") 什么是實時操作系統(tǒng)(RTOS)
什么是實時操作系統(tǒng)(RTOS)
什么是實時操作系統(tǒng)(RTOS)
實時操作系統(tǒng)(RTOS)是一種專為實時應用程序設計的操作系統(tǒng)。實時應用程序需要在特定時間內(nèi)做出預測的響應,因此 RTOS 專注于提供對時間約束的強調(diào),以確保系統(tǒng)能夠滿足實時性能要求。
1. 實時性能:
- 硬實時和軟實時: RTOS 可以根據(jù)實時性能的要求分為硬實時和軟實時。硬實時系統(tǒng)對任務的響應時間有極嚴格的要求,任何未能在規(guī)定時間內(nèi)完成的任務都會被認為是失敗。軟實時系統(tǒng)也有時間要求,但相對靈活,任務未能在規(guī)定時間內(nèi)完成并不會導致系統(tǒng)失敗。
2. 任務調(diào)度:
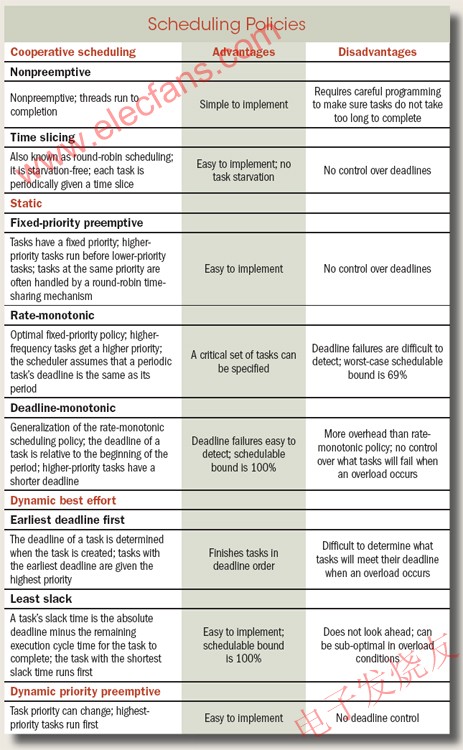
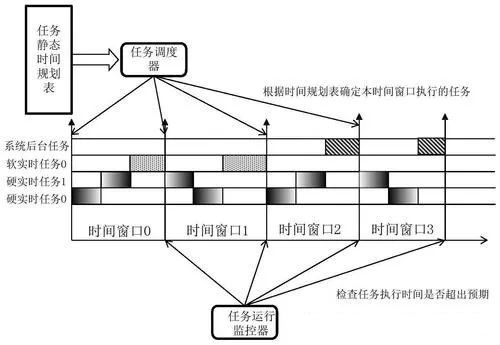
- 實時調(diào)度算法: RTOS 使用實時調(diào)度算法來確定哪個任務將在處理器上運行。這些算法考慮任務的優(yōu)先級、截止期限和其他實時要求。
- 時間片輪轉: 在一些情況下,RTOS 可能使用時間片輪轉調(diào)度,確保每個任務都有機會運行,以防止某個任務長時間獨占處理器。
3. 任務管理:
- 任務創(chuàng)建與刪除: RTOS 允許創(chuàng)建和刪除任務。任務可以是獨立運行的單元,執(zhí)行特定的功能。
- 任務同步和通信: 提供機制使任務能夠同步和通信,如信號量、互斥鎖、消息隊列等。
4. 內(nèi)存管理:
- 動態(tài)內(nèi)存分配: 一些 RTOS 支持動態(tài)內(nèi)存分配,允許在運行時分配和釋放內(nèi)存。
- 靜態(tài)內(nèi)存分配: 為了提高可預測性,一些 RTOS 可能支持靜態(tài)內(nèi)存分配,即在編譯時為任務分配內(nèi)存。
5. 中斷處理:
- 中斷服務例程(ISR): RTOS 允許開發(fā)人員編寫中斷服務例程,以處理硬件中斷事件。
- 中斷優(yōu)先級: 中斷服務例程可以具有不同的優(yōu)先級,RTOS 確保高優(yōu)先級的中斷可以中斷低優(yōu)先級的中斷或任務。
6. 實時時鐘和定時器:
- 實時時鐘: 提供對實時時鐘的支持,以便任務能夠基于實際時間進行調(diào)度和同步。
- 定時器: 允許設置和管理定時器,以在指定時間觸發(fā)任務或事件。
7. 錯誤處理:
- 錯誤檢測與處理: RTOS 通常提供錯誤檢測和處理機制,以確保系統(tǒng)在出現(xiàn)錯誤時能夠采取適當?shù)拇胧?/li>
8. RTOS 應用領域:
- 嵌入式系統(tǒng): RTOS 廣泛應用于嵌入式系統(tǒng),如汽車控制單元、醫(yī)療設備、工業(yè)自動化等。
- 通信系統(tǒng): 在通信系統(tǒng)中,RTOS 用于管理網(wǎng)絡設備、路由器和交換機等。
9. 示例 RTOS:
- FreeRTOS: 一個開源的實時操作系統(tǒng),廣泛用于嵌入式系統(tǒng)。
- VxWorks: 用于嵌入式實時系統(tǒng)的商業(yè) RTOS。
- RTOS-32: 針對 Windows 平臺的實時操作系統(tǒng)。
10. RTOS 與通用操作系統(tǒng)的區(qū)別:
- 實時性能: RTOS 關注實時性能,而通用操作系統(tǒng)通常更注重吞吐量和響應時間。
- 內(nèi)核大小: RTOS 通常具有更小、更精簡的內(nèi)核,以確保快速啟動和響應。
- 任務調(diào)度: RTOS 使用實時調(diào)度算法,以確保任務在規(guī)定時間內(nèi)完成。
實時操作系統(tǒng)在對實時性能有嚴格要求的應用中發(fā)揮著關鍵作用。通過提供對任務調(diào)度、同步、通信和實時時鐘的支持,RTOS 使得開發(fā)者能夠設計和實現(xiàn)對時間要求極高的系統(tǒng)。在嵌入式系統(tǒng)和實時控制領域,RTOS 成為了不可或缺的工具。
FreeRTOS
FreeRTOS 是一個開源的實時操作系統(tǒng),廣泛用于嵌入式系統(tǒng)。FreeRTOS 提供了對任務調(diào)度、同步、通信和實時時鐘的支持,使得開發(fā)者能夠設計和實現(xiàn)對時間要求極高的系統(tǒng)。FreeRTOS 通過 MIT 開源許可免費分發(fā),包括一個內(nèi)核和一組不斷豐富的 IoT 庫,適用于所有行業(yè)領域。FreeRTOS 的構建突出可靠性和易用性。
FreeRTOS 的開發(fā)活動已從 SVN 遷移到 GitHub,現(xiàn)在可以直接在 FreeRTOS 的 Github頁面上找到。從 GitHub 下載 FreeRTOS 早期版本 的標準 zip (.zip) 文件或自解壓 zip 文件 (.exe) 。解壓縮 源代碼,同時確保不改動文件夾結構。
FreeRTOS 官方下載頁有兩個版本的下載包,一個是最新版,一個是長期支持(LTS)版。最新版下載包包含最新 FreeRTOS 內(nèi)核 、 FreeRTOS-Plus 庫 和 AWS IoT 庫,以及示例項目。長期支持版下載包則包含 FreeRTOS LTS 庫,其中包括 FreeRTOS 內(nèi)核和 IoT 庫,但沒有示例項目。可以根據(jù)自己需要選擇下載。
因為手上正好有 ESP32-C3 小飛控板,所以接下來的 playground 就以這個小板子為例了。而 ESP-IDF 中已經(jīng)集成了 FreeRTOS,所以我們可以直接使用 ESP-IDF 來開發(fā) FreeRTOS 應用。
Hello World
配置好 ESP-IDF 開發(fā)環(huán)境后,按照以下步驟配置實現(xiàn)本示例項目:
步驟 1: 安裝 ESP-IDF
確保你已經(jīng)安裝了 ESP-IDF。你可以按照 Espressif 的官方文檔 ESP-IDF 安裝指南進行安裝。
步驟 2: 創(chuàng)建新項目
- 打開終端或命令提示符窗口,切換到你希望創(chuàng)建項目的目錄。
- 運行以下命令來創(chuàng)建一個新的 ESP-IDF 項目:
idf.py create-project hello_world
這將創(chuàng)建一個包含默認項目結構的新目錄。
步驟 3: 進入項目目錄
cd < project-name >
步驟 4: 配置項目
- 運行以下命令配置項目:
idf.py menuconfig
這將打開一個菜單配置界面,你可以在其中配置項目的各種選項,包括串口設置、Wi-Fi 配置、組件選項等。配置完成后,保存并退出。
- (可選) 如果你想使用 VSCode 或其他 IDE 進行開發(fā),可以運行以下命令生成 IDE 項目文件:
idf.py vscode
這將生成與 Visual Studio Code 兼容的配置文件。
步驟 5: 編譯和燒錄
在main目錄下找到hello_world_main.c文件,寫入以下內(nèi)容:
#include < stdio.h >
#include < inttypes.h >
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_chip_info.h"
#include "esp_flash.h"
void app_main(void)
{
printf("Hello world!n");
/* Print chip information */
esp_chip_info_t chip_info;
uint32_t flash_size;
esp_chip_info(&chip_info);
printf("This is %s chip with %d CPU core(s), %s%s%s%s, ",
CONFIG_IDF_TARGET,
chip_info.cores,
(chip_info.features & CHIP_FEATURE_WIFI_BGN) ? "WiFi/" : "",
(chip_info.features & CHIP_FEATURE_BT) ? "BT" : "",
(chip_info.features & CHIP_FEATURE_BLE) ? "BLE" : "",
(chip_info.features & CHIP_FEATURE_IEEE802154) ? ", 802.15.4 (Zigbee/Thread)" : "");
unsigned major_rev = chip_info.revision / 100;
unsigned minor_rev = chip_info.revision % 100;
printf("silicon revision v%d.%d, ", major_rev, minor_rev);
if(esp_flash_get_size(NULL, &flash_size) != ESP_OK) {
printf("Get flash size failed");
return;
}
printf("%" PRIu32 "MB %s flashn", flash_size / (uint32_t)(1024 * 1024),
(chip_info.features & CHIP_FEATURE_EMB_FLASH) ? "embedded" : "external");
printf("Minimum free heap size: %" PRIu32 " bytesn", esp_get_minimum_free_heap_size());
for (int i = 10; i >= 0; i--) {
printf("Restarting in %d seconds...n", i);
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
printf("Restarting now.n");
fflush(stdout);
esp_restart();
}
這段代碼將輸出"Hello World!",并打印一些芯片基本信息。
- 使用以下命令編譯項目:
idf.py build
- 使用以下命令燒錄固件到 ESP32:
idf.py -p < PORT > flash
其中 ls /dev/tty*(在 Linux/macOS)或 mode 命令(在 Windows)來查找端口。
步驟 6: 監(jiān)視串口輸出
- 使用以下命令啟動監(jiān)視串口輸出:
idf.py -p < PORT > monitor
這將打開一個窗口,顯示 ESP32 的串口輸出。你可以看到程序的調(diào)試信息和日志。
- 如果你修改了代碼并重新編譯,可以使用以下命令重新燒錄并啟動監(jiān)視:
idf.py -p < PORT > flash monitor
運行成功的話,應該會在控制臺輸出類似以下內(nèi)容:
Hello world!
This is esp32c3 chip with 1 CPU core(s), WiFi/BLE, silicon revision v0.4, 2MB external flash
Minimum free heap size: 330392 bytes
Restarting in 10 seconds...
Restarting in 9 seconds...
Restarting in 8 seconds...
Restarting in 7 seconds...
Restarting in 6 seconds...
Restarting in 5 seconds...
Restarting in 4 seconds...
Restarting in 3 seconds...
Restarting in 2 seconds...
Restarting in 1 seconds...
Restarting in 0 seconds...
Restarting now.
-
嵌入式系統(tǒng)
+關注
關注
41文章
3667瀏覽量
130905 -
操作系統(tǒng)
+關注
關注
37文章
7091瀏覽量
124959 -
RTOS
+關注
關注
24文章
841瀏覽量
120768 -
FreeRTOS
+關注
關注
12文章
490瀏覽量
63753 -
實時操作系統(tǒng)
+關注
關注
1文章
202瀏覽量
31214
發(fā)布評論請先 登錄
一文詳解實時操作系統(tǒng)(RTOS)
實時操作系統(tǒng)RTOS有什么要點?
嵌入式實時操作系統(tǒng)(RTOS)
怎樣去更好地使用嵌入式實時操作系統(tǒng)RTOS呢
選擇實時操作系統(tǒng)(RTOS)的要點詳解
MSP432 MCU 提供多個實時操作系統(tǒng) (RTOS) 解決方案
如何安裝實時操作系統(tǒng)RTOS

什么是實時操作系統(tǒng)(RTOS)
實時操作系統(tǒng)RTOS相比裸機的優(yōu)勢有哪些?
選擇實時操作系統(tǒng)(RTOS)的要點詳解
選擇實時操作系統(tǒng)(RTOS)的要點詳解
實時操作系統(tǒng)(RTOS)和分時操作系統(tǒng)(TSOS)的區(qū)別
帶你認識實時操作系統(tǒng)(rtos)
揭秘LuatOS:實時操作系統(tǒng)RTOS核心庫的關鍵技術剖析!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論