") PCL中最遠點采樣是什么
PCL中最遠點采樣是什么
最遠點采樣(Farthest Point Sampling)
這里我們來單獨看一下調(diào)用代碼,這里可以看到PCL中支持直接調(diào)用farthest_sampling這個函數(shù)可以實現(xiàn)最遠點采樣。
最遠點采樣(Farthest Point Sampling)是一種非常常用的采樣算法,由于能夠保證對樣本的均勻采樣,被廣泛使用,像3D點云深度學習框架中的PointNet++對樣本點進行FPS采樣再聚類作為感受野,3D目標檢測網(wǎng)絡(luò)VoteNet對投票得到的散亂點進行FPS采樣再進行聚類,6D位姿估計算法PVN3D中用于選擇物體的8個特征點進行投票并計算位姿。FPS算法原理:
1、輸入點云有N個點,從點云中選取一個點P0作為起始點,得到采樣點集合S={P0};
2、計算所有點到P0的距離,構(gòu)成N維數(shù)組L,從中選擇最大值對應的點作為P1,更新采樣點集合S={P0,P1};
3、計算所有點到P1的距離,對于每一個點Pi,其距離P1的距離如果小于L[i],則更新L[i] = d(Pi, P1),因此,數(shù)組L中存儲的一直是每一個點到采樣點集合S的最近距離;
3、選取L中最大值對應的點作為P2,更新采樣點集合S={P0,P1,P2};
4、重復2-4步,一直采樣到N’個目標采樣點為止。
std::vector< pcl::PointCloud< pcl::PointXYZ >> input_point_clouds(1);
std::vector< pcl::PointCloud< pcl::PointXYZ >> output_point_clouds;
ASSERT_NE(pcl::io::loadPLYFile< pcl::PointXYZ >(STR(INPUT_POINT_CLOUD_PATH),
input_point_clouds[0]), -1) < < "Couldn't read file test point cloud file";
farthest_sampling::samplePointCloudsCuda(input_point_clouds, output_point_clouds, 4096);
boost::filesystem::path output_path = STR(OUTPUT_POINT_CLOUD_PATH);
if (output_path.has_parent_path() && !boost::filesystem::exists(output_path.parent_path()))
{
boost::filesystem::create_directories(output_path.parent_path());
}
pcl::io::savePLYFile(STR(OUTPUT_POINT_CLOUD_PATH), output_point_clouds[0]);
ASSERT_EQ(output_point_clouds[0].size(), 4096);
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
plc
+關(guān)注
關(guān)注
5031文章
13736瀏覽量
472255 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4371瀏覽量
64221 -
采樣
+關(guān)注
關(guān)注
1文章
127瀏覽量
25922
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
當PCL翻轉(zhuǎn)PCLATH不增加,PC中的這個翻轉(zhuǎn)不改變PCLATH位
你好。PIC16F87具有PCL存儲的13位PC、LSB字節(jié)、PCLSATE中的MSB 5位。問題是當PCL翻轉(zhuǎn)PCLATH不增加時。請記住,PC中的這個翻轉(zhuǎn)不改變PCLATH位:它們必須顯式地更改
發(fā)表于 09-26 10:33
關(guān)于232的NCL,PCL的疑問
有沒有大神接觸過這種232通訊的儀表,上面有NCL RXD,NCL TXD;PCL RXD,PCL TXD。這種能用DB9的芯片去采集數(shù)據(jù)嗎?我用DB9的RXD去接它的 NCL TXD,數(shù)據(jù)偶爾會有一位的偏移,請問該怎么正確的采集它的數(shù)據(jù),拜謝
發(fā)表于 11-07 16:15
PCL6143運動控制器原理及應用
PCL6143運動控制器的原理及應用 可以用于設(shè)計開發(fā)相應的芯片電路。介紹了PCL6143 的功能結(jié)構(gòu)、主要寄存器以及指令系統(tǒng)。設(shè)計了一款基于PC104總線的四軸運動控制卡, 介紹了如何編寫運動控制卡的功能函數(shù)庫。
發(fā)表于 09-26 08:14
系統(tǒng)辨識中最優(yōu)采樣間隔的確定
針對如何確定連續(xù)系統(tǒng)辨識中最優(yōu)采樣間隔的問題,根據(jù)復平面中辨識模型的特征值到原點的距離判斷采樣間隔是否合理,利用折半查找算法,設(shè)計了一種在給定的范圍內(nèi)尋找系統(tǒng)辨識
發(fā)表于 07-24 15:41
?0次下載
PCL電梯控制系統(tǒng)
電子設(shè)計研發(fā)部分的研發(fā)人員常用資料,PCL電梯控制系統(tǒng),感興趣的可以瞧一瞧。
發(fā)表于 11-03 14:53
?68次下載
車載自組網(wǎng)中最遠轉(zhuǎn)發(fā)機制的可靠性改進
車載自組網(wǎng)是傳統(tǒng)的移動自組織網(wǎng)絡(luò)在交通道路上的應用。在車載自組網(wǎng)中,最遠轉(zhuǎn)發(fā)機制口3能夠有效降低數(shù)據(jù)傳播跳數(shù),減少冗余發(fā)送,但最遠轉(zhuǎn)發(fā)機制的可靠性將因最遠節(jié)點失效而受到影響。在分析和實驗驗證節(jié)點高速
發(fā)表于 11-25 11:52
?0次下載
Lane Tech HS PCL自動燈開源
電子發(fā)燒友網(wǎng)站提供《Lane Tech HS PCL自動燈開源.zip》資料免費下載
發(fā)表于 02-08 15:28
?1次下載

Lane Tech PCL房間通知器開源分享
電子發(fā)燒友網(wǎng)站提供《Lane Tech PCL房間通知器開源分享.zip》資料免費下載
發(fā)表于 06-26 14:37
?0次下載
在Ubuntu上編譯安裝pcl教程
編譯安裝PCL(Point Cloud Library)是在Ubuntu上使用自定義選項進行安裝的一種方式。
PCL中基礎(chǔ)下采樣介紹
顧名思義,隨機下采樣就似乎在原始點云中隨機采樣一定點數(shù)的點。這種方法最終得到的點云數(shù)量也是固定的。 pcl::PointCloud ::Ptr cloud_sub( new pcl
PCL中法線空間采樣介紹
法線空間采樣 NormalSpaceSampling即:法線空間采樣,它在法向量空間內(nèi)均勻隨機抽樣,使所選點之間的法線分布盡可能大,結(jié)果表現(xiàn)為地物特征變化大的地方剩余點較多,變化小的地方剩余點稀少
PCL泊松盤采樣具體流程
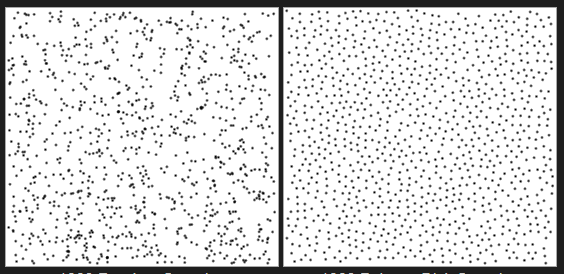
泊松盤采樣 泊松盤采樣(possion disk sampling)的特點是任何兩個點的距離都不會隔得太近。 比如下圖,左邊是隨機生成的點,右邊是泊松盤采樣生成的點。 具體流程如下: 1、設(shè)定好兩個
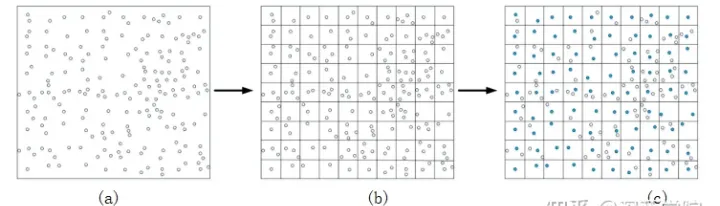
PCL中非均勻體素采樣介紹
非均勻體素采樣 SamplingSurfaceNormal,將輸入空間劃分為網(wǎng)格,直到每個網(wǎng)格中最多包含N個點,并在每個網(wǎng)格中隨機采樣點。 使用每個網(wǎng)格的N個點計算法線。 在網(wǎng)格內(nèi)采樣





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論