") 機(jī)器人關(guān)節(jié)國產(chǎn)MCU AT32F403 DRV8313磁編碼BLDC FOC直流無刷電機(jī)說明
機(jī)器人關(guān)節(jié)國產(chǎn)MCU AT32F403 DRV8313磁編碼BLDC FOC直流無刷電機(jī)說明
背景說明
最近調(diào)試一款機(jī)器人產(chǎn)品,用到了之前的伺服電機(jī)FOC控制,實(shí)現(xiàn)了幾個(gè)電機(jī)串聯(lián),用來實(shí)現(xiàn)機(jī)器人手臂控制,現(xiàn)在做機(jī)器人的很多,覺得這套方案可以幫助更多的人,快速搭建控制系統(tǒng),實(shí)現(xiàn)關(guān)節(jié)手臂的控制,以及路徑規(guī)劃,而不用被串聯(lián)、調(diào)參、電機(jī)驅(qū)動(dòng)所束縛。所以把這套方案單獨(dú)拿出來,希望可以幫助大家。
因?yàn)槲疫@邊努力實(shí)現(xiàn)***全覆蓋(很難,坑太多了),所以就把原來STM32上跑的程序全部移植在國產(chǎn)的MCU AT32F403當(dāng)中,一看這個(gè)名稱大家也都明白,這個(gè)芯片跟STM32也是有淵源的。電源芯片我也用了國產(chǎn)的芯片,說實(shí)話,吃了不少虧,但想想幫著***廠家盡一份微薄之力,也就釋然了。寶貝淘寶店里面有上,也希望更多的開發(fā)者都支持***!開發(fā)不易也希望大家多多支持筆者!
在用戶調(diào)試過程中,筆者會(huì)指導(dǎo)和提供開發(fā)者級(jí)別的技術(shù)支持,如果改動(dòng)工作不大,筆者會(huì)盡量滿足用戶的需求,并在線解決調(diào)參軟件以及代碼調(diào)試中遇到的各種各樣的坑!這一點(diǎn)絕對(duì)屏蔽網(wǎng)上各種惡意剽竊。所以價(jià)格高些,用戶多了也支持不過來,請(qǐng)大家理解,覺得貴的請(qǐng)繞道,提前謝了!
網(wǎng)上電機(jī)FOC控制有很多文章視頻,包括一些開發(fā)板。但是講解的也都不太好理解,程序分支也是比較多,最不能容忍的是動(dòng)不動(dòng)燒板子。所以我就來個(gè)簡潔明了,直接就是這款A(yù)T32F403+DRV8313實(shí)現(xiàn)多軸直流無刷電機(jī)BLDC的FOC控制,以及IMU以及磁編碼器調(diào)參。
嵌入式硬件
硬件主控芯片AT32F403A,240MHz主頻,但是因?yàn)楣膯栴},我把主頻控制在140MHz,要跑IMU6050姿態(tài)解算的算法、電機(jī)控制、磁編碼器解算控制,以及和子板通信控制。
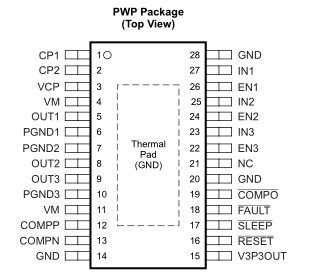
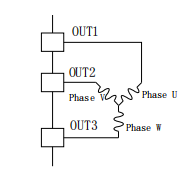
電機(jī)驅(qū)動(dòng)還是用的DRV8313,磁編碼用的是AS5600,說實(shí)話沒找到比較滿意的替代芯片。
電源輸入采用的寬電壓輸入,9~36V,大家可以調(diào)整輸入電壓得到比較理想的電機(jī)驅(qū)動(dòng)效果。好多市面上的FOC板子動(dòng)不動(dòng)就燒了,還是電源以及管子的導(dǎo)通開關(guān)沒有做好,我這個(gè)板子可以支持3A的電流,我用了這么多,調(diào)試了這么長時(shí)間還沒有燒板子燒電機(jī)的。當(dāng)然,這個(gè)調(diào)試和使用習(xí)慣也有關(guān)系(筆者自己手欠欠的測(cè)量信號(hào),導(dǎo)致IIC信號(hào)和輸入12V短路,一窩燒了串聯(lián)的3塊板子,心疼的不得了)。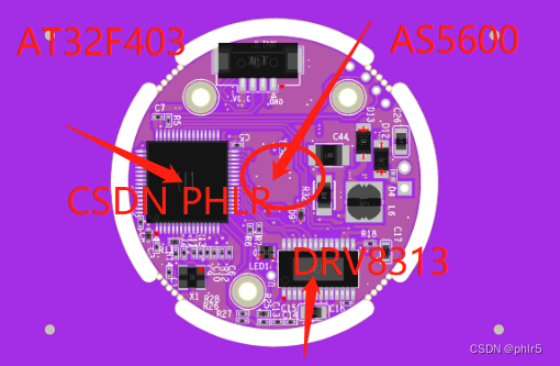
主板和子板通過IIC鏈接,只有4根線,其他線備用。特殊場(chǎng)景下,走線可以穿軸,這樣更靈活。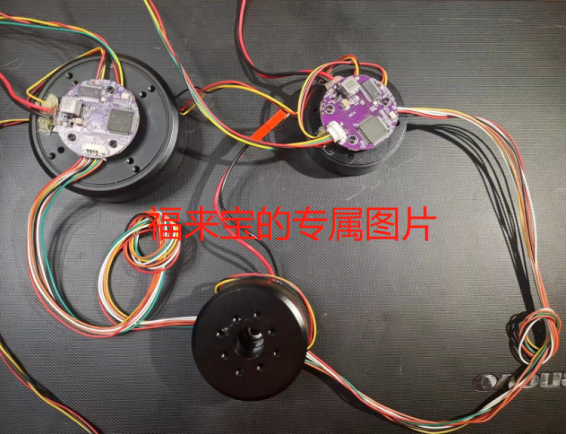
配置使用說明
拿到板卡,和資料,先打開調(diào)參軟件,讓我們先來熟悉一下界面:
電機(jī)控制頁如下圖: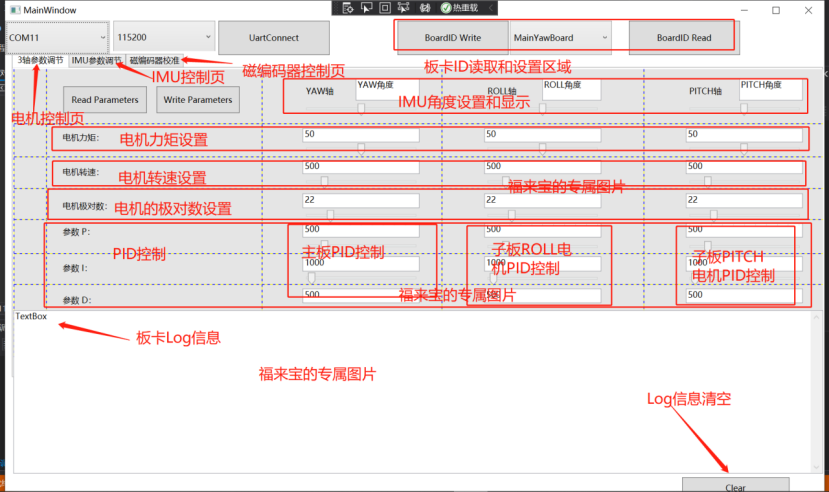
IMU控制頁如下圖: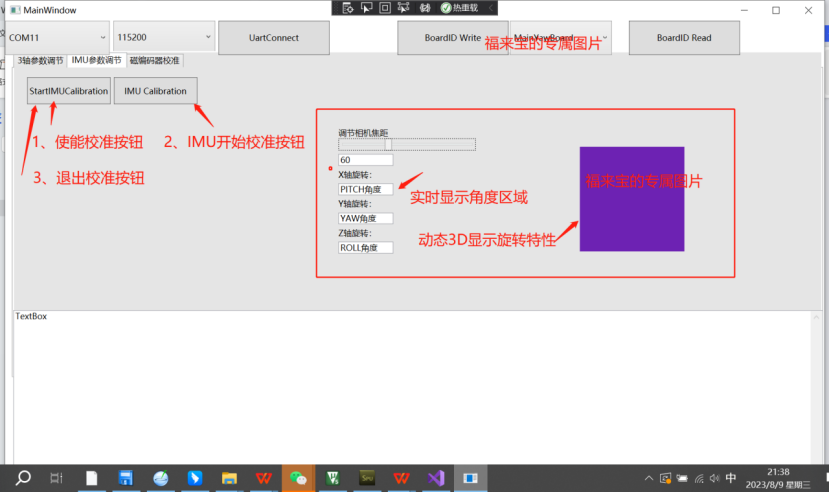
磁編碼器控制頁如下圖: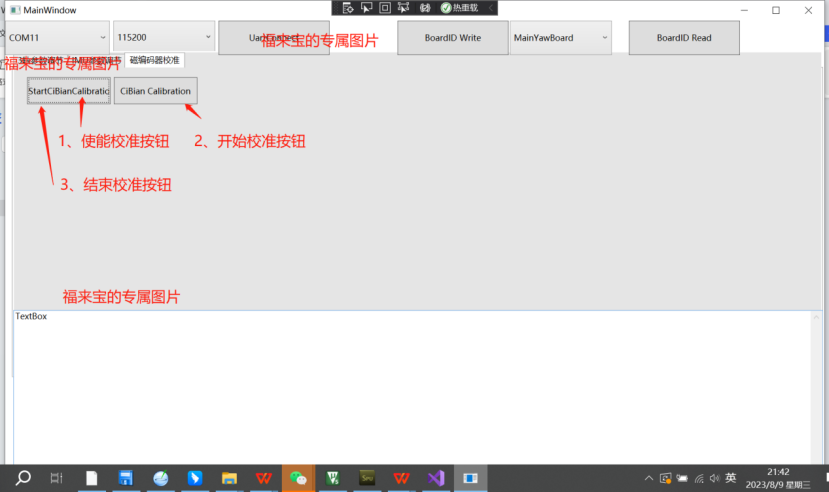
升級(jí)頁面如下(新增功能):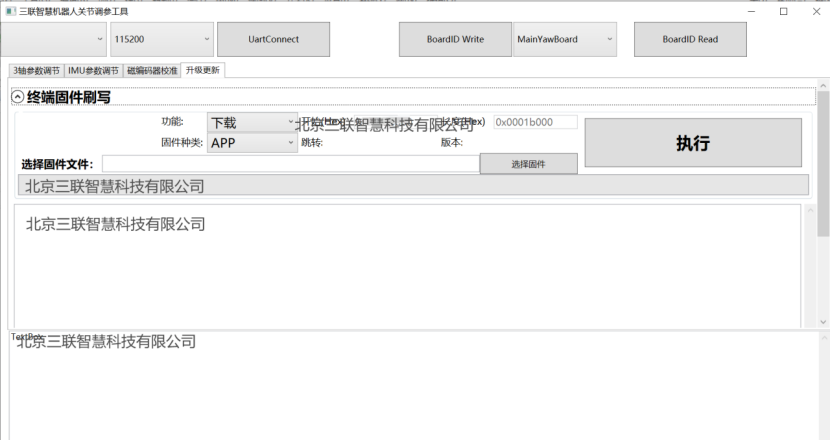
1、第一步,設(shè)置BoardID:
所有的電機(jī)默認(rèn)都是主板YAW軸控制板。通過PC調(diào)參軟件進(jìn)行板卡ID的設(shè)置,使板卡可以配置成為子板。
接好線路,接通12V電源,接好串口,串口接在當(dāng)前的板卡,設(shè)置當(dāng)前的板卡BoardID。注意,BoardID不同其他參數(shù)設(shè)置,不同串行設(shè)置。
1、第二步,校準(zhǔn)磁編碼器:
如果是多個(gè)板卡,請(qǐng)串行接好板卡,主板接好串口和電源。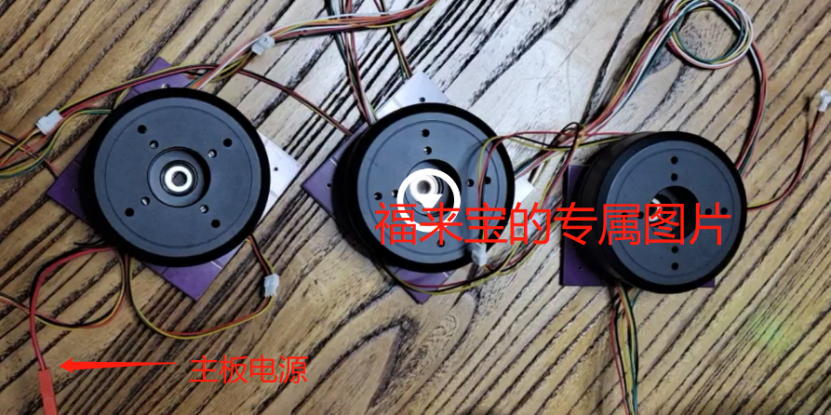
之后電機(jī)磁編碼器控制頁面,進(jìn)行如下步驟校準(zhǔn)磁編碼器: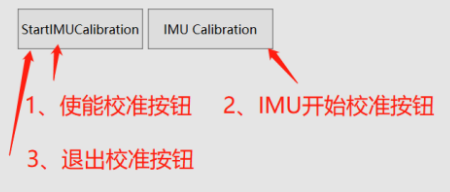
1、第三步,如果有IMU,開始校準(zhǔn)IMU,方法同第二步類似。
2、第四步,調(diào)整電機(jī)參數(shù):
調(diào)參前請(qǐng)先點(diǎn)擊“Read Parameters”按鈕,讀出板卡中的現(xiàn)有參數(shù)。
電機(jī)調(diào)參包括極對(duì)數(shù)、力矩、轉(zhuǎn)速、以及電機(jī)PID調(diào)整。
每一項(xiàng)都是拖動(dòng)滑動(dòng)條,進(jìn)行調(diào)參,調(diào)參完成點(diǎn)擊“Write Parameters”按鈕,保存參數(shù)。調(diào)參完成點(diǎn)擊“Write Parameters”按鈕,保存參數(shù)。調(diào)參完成點(diǎn)擊“Write Parameters”按鈕,保存參數(shù)。重要的事情說三遍!!!
參數(shù)如下圖: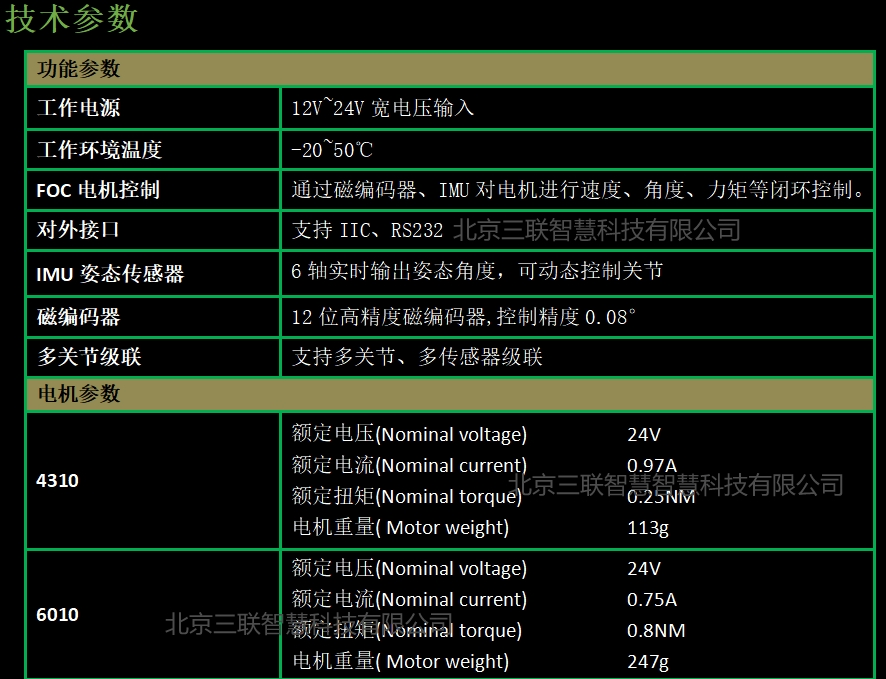
IMU參數(shù):參考MPU-6050 Spec。
磁編碼器參數(shù):參考AS5600 12-Bit Programmable Contactless Potentiometer Spec。
包裝如下圖:

審核編輯:湯梓紅
-
mcu
+關(guān)注
關(guān)注
146文章
17847瀏覽量
360623 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29504瀏覽量
211621 -
FOC
+關(guān)注
關(guān)注
21文章
339瀏覽量
43925 -
直流無刷電機(jī)
+關(guān)注
關(guān)注
15文章
302瀏覽量
24172
發(fā)布評(píng)論請(qǐng)先 登錄
樂高機(jī)器人中文教程——機(jī)器人入門
BLDC電流聲及堵轉(zhuǎn)聲響--磁編碼器換相
智能自動(dòng)化設(shè)備電機(jī)驅(qū)動(dòng)芯片國產(chǎn)優(yōu)選推薦
工業(yè)機(jī)器人的末端關(guān)節(jié)旋轉(zhuǎn)該精確控制?
DRV8313半橋驅(qū)動(dòng)器中文資料
機(jī)器人關(guān)節(jié)用什么電機(jī)?
DRV8313無刷電機(jī)驅(qū)動(dòng)器功能不正常
基于 MSPM0 MCU 實(shí)現(xiàn)使用無傳感器 FOC 算法的 BLDC/ PMSM 控制
DRV8313 三個(gè)半 H橋驅(qū)動(dòng)器集成電路 (IC)
DRV8313 三路 1/2 H 橋驅(qū)動(dòng)器 IC

機(jī)器人關(guān)節(jié)用什么電機(jī)
機(jī)器人關(guān)節(jié)用什么電機(jī),機(jī)器人關(guān)節(jié)電機(jī)可分為哪幾種
BLDC直流無刷電機(jī)驅(qū)動(dòng)

MS8313替代DRV8313 三個(gè)半 H 橋驅(qū)動(dòng)器集成電路





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論