 can數據幀的標準格式
can數據幀的標準格式
CAN(Controller Area Network)是一種廣泛應用于汽車、工業控制和通信領域的串行通信總線標準。CAN數據幀是CAN總線上傳輸數據的基本單位,它包含了一系列的字段,用于確定消息的標識和傳輸數據。
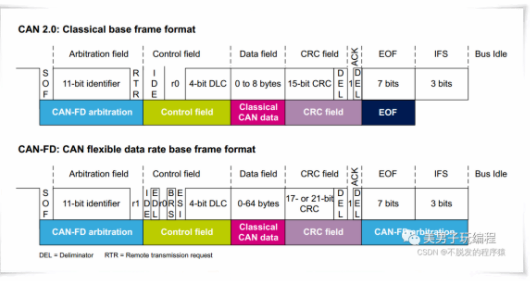
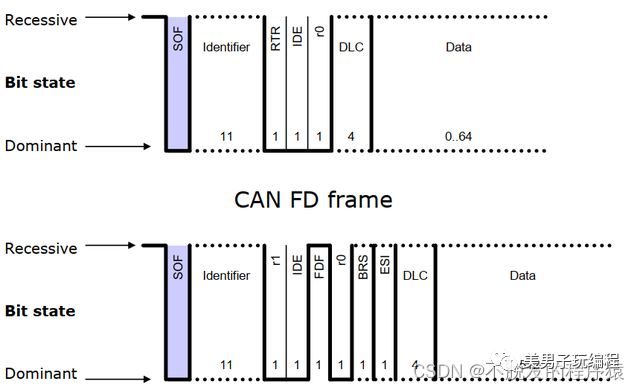
CAN數據幀的標準格式如下:
- 標準標識符(Standard Identifier):11位地址,用于傳輸標準數據幀。
- 擴展標識符(Extended Identifier):29位地址,用于傳輸擴展數據幀。
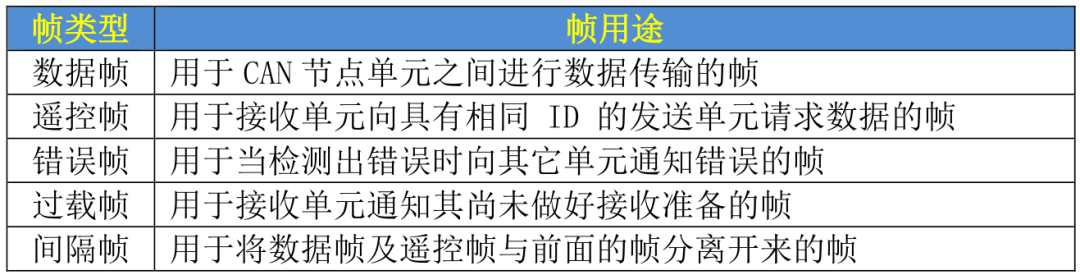
- 錯誤標識碼(Error Frame):11位地址,用于發送錯誤信息。
- 過載幀(Overload Frame):11位地址,用于指示總線過載。
- 遠程傳輸請求(Remote Transmission Request, RTR):該位用于指示發送數據幀還是請求遠程數據幀。如果為1,表示請求遠程數據幀;如果為0,表示發送數據幀。
- 控制位(Control Field):包括數據長度碼(DLC)和保留位(Reserved)。數據長度碼用于定義數據域的長度,取值范圍為0-8字節。
- 數據域(Data Field):包含實際的數據信息,最多可以傳輸8字節的數據。數據域在數據幀中是可選的。
- CRC(Cyclic Redundancy Check, CRC):用于檢測數據傳輸過程中的錯誤。
- 確認位(Acknowledge Slot):由發送節點發送一個應答位(ACK)給接收節點,表示數據幀已正確接收。
- 結束位(End of Frame, EOF):一個高電平信號,表示數據幀的結束。
- 間隔(Interframe Space, IFS):表示兩個連續數據幀之間的間隔。
以上就是CAN數據幀的標準格式。CAN總線使用廣泛,特別適用于在多個ECU(Electronic Control Unit)之間進行高速數據通信。通過使用CAN數據幀,車輛的各個系統可以快速、可靠地傳輸信息,實現實時控制和診斷。CAN數據幀的結構清晰、穩定可靠,確保了數據的可靠傳輸和處理。
總結起來,CAN數據幀的標準格式包含了起始位、標識符、遠程傳輸請求、控制位、數據域、CRC、確認位、結束位和間隔。這些字段共同構成了CAN數據幀,確保了數據的準確傳輸和接收。CAN總線的使用使得車輛和工業領域的各個系統之間能夠快速、可靠地進行通信,極大地提升了系統的效率和可靠性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
CAN
+關注
關注
57文章
2891瀏覽量
466769 -
串行通信
+關注
關注
4文章
586瀏覽量
36031 -
數據幀
+關注
關注
0文章
49瀏覽量
6915
發布評論請先 登錄
相關推薦
熱點推薦
串口數據轉CAN幀格式詳解
MCU沒有CAN或CAN接口數量不夠怎么辦?目前市面上有串口轉CAN的相關模塊或設備,但大家知道串口轉CAN是如何實現的嗎?轉換后的幀
can標準幀和擴展幀的區別
CAN(Controller Area Network)是一種用于汽車和工業領域的通信協議,它允許多個設備在同一總線上進行通信。CAN協議有兩種幀類型:標準
can標準幀和擴展幀能否共存
CAN(Controller Area Network)是一種用于汽車和工業自動化領域的現場總線通信協議。CAN協議具有多種幀格式,包括標準





 工商網監
工商網監
評論