(jì)算機(jī)視覺(jué)的前20個(gè)圖像數(shù)據(jù)集
計(jì)算機(jī)視覺(jué)的十大算法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論