") 交互的藝術(shù):協(xié)作機器人如何定義新一代的人機關(guān)系?
交互的藝術(shù):協(xié)作機器人如何定義新一代的人機關(guān)系?
1996年,美國西北大學(xué)的兩位教授J.Edward Colgate和Michael Peshkin率先提出了“協(xié)作機器人”的概念。他們希望探索一種能夠在確保工人安全的前提下,還能與之和諧共事的機器人。雖然他們的構(gòu)想因當時的技術(shù)局限性未能實現(xiàn),但這種人機協(xié)作的理念將人機交互推向了機器人技術(shù)發(fā)展的前沿。
經(jīng)過多年的技術(shù)革新,終于在2004年,KUKA發(fā)布了全球首個協(xié)作機器人——LBR,隨后2008年,優(yōu)傲機器人(Universal Robots)的UR5首次實現(xiàn)了協(xié)作機器人的商業(yè)成功。自此,協(xié)作機器人也在全球范圍內(nèi)的嶄露頭角。
而今,協(xié)作機器人已經(jīng)成為了制造業(yè)中不可或缺的關(guān)鍵幫手,它不僅大幅提高了生產(chǎn)效率和靈活性,還徹底重塑了工業(yè)生產(chǎn)的面貌。而且隨著成本和技術(shù)的持續(xù)優(yōu)化,開始走向更為豐富的商業(yè)場景。
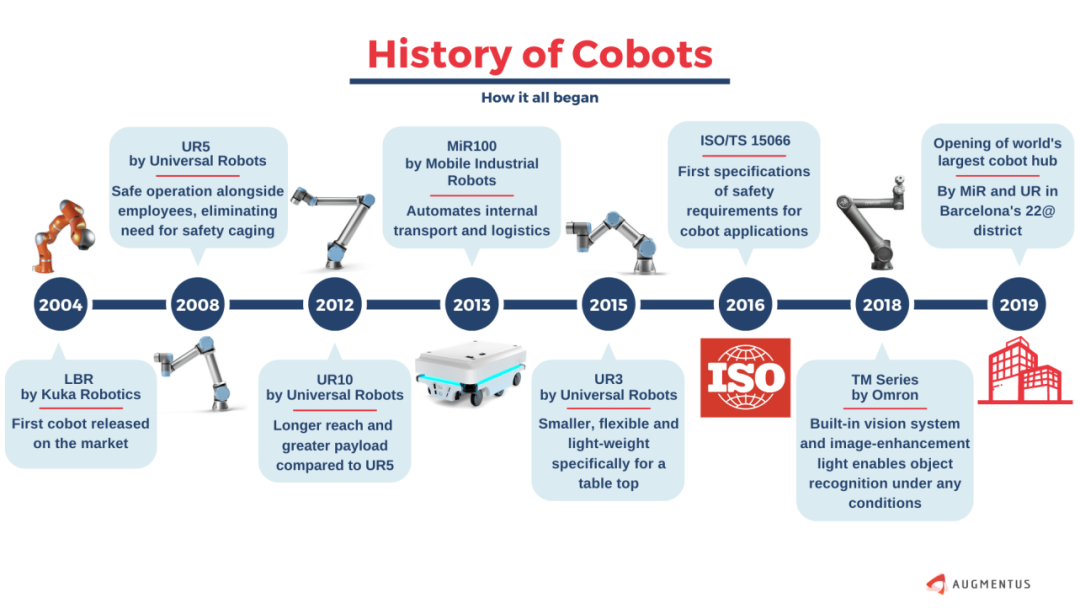
圖1:協(xié)作機器人歷史
(圖源:AUGMENTUS)
從robot到cobot
人機交互的的跨越
協(xié)作式機器人(collaborative robot)簡稱cobot,是可以和人類在同一工作空間中協(xié)同作戰(zhàn),并實現(xiàn)近距離互動的機器人。從機器人(robot)到協(xié)作機器人(cobot),人機交互實現(xiàn)了巨大的跨越式發(fā)展。
傳統(tǒng)機器人是按照預(yù)先編程進行自動作業(yè),或者是在有限的導(dǎo)引下進行作業(yè),缺乏主動避讓人類的安全功能。若需與人共享同一工作空間,傳統(tǒng)機器人就必須配備安全防護裝置,通過人機隔離以保證工人的安全,這自然也就隔斷了人機之間的互動可能。
相較之下,協(xié)作式機器在互動性和安全性方面表現(xiàn)出色,能與人類更密切的合作。機器人發(fā)揮其效率和準確性優(yōu)勢,而人類則發(fā)揮智慧和創(chuàng)造專長。兩者人機協(xié)同,可讓生產(chǎn)制造環(huán)節(jié)在創(chuàng)新和生產(chǎn)力之間取得更好的平衡。
圖2:人機協(xié)作
(圖源:Mechanical Engineering)
工業(yè)4.0時代,制造業(yè)需要更快速、主動地響應(yīng)不斷變化的消費者需求。對于某些定制產(chǎn)品而言,其制造流程和工藝可能都是根據(jù)客戶的個性化需求量身定制的。這種大規(guī)模定制化的制造趨勢,給工廠的裝配工作提出了更高的要求。
據(jù)相關(guān)數(shù)據(jù)顯示,在新時代工業(yè)制造中,裝配工作約占總工作量45%,占總生產(chǎn)成本的20%-30%。而協(xié)作機器人的出現(xiàn),可以大幅提升裝配線效率、精度等,更適合定制化的產(chǎn)線作業(yè),是當前及未來工業(yè)制造中不可替代的“生產(chǎn)工具”。
Brimind是一家汽車類傳感器制造商,其傳感器產(chǎn)品尺寸非常小,重量也很輕,非常考驗機器人的識別精準度和夾持力度。為了提高裝配效率,減少人為失誤造成的損失,Brimind在裝配線的三個站點引入了ABB的GoFa協(xié)作機器人。實際結(jié)果表明:開始時人工純手動方法實現(xiàn)了接近90%的OEE(Overall Equipment Effectiveness,設(shè)備綜合效率),而引入?yún)f(xié)作機器人后,裝配站目前的OEE達到了97%。
另一個案例來自寶馬汽車:汽車差速器的裝配對于精度要求極高,需要將各個部件實現(xiàn)分毫不差的組裝。然而差速器的殼體重達約5.5kg,因此對于裝配人員而言操作困難、耗時較長,且裝配精度難以保證。在引入了KUKA公司的LBR iiwa輕型協(xié)作機器人后,就可以人機協(xié)作實現(xiàn)錐齒輪的靈敏接合,現(xiàn)在差速器和殼體的接合整個過程耗時不到半分鐘。

圖3:BMW使用協(xié)作機器人進行變速器組裝
(圖源:KUKA)
據(jù)Yano Resarch的預(yù)測,2032年全球協(xié)作機器人的出貨量將從2021年的44,204臺增加至約432,514臺;市場規(guī)模從9.94億美元增長至70億美元。
中國是制造業(yè)大國,對于協(xié)作機器人的市場需求也是逐年增加。據(jù)高工機器人產(chǎn)業(yè)研究所(GGII)數(shù)據(jù),2022年我國協(xié)作機器人銷量約為3.5萬臺,整體市場規(guī)模達到了36.05億元。如此大的市場和未來增長前景,吸引了全球協(xié)作機器人企業(yè)的爭先涌入。
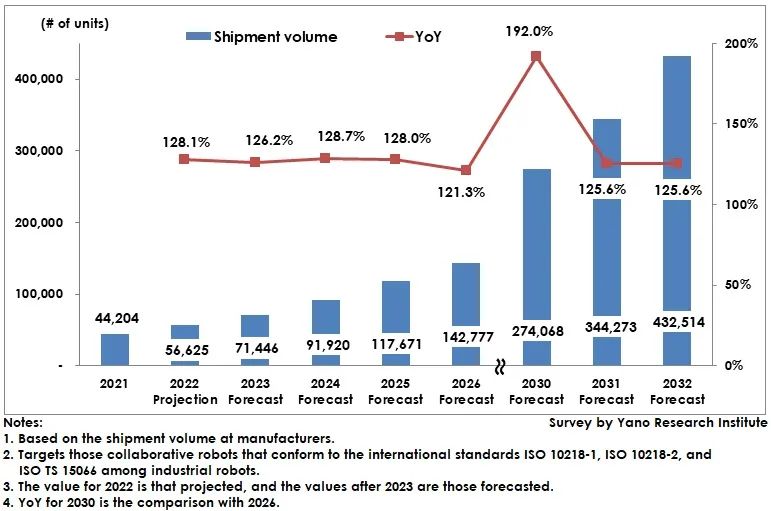
圖4:全球協(xié)作機器人出貨量變化與預(yù)測
(圖源:Yano Research)
更好的前景也吸引了資本的紛紛入局,2022年中國協(xié)作機器人市場共發(fā)生13起,總規(guī)模超過50億元人民幣的融資案例。其中節(jié)卡機器人于2022年7月宣布完成約10億元人民幣D輪融資,創(chuàng)下了協(xié)作機器人領(lǐng)域融資金額新高。
交互能力的實現(xiàn):
感知、計算和HMI缺一不可
協(xié)作機器人要與人類在實時動態(tài)環(huán)境中無縫合作,需要具備強大的交互能力。通過這種交互能力,協(xié)作機器人得以準確快速地理解人類意圖、有效溝通并適應(yīng)動態(tài)環(huán)境。
而這種交互能力的實現(xiàn),需要感知、計算和人機界面(HMI)等多個功能模塊的協(xié)同工作。
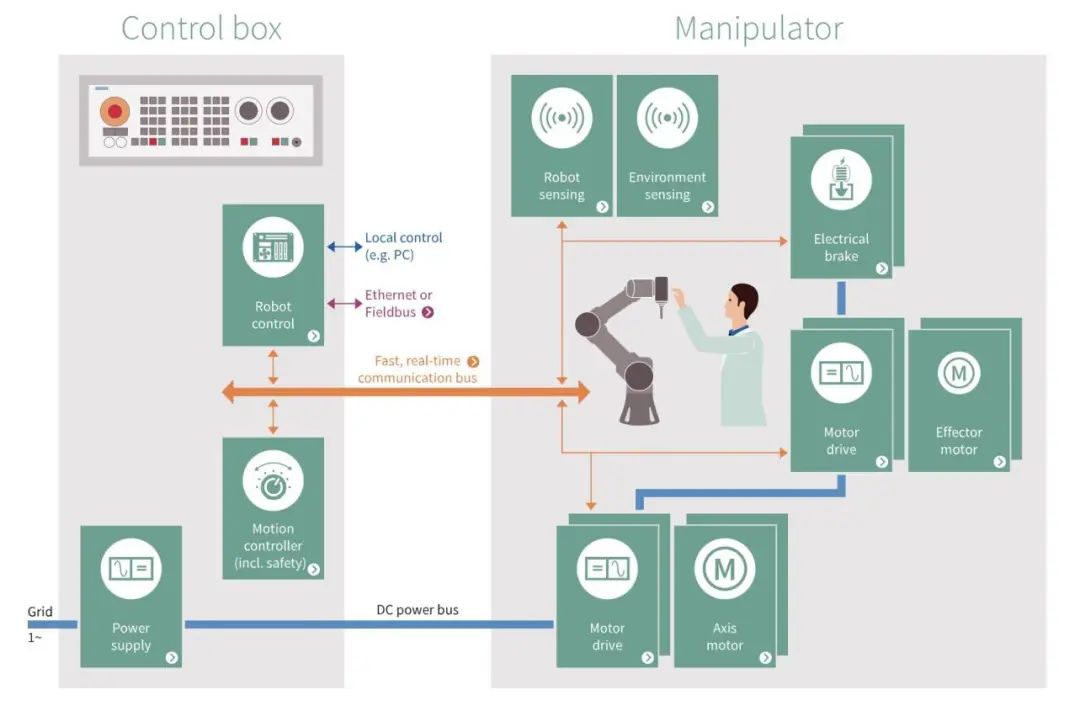
圖5:協(xié)作機器人框圖
(圖源:英飛凌)
感知能力是協(xié)作機器人順利執(zhí)行任務(wù)的基石。具體而言,感知部分分為環(huán)境感知和機器人自身感知兩大類。環(huán)境感知主要依靠傳感器來收集周圍環(huán)境的信息,從而判斷是否滿足工作的條件。而機器人自身感知則通過一系列傳感器,如位置傳感器、力矩傳感器、視覺傳感器、壓力傳感器以及3軸陀螺儀或IMU等,來確保機器人的動作精準無誤,同時實時監(jiān)測人體位置,有效避免任何潛在的相互干擾。
在計算部分,協(xié)作機器人的每個運動軸通常都配備了獨立的微控制單元(MCU)來負責(zé)電機的精準控制。而對于機械臂整體智能的協(xié)調(diào),比如傳感信號的采集、視覺信息的處理、工業(yè)互聯(lián)及人機界面(HMI)等復(fù)雜任務(wù),則需依賴功能更強大的微處理器(MPU)、系統(tǒng)芯片(SoC)或中央處理器(CPU)來實現(xiàn)。這些核心的計算與控制功能,有時直接集成于協(xié)作機器人中,但更多情況下是通過外部的獨立控制器來完成。
至于人機界面(HMI),常見的形式包括觸控屏、交互式按鈕、語音識別系統(tǒng)等。這些界面同樣依賴傳感器與MCU的配合,以實現(xiàn)直觀且高效的人機交互。
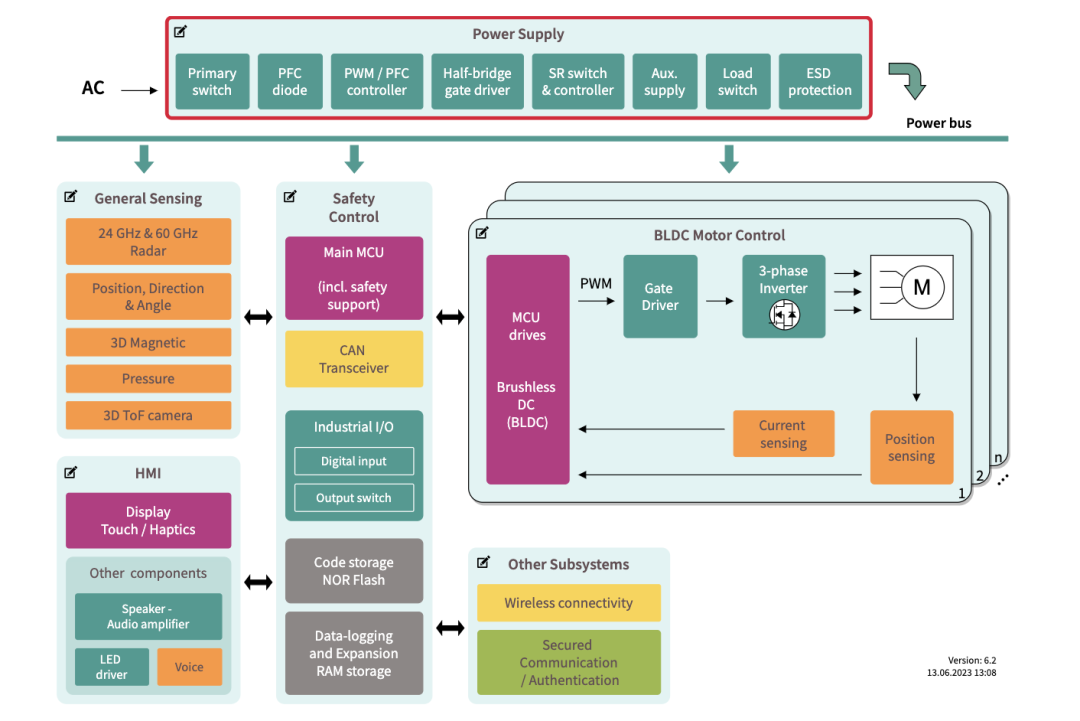
圖6:協(xié)作機器人應(yīng)用框圖
(圖源:英飛凌)
那什么樣的器件才能夠滿足協(xié)作機器人的感知、計算和HMI應(yīng)用需求?接下來我們一同探究。
為電容/電感傳感而生的MCU
電容傳感技術(shù)適用于那些需要觸摸按鈕、滑條、旋鈕、觸控板以及觸摸屏等交互界面的應(yīng)用場景。相較之下,電感傳感技術(shù)則是一種既可靠又經(jīng)濟的方案,它不僅能與現(xiàn)有的用戶界面無縫集成,還能用于檢測金屬或其他導(dǎo)電物體的存在。
英飛凌(Infineon Technologies)提供了先進的CapSense電容傳感和MagSense電感傳感產(chǎn)品,而且還提供了更易與這兩類傳感器結(jié)合的PSoC4系列MCU產(chǎn)品。
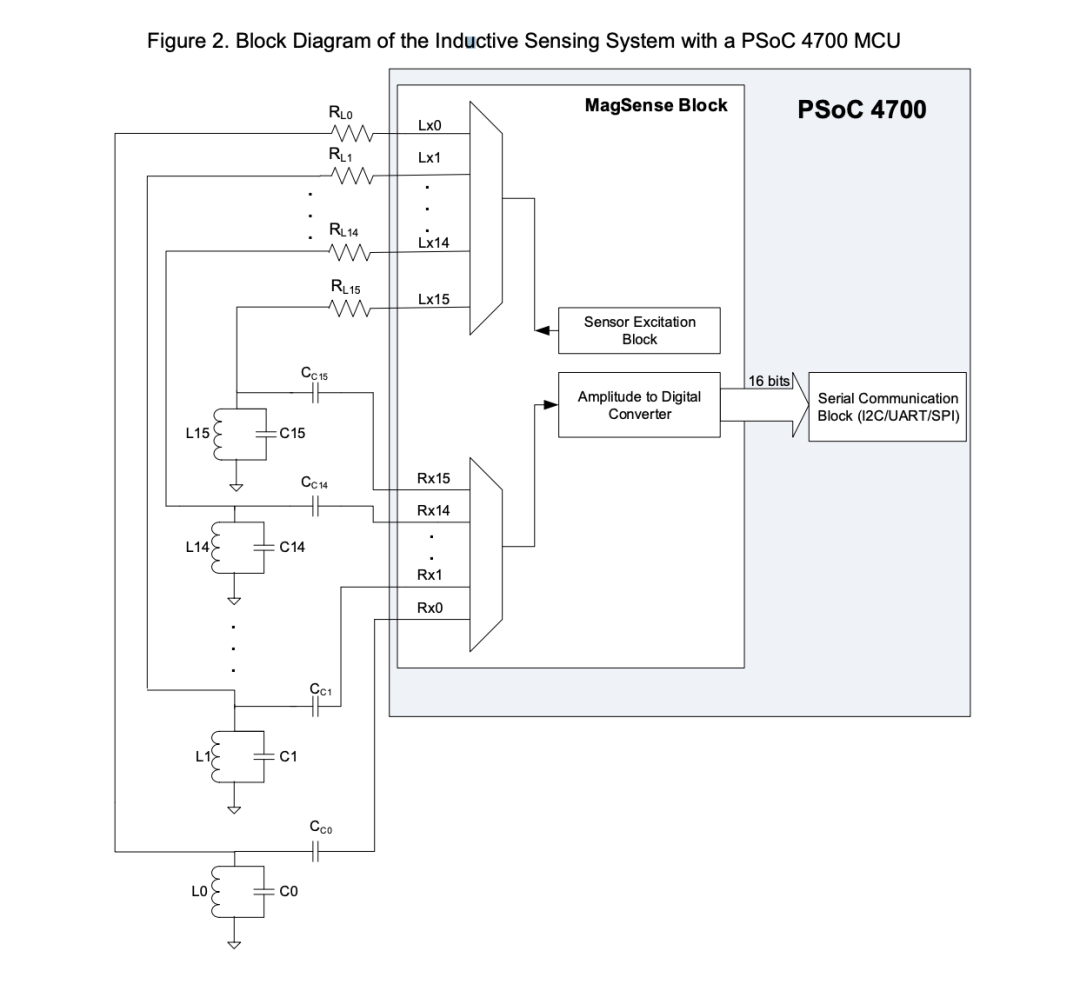
圖7:PSoC4電感應(yīng)用框圖
(圖源:英飛凌)
PSoC4系列微控制器基于Arm Cortex-M0架構(gòu),這不僅保證了較低的能耗,而且其主要特色在于其內(nèi)置的混合信號架構(gòu)。該架構(gòu)配備了豐富的模擬和數(shù)字資源,特別是為CapSense和MagSense量身打造的專用模塊,大大簡化了與電容和電感傳感器的接口設(shè)計,提高了信號處理的效率。
關(guān)于PSoC4系列我們推薦的具體型號為CY8C4024LQS-S411,詳情可在貿(mào)澤電子官網(wǎng)上查詢。
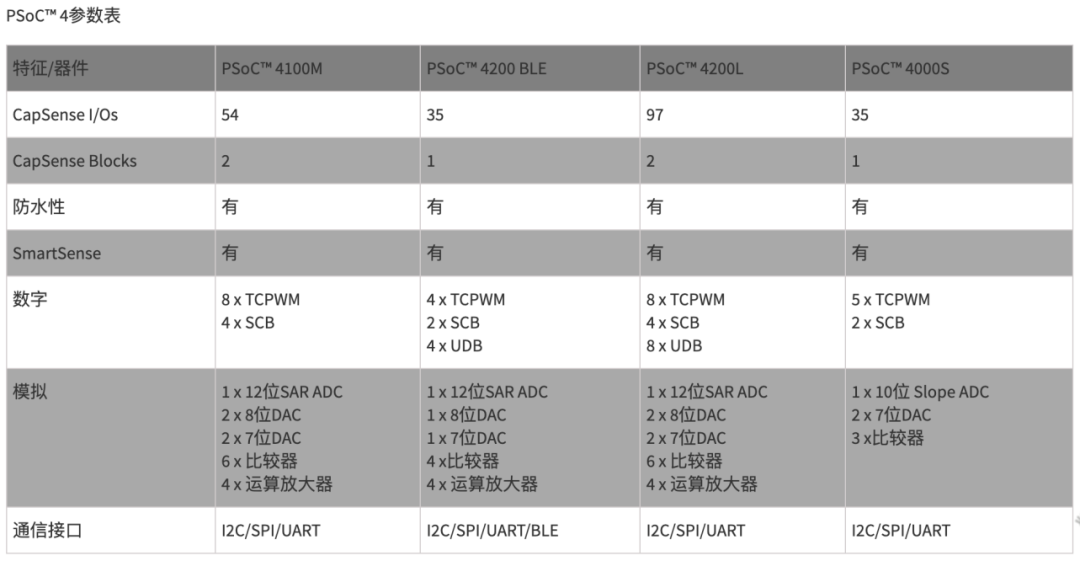
圖8:PSoC4參數(shù)表
(圖源:英飛凌)
賦予機器人聆聽的能力
在人機交互領(lǐng)域,語音互動無疑是實現(xiàn)自然溝通的關(guān)鍵手段之一。機器人能夠通過內(nèi)置麥克風(fēng)捕捉人類的語音指令,并通過揚聲器進行即時反饋,從而實現(xiàn)雙向的語音交流。
對于構(gòu)建高效的語音用戶界面(VUI),英飛凌的XENSIV MEMS麥克風(fēng)系列是不錯的選擇。這一系列的麥克風(fēng)擁有高達105dB的動態(tài)范圍,即便在嘈雜的環(huán)境或高聲壓級下,也能以極低的自噪聲和微小的失真保持音質(zhì)純凈,確保對音頻信號的精準捕捉。
推薦產(chǎn)品型號為IM67D130AXTSA2,詳細信息可在貿(mào)澤電子官網(wǎng)上查詢。
圖9:XENSIV MEMS麥克風(fēng)
(圖源:貿(mào)澤電子)
探索未來:
自然人機交互的新紀元
協(xié)作機器人的人機交互正逐漸邁向其終極目標:打造一種如同人與人交流般自然流暢的互動模式。在這種理想的互動中,哪怕是微妙的眼神和肢體語言都能成為信息傳遞的載體。技術(shù)的不斷進步,尤其是在自然交互與情感表達方面的突破,為我們揭示了這一愿景的實現(xiàn)之路。
隨著大語言模型(LLM)技術(shù)的興起,將其與協(xié)作機器人進行結(jié)合正變得越發(fā)可行。展望未來,人類將能夠借助自然語言與協(xié)作機器人進行溝通,而非局限于預(yù)設(shè)的固定語音指令。得益于語義分析能力的加持,協(xié)作機器人在自然學(xué)習(xí)方面的潛力將得到極大拓展;相比之下,傳統(tǒng)的軌跡學(xué)習(xí)能力不過是冰山一角。曾經(jīng)高大上的手勢識別與追蹤等功能,也將成為協(xié)作機器人的標準配置。
此外,如何強化人們對機器人的信任感也是人機交互研究的重要議題。機器人意圖的可視化表達是增強信任的有效手段之一,這可以通過變換LED燈光顏色或利用顯示屏演繹面部表情等多種方式實現(xiàn)。
而要實現(xiàn)更深層次的無縫協(xié)作,我們可以考慮將虛擬現(xiàn)實(VR)技術(shù)與協(xié)作機器人相結(jié)合,甚至通過腦機接口等尖端技術(shù)實現(xiàn)人與機器共融,從而達到真正的無縫協(xié)作。
隨著技術(shù)的不斷進步與創(chuàng)新,我們正向著實現(xiàn)更加自然、無縫的人機協(xié)作關(guān)系的愿景穩(wěn)步前行。協(xié)作機器人的交互不僅僅是技術(shù)進步的體現(xiàn),更是人類生產(chǎn)方式、工作環(huán)境乃至生活方式的一次深刻變革。這一切的努力,都旨在打造一個人與機器人能夠和諧共處、互助互補的未來世界。
相關(guān)技術(shù)資源
英飛凌觸摸傳感技術(shù),了解詳情>>
英飛凌的XENSIV MEMS麥克風(fēng)系列,了解詳情>>
該發(fā)布文章為獨家原創(chuàng)文章,轉(zhuǎn)載請注明來源。對于未經(jīng)許可的復(fù)制和不符合要求的轉(zhuǎn)載我們將保留依法追究法律責(zé)任的權(quán)利。
關(guān)于貿(mào)澤電子貿(mào)澤電子(Mouser Electronics)是一家全球知名的半導(dǎo)體和電子元器件授權(quán)代理商,分銷超過1200家品牌制造商的680多萬種產(chǎn)品,為客戶提供一站式采購平臺。我們專注于快速引入新產(chǎn)品和新技術(shù),為設(shè)計工程師和采購人員提供潮流選擇。歡迎關(guān)注我們!
更多精彩

原文標題:交互的藝術(shù):協(xié)作機器人如何定義新一代的人機關(guān)系?
文章出處:【微信公眾號:貿(mào)澤電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
貿(mào)澤電子
+關(guān)注
關(guān)注
16文章
1168瀏覽量
97411
原文標題:交互的藝術(shù):協(xié)作機器人如何定義新一代的人機關(guān)系?
文章出處:【微信號:貿(mào)澤電子,微信公眾號:貿(mào)澤電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
慧通測控的協(xié)作機器人有哪些測試項目?

工業(yè)機器人與協(xié)作機器人概念不同

工業(yè)機器人協(xié)作場景中的聚徽電容觸控交互方案:安全急停與精準操控的雙重保障
工業(yè)機器人的未來發(fā)展方向:富唯智能以具身智能重構(gòu)人機協(xié)作新范式
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
具身智能工業(yè)機器人人機交互設(shè)計:重新定義人機協(xié)作新體驗
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
MiR推出MC600移動協(xié)作機器人
協(xié)作機器人正在讓工業(yè)5.0落地生根
協(xié)作機器人TM25S:高效人機協(xié)作改變傳統(tǒng)作業(yè)方式







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論