 為什么天線陣列中相鄰兩個天線之間的距離常使用半波長?
為什么天線陣列中相鄰兩個天線之間的距離常使用半波長?
我們回顧一下信號到達角度的計算:
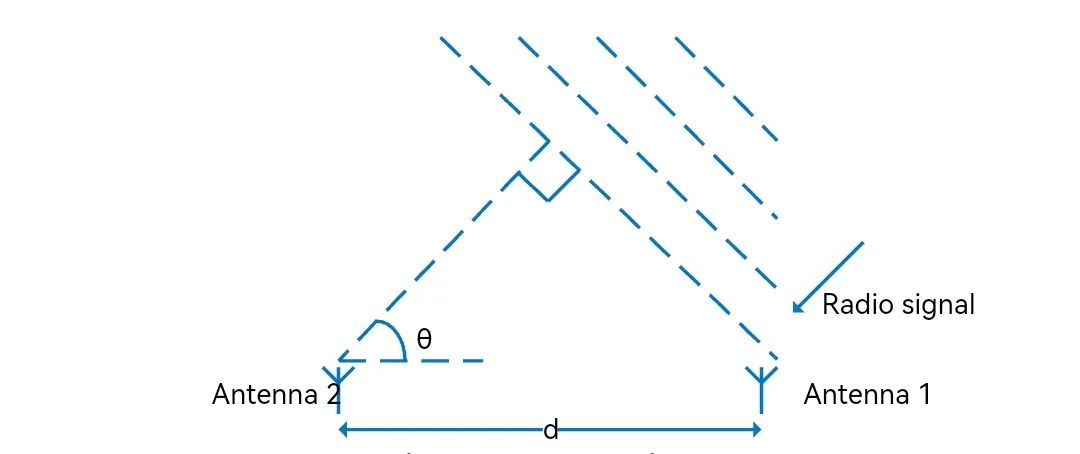
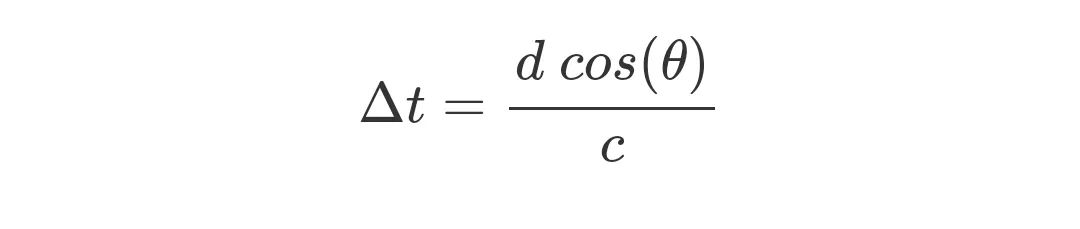
如信號到達角度為θ,兩根天線距離為d,兩根天線上信號到達的時間差:
由于時間差產生的相位差:

通過測量相位差,可以得到信號到達角度:

由于相位差是在-π到π之間,所以要求:  那么當 d 不是λ/2 時,會出現什么樣的情況呢? 我們一直使用天線之間的距離d等于半波長。但有時候,陣列可能無法實現精確的N/2間隔,例如當空間受到限制時,或者當同一陣列必須在各種載波頻率上工作時。 下圖演示了d在λ/2和4λ之間改變示意圖。我們刪除了極坐標圖的下半部分,因為下半部分和上半部分對稱。
那么當 d 不是λ/2 時,會出現什么樣的情況呢? 我們一直使用天線之間的距離d等于半波長。但有時候,陣列可能無法實現精確的N/2間隔,例如當空間受到限制時,或者當同一陣列必須在各種載波頻率上工作時。 下圖演示了d在λ/2和4λ之間改變示意圖。我們刪除了極坐標圖的下半部分,因為下半部分和上半部分對稱。
如你所看到的,除了我們之前討論的180度歧義之外,我們現在還有額外的歧義,并且隨著d變高(額外/不正確的波瓣形成),情況會變得更糟。這些額外的波瓣被稱為光柵波瓣,它們是“空間混疊”的結果。 現在,當 d 小于 λ/2 時會發生什么,例如當我們需要將陣列擬合在狹小空間中時?讓我們重復相同的模擬:
雖然主瓣隨著 d 變低而變寬,但它的最大值仍然是 20 度,并且沒有光柵瓣,因此理論上這仍然有效(至少在高 SNR 下)。為了更好地理解當 d 變得太小時會發生什么,讓我們重復實驗,但有一個來自 -40 度的額外信號:
一旦我們低于 λ/4,兩條不同的路徑之間就沒有區別了,數組的性能很差。 波束形成技術方法非常簡單,但其準確性通常不是很好,雖然有一些波束成形技術可以提供比傳統波束成形更精確的波束,但仍要求保持 d 盡可能接近 λ/2 。
-
信號
+關注
關注
11文章
2842瀏覽量
77920 -
天線陣列
+關注
關注
0文章
25瀏覽量
7702
原文標題:為什么天線陣列中相鄰兩個天線之間的距離常使用半波長?
文章出處:【微信號:射頻學堂,微信公眾號:射頻學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
LabVIEW與MATLAB混合編程在數字天線陣列測試中的實踐驗證
基于應用于方向回溯天線陣的分形雙極化天線仿真和測試
一種采用線極化方式的小型化GPS錐面共形天線陣設計
射頻仿真系統的天線陣列怎么校準?
怎么測量天線陣列系統的插入損耗和插入相移變化量?
基于GA的智能天線系統前端扇區陣列設計
基于GA的智能天線系統前端扇區陣列設計
超寬帶時域天線陣列延時控制掃描實驗
LabVIEW與MATLAB混合編程在數字天線陣列測試中的應
采用多方向天線陣列技術實現微帶陣列天線的設計





 工商網監
工商網監
評論