 無人機遙感監測作物病蟲害脅迫方法
無人機遙感監測作物病蟲害脅迫方法
目前,基于無人機的遙感監測(無人駕駛飛行器、遙感傳感器、遙測遙控、通訊、GPS差分定位、遙感應用等技術)技術已在作物病蟲害脅迫領域被廣泛應用與研究。當作物受到病蟲害脅迫時通常在不同光譜波段上表現出吸收和反射特性的變化,即為作物病蟲害脅迫的光譜響應。作物由于病蟲害脅迫受損會引起色素、形態、結構等改變,通常可以通過提取其光譜響應特征并加以分析處理,實現對病蟲害脅迫的精準、快速、無損監測。
一、概述
無人機遙感監測作物病蟲害脅迫是以無人機為遙感監測平臺,利用搭載的各種傳感器獲取目標作物的遙感影像、視頻、點云等數據,通過對數據的處理、挖掘和建模來獲取作物病蟲害脅迫信息。監測方法大致可分為兩類:①單一遙感監測方法,主要通過無人機搭載相應傳感器進行作物病蟲害脅迫數據獲取、處理及分析;②綜合遙感監測方法,主要利用無人機遙感監測技術與地面人工調查取樣等方式綜合進行作物病蟲害脅迫數據獲取、處理及分析。
根據實際監測情況的不同選擇單一或綜合無人機遙感監測作物病蟲害脅迫方法,以實現作物病蟲害信息的精準獲取和高效動態監測,為作物病蟲害科學防治提供支撐。其中,主要涉及以無人機飛行平臺和機載傳感器為代表的無人機遙感監測硬件系統,以無人機測繪攝影測量等專業處理軟件和數據處理分析相關算法或模型為代表的無人機遙感監測軟件系統。
二、監測數據獲取方式
1、無人機飛行平臺
無人機是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛行器。大致可分為多旋翼、固定翼、單旋翼(直升機)和混合翼(垂直起降固定翼)幾種。在使用無人機遙感監測作物病蟲害脅迫時,關注的重點是無人機載荷、續航時間、飛行高度、監測精度和空間分辨率等。如表1所示為不同的無人機飛行平臺。
由于遙感監測數據獲取過程中飛行平臺的選擇對獲取的數據質量有影響,因此選擇的飛行平臺應具備可操控性、高穩定性和飛行持久性等特點,以獲取質量較好的數據。目前,多旋翼無人機因具有航速姿態可調、飛行穩定、能夠定點懸停等優勢,適用于定點重復獲取多尺度、高分辨率的作物病蟲害脅迫數據,在遙感監測作物病蟲害脅迫研究與應用中最為廣泛。
2、機載傳感器
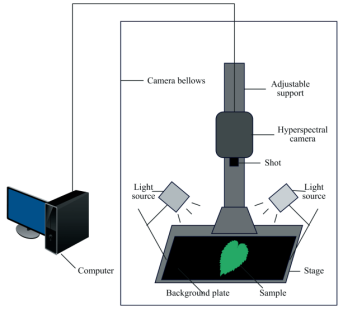
無人機遙感監測作物病蟲害脅迫研究中的機載傳感器類型主要包括多光譜相機、高光譜相機、數碼相機、熱紅外相機、激光雷達等。無人機遙感監測作物病蟲害脅迫的機載傳感器通常為光學、光電學和熱力學傳感器,少部分機載傳感器屬于聲學等領域。因此,利用無人機獲取病蟲害脅迫數據時,需要依據地域特征、病蟲害爆發程度和作物種類等情況選擇合適的傳感器。
3、數據獲取流程
無人機遙感監測作物病蟲害脅迫的數據獲取流程是保證每次飛行能正常操作且安全準確獲取監測數據的重要流程,無人機數據獲取的質量和數量對后續處理分析的結果有重要影響。對自主作業模式(全球定位系統模式,以實現精確懸停、指點飛行、規劃航線等操作)下無人機遙感監測作物病蟲害脅迫方法來說,主要有以下步驟:
(1)飛行前期準備。確認飛行任務區域及申請空域;查詢地理、天氣環境信息;選擇并調試飛行與地面設備(無人機飛行平臺、機載傳感器、遙控器、導航等)以及檢查電量、是否能正常工作等;是否攜帶其他設備,如輻射定標板等。
(2)正式飛行前準備。現場組裝、調試、連接飛行與地面設備;根據任務區域地形、作物病蟲害、續航、載荷等情況,設計飛行任務方案,如起降點、航線、高度、架次、重疊率等。
(3)飛行作業執行。實時關注無人機飛行平臺的速度、位置、電量、電壓、任務時間等飛行情況,監督飛行時穩定、安全作業,必要時可以手動接管飛行。
(4)飛行作業結束。自主返航或操控返航;返航完畢可關閉飛行與地面設備電源;回收飛行與地面設備,讀取儲存卡數據或在飛行作業時通過地面設備實時獲取遙感監測數據。
三、監測數據處理方法
如何從無人機遙感監測作物病蟲害脅迫獲取的大量數據中高效提取表型特征十分重要,并且很大程度決定處理分析的結果。表型特征主要包括光譜特征、紋理特征、顏色特征、形狀特征和生理特征等。目前,對這些表型特征的分析處理是無人機遙感監測作物病蟲害脅迫研究的熱點。現階段主流的無人機遙感監測作物病蟲害脅迫數據處理的方法可以大致分為統計分析方法和機器學習方法兩類。
目前,監測數據處理方法的流程主要為:遙感影像的格式調整、清洗、預處理、拼接、校正、特征提取、特征選擇、設計方法模型、評價指標與調優等。對于遙感影像格式調整一般使用機載傳感器配套軟件處理,對于遙感影像拼接和校正等則使用無人機測繪攝影測量軟件。
1、統計分析方法
在無人機遙感監測作物病蟲害脅迫相關研究中,常用描述統計、相關分析、回歸分析、判別分析、方差分析和聚類分析等統計分析方法。
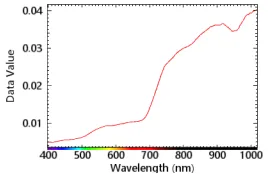
通常,借助上述方法使用植被的光譜特征進行作物病蟲害脅迫遙感監測。通過對光譜曲線進行分析,可以發現不同作物病蟲害脅迫的光譜曲線變化特征。一般基于特定光譜波段、波段計算與組合以及植被指數(Vegetation Index,VI)等方法進行光譜特征提取。因為不同病蟲害脅迫對作物生長造成的影響程度不一致,所以特定光譜波段更有利于對不同病蟲害脅迫進行監測。光譜波段經運算組合后可以得到反映植被生長狀況、植被覆蓋度等有相關意義的值,即VI。VI已廣泛用來定性和定量評價植被覆蓋及其生長活力,常用于作物病蟲害脅迫監測的VI主要由2~3個波段構成。
利用VI進行回歸或相關分析可以建立遙感監測數據與作物生長信息的反演模型,即經驗模型。由于經驗模型需要大量的實測數據為基礎,而實測數據的精度如何,很大程度取決于實測數據的測量精度;經驗模型存在區域適用性的限制,常常在實測數據采集的區域模型的適用性較高,在其他區域適用性較低;地表粗糙度的變化經驗模型無法考慮。目前,由于植被參數的遙感反演物理模型具有因果關系和數學物理基礎,因而正成為遙感反演作物病蟲害脅迫研究的主要方向,但主要集中在輻射傳輸模型,尚無幾何光學模型和混合模型等在作物病蟲害脅迫中研究與應用。
2、機器學習方法
當前,無人機遙感監測作物病蟲害脅迫的數據處理方法主要集中于機器學習方法。機器學習最基本的做法是使用算法來解析遙感監測數據,然后對真實世界中的病蟲害脅迫做出決策和預測。機器學習傳統的算法包括決策樹、聚類、貝葉斯分類、隨機森林、支持向量機、k-近鄰算法等。從學習方法上劃分,機器學習算法可以分為監督學習、無監督學習、半監督學習、集成學習、深度學習和強化學習等。
在機器學習傳統的算法中,如何最大限度地在數據中提取有用的特征以供算法和模型使用至關重要。當作物受到一定程度病蟲害脅迫后,患病蟲害的作物外部形態(葉面積、株高、顏色等)與內部生理均會發生較為明顯地改變。因此,除了使用無人機遙感監測獲取作物病蟲害脅迫影像的光譜特征之外,顏色特征(如顏色直方圖、顏色熵、顏色矩、顏色聚合向量等)、紋理特征(如局部二值模式、灰度直方圖、灰度共生矩陣、小波變換等)和形狀特征(如傅立葉變換、形狀不變矩、小波輪廓描述符等)等也常被提取使用。此外,還可以結合實地調查取樣獲取作物病蟲害脅迫下的株高、葉綠素含量、生物量和含水量等各項指標。特別地,作物受病蟲害脅迫的環境(溫度、濕度、海拔、土壤含水量、養分等)也會對病蟲害脅迫有影響,也是需要重點關注與開展長期性、周期性的研究。
近年來,隨著數據的高速增長、算力的迅猛增強、算法的完善成熟,深度學習逐漸在無人機遙感監測作物病蟲害脅迫領域得以大量應用。使用傳統的機器學習方法提取特征往往需要進行手工提取或特征工程,并且需要大量的時間優化,而深度學習減少人為設計特征的過程,將自動學習與任務相關的特征即特征學習融入建立模型的過程。
不過,使用深度學習方法面臨需要大量訓練數據和性能較高的計算機硬件支持,以及更優的模型等主要限制。盡管如此,相關研究表明使用深度學習方法比機器學習傳統的算法能獲得更好的分類、檢測、識別和分割性能,因此未來也需要不斷深入研究與改進。同時,隨著高光譜機載傳感器和深度學習技術的不斷發展,利用深度學習技術可以充分挖掘高光譜影像的潛在特征,實現更好地對各種作物病蟲害脅迫進行監測。
審核編輯 黃宇
-
光譜
+關注
關注
4文章
901瀏覽量
35900 -
遙感
+關注
關注
0文章
252瀏覽量
17092 -
無人機
+關注
關注
230文章
10725瀏覽量
185515
發布評論請先 登錄
災害監測怎么更快更準?高光譜無人機來支招!

“看”出植物生病、高溫干旱?高光譜無人機有一套!

高光譜相機:農業監測革命新利器!
如何利用遙感監測環境變化 遙感衛星的工作原理與種類
遙感影像分析的方法與步驟
正方科技歐荷智能電池在植保無人機上的應用
AI工具助力農民減輕作物損失
基于無人機高光譜影像的水稻分蘗數監測方法研究

基于無人機高光譜遙感的河湖水環境探測
基于無人機多光譜遙感的棉花生長參數和產量估算
基于無人機遙感的作物長勢監測研究進展

基于無人機高光譜遙感的荒漠化草原地物分類研究2.0
基于無人機高光譜遙感的荒漠化草原地物分類研究1.0
使用光譜技術檢測農作物病蟲害





 工商網監
工商網監
評論