 動力域控制器的功能和測試項目
動力域控制器的功能和測試項目
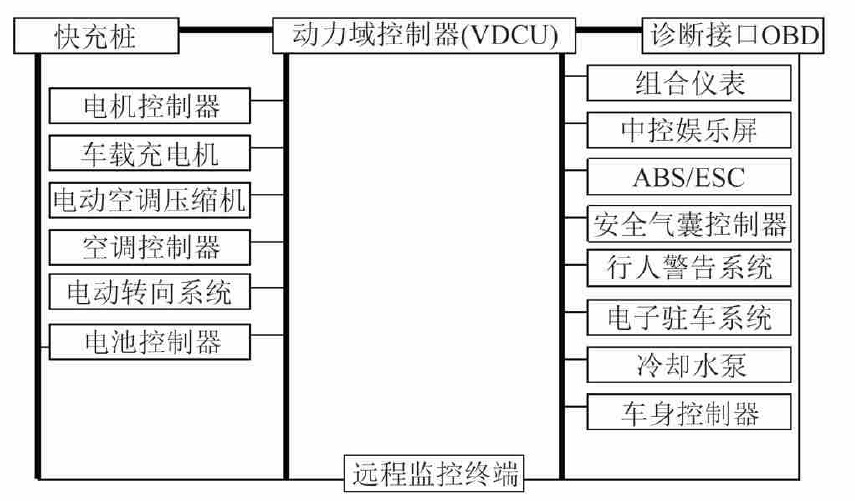
動力域控,顧名思義就是動力相關的域控制器,對于純電車而言,包括電池管理、電機控制器、空調控制器、DCDC等等,下面是比亞迪的動力域控制器。
比亞迪動力域
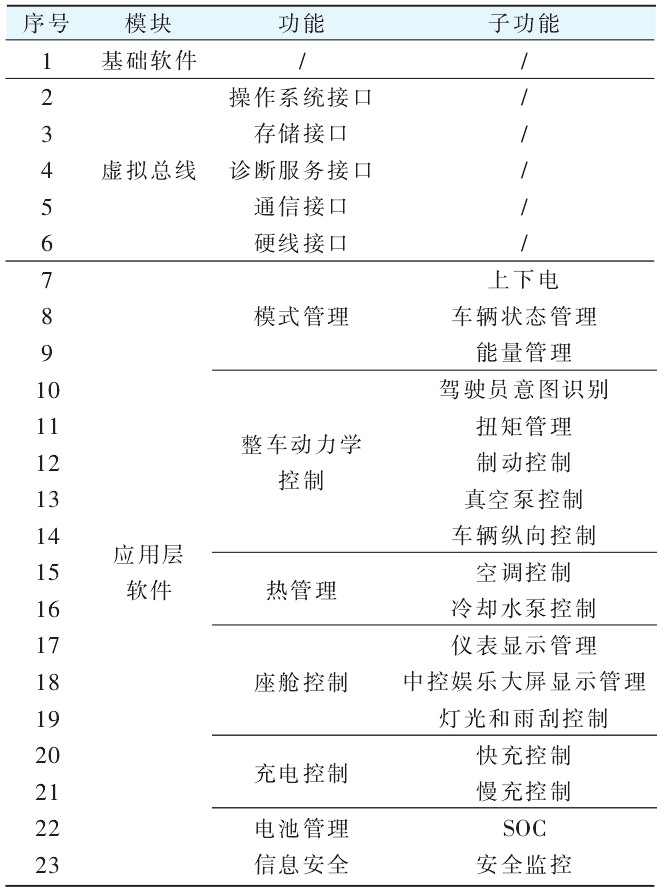
更全面的動力域控制器的功能集如下圖所示。
在軟件層級功能劃分所示,分為基礎軟件和應用層功能,基礎包括常見的診斷、存儲、通信、OS接口,應用層就豐富了,包括模式管理、熱管理、動力控制、SOC估算等等。
那動力域的的性能目標是啥呢?包括安全等級,車輛動力縱向控制器、能量估算精度、通信精度等,如下表所示。
| 項目 | 目標值 |
| 安全 | 符合功能安全ASIL C |
| 動力縱向控制精度 | 轉速波動小于40(r/min)/30ms |
| 能量估算精度 | <5% |
| 通信 | 最小周期10ms,精度±2% |
| 密封 | IP67 |
| 電磁兼容 | 滿足法規要求 |
| 耐溫性 | -40~110℃ |
最后在動力域控制器開發完成后,需要做哪些測試呢?這里包括兩部分,一部分是臺架的,一部分是整車的,整車有包括性能試驗和可靠性試驗。 首先是臺架測試如下表所示。
| 試驗項目 | 檢測依據 | |
| 機械性能試驗 | 振動試驗 | 控制器固定在振動臺架上 ,試 驗中通電,分別進行 X、Y、Z三個方向的振動,每個方向8h。掃頻范圍10~500Hz, 振幅10~25Hz,振幅 1.2mm;25~500Hz,加速度30m/s2,掃頻速率1oct/min |
| 防水性能試驗 | GB/T 4208—2017 | |
| 防塵試驗 | GB/T 4208—2017 | |
| 一般電氣性能試驗 | 電壓跌落試驗 | ISO 16750-2:2012 4.5.2 |
| 供電中斷恢復試驗 | ISO 16750-2:2012 4.6.2.2 | |
| 電源極性反接試驗 | ISO 16750-2:2012 4.7.2.3 | |
| 輸出負載短路試驗 | ISO 16750-2:2012 4.10.3.1 | |
| 環境適應性試驗 | 高溫工作試驗 | ISO 16750-4:2010 5.1.2.2.2 |
| 高溫循環試驗 |
ISO 16750-4:20105.2.2.2 溫度范圍-40~110℃ |
|
| 溫度沖擊試驗 | GB/T 2423.22—2002 | |
| 加速老化試驗 | GB/T 2423.50—2012 | |
| EMC性能試驗 | 電源線射頻傳導發射和輻射發射試驗 | CISPR 25:2016 |
| 射頻抗擾度試驗 |
ISO 11452-4:2011, ISO 11452-4:2019 |
|
| 瞬態抗干擾試驗 |
ISO 7637-2:2011, ISO 7637-2:2016 |
|
| 靜電放電抗擾度 | ISO 10605:2008 | |
| 功能安全評估 | ISO 26262 ASIL C |
整車性能試驗項如下表所示。
| 試驗項目 | ||
| 動力性 | 最高速度 | 30min最高車速(km/h) |
| 加速性能 | 0~50km/h加速時間/s | |
| 50~80km/h加速時間/s | ||
| 爬坡性 | 最大爬坡度/(5km/h)≥25 | |
| 車輛動力縱向控制精度 | 轉速波動小于40(r/min)/30ms | |
| 經濟性 | NEDC工況 | 續駛里程/km |
| 能量回收經濟性貢獻率 | ||
| SOC 估算誤差 | <5% |
整車可靠性測試項如下表所示。
| 試驗工況 | 標準要求 |
| 強化耐久路試驗里程/km | ≥10000km |
| 高速環道試驗/km | ≥20000km |
| 山路試驗/km | ≥5000km |
| 城市城郊試驗/km | ≥10000km |
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
114文章
16955瀏覽量
182773 -
比亞迪
+關注
關注
19文章
2438瀏覽量
55028 -
熱管理
+關注
關注
11文章
468瀏覽量
22269 -
DCDC
+關注
關注
29文章
865瀏覽量
72668
原文標題:動力域控制器功能,性能評價,測試項
文章出處:【微信號:eng2mot,微信公眾號:汽車ECU開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
域控制器的5個角色主機類型與作用
AD中5個角色主機類型與作用。架構主機,域命名主機 defult由林根域內的第一臺域控制器扮演而每一個域擁有自己的RID主機,PDC模擬主機和基礎結構主機這三個角色defult由該域內的第一臺域控制器扮演
發表于 07-15 07:15
【WBR3 WiFi&BLE 雙模模組免費試用申請】汽車動力域控制器
項目名稱:汽車動力域控制器試用計劃:汽車域控制器 Demo驗證,通過Wifi熱點或藍牙與手機APP通信,實現各核心部件的參數標定和實時采集。
發表于 08-11 13:56
【HarmonyOS HiSpark AI Camera】域控制器預言開發
項目名稱:域控制器預言開發試用計劃:1.基于開發板調試攝像頭輸入,顯示屏輸出鏈路,熟悉視頻流采集輸出。2.熟悉鴻蒙OS3.在公司的RCAR平臺上測試鴻蒙OS
發表于 11-23 15:06
車身域控制器的原理是什么呢
車身域控制器原理圖如下:這是一個頂燈輸出模塊域控制器的原理圖,電路的組成和是由控制芯片決定的,這里用到的是ST公司的VNL5050N3芯片,在
發表于 02-14 07:05
介紹汽車區域控制器的一些關鍵技術和MCU解決方案
的大腦,區域控制器中的MCU一般需要具備強大的處理能力,有很豐富的通訊接口,同時具備一定功能安全和信息安全等級。下面介紹區域控制器的一些關鍵技術和MCU解決方案。 高算力多核處理器
發表于 10-26 16:47
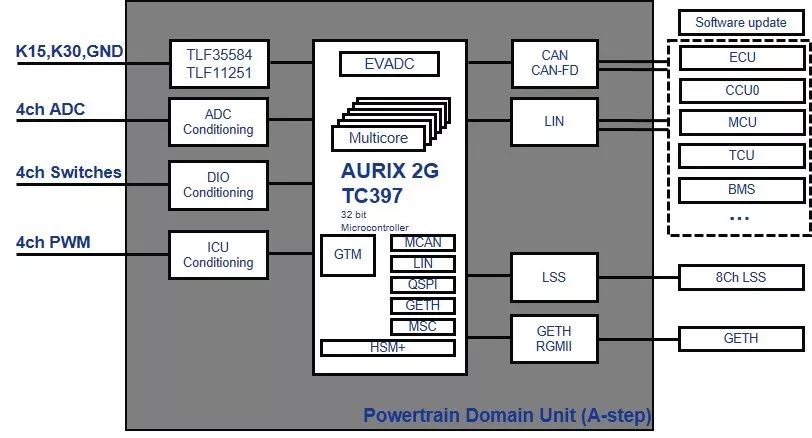
關于智能動力域控制器的應用前景分析和性能介紹
本方案是以Aurix 2G為核心的智能動力域控制器軟硬件平臺,對動力域內子控制器進行功能整合,集成ECU的基本
新能源汽車中車身域控制器自動化的測試方案
域控制器的測試特點和問題,意昂神州結合多年的測試平臺搭建經驗,提供通用可靠的車身域自動化測試系統。并基于意昂神州豐富的測試案例,提供高覆蓋率
發表于 07-23 15:00
?2609次閱讀

智能座艙域控制器功能自動化測試方案
北匯信息在智能座艙領域相關的部件、系統、實車的測試規范/用例開發、測試實施和測試系統搭建已有近十年的積累,可為智能座艙域控制器功能自動化

域控制器是什么 域控制器介紹
什么是域控制器? 域控制器的概念最早由以博世、大陸為首的Tier1提出,它的出現是為了解決信息安全以及ECU瓶頸的問題。域控制器因為有強大的硬件計算能力與豐富的軟件接口支持,使得更多核心功能
域控制器上AUTOSAR AP的優勢和挑戰
汽車E/E體系結構由分布式向集中式發展域控制器,部署AUTOSAR AP的優勢和挑戰域控制器、部署AUTOSAR AP的優勢和挑戰域控制器。
發表于 08-11 10:47
?691次閱讀






 工商網監
工商網監
評論