") DeepMind全新AI項目曝光:可控制各類機器人,數(shù)據(jù)集有望開源
DeepMind全新AI項目曝光:可控制各類機器人,數(shù)據(jù)集有望開源

DeepMind 的新項目是什么?
開發(fā)機器人技術的一大挑戰(zhàn),就在于必須投入大量精力來為每臺機器人、每項任務和每種環(huán)境訓練機器學習模型。近日,谷歌 DeepMind 團隊及其他 33 個研究機構正共同發(fā)起新項目,旨在創(chuàng)建一套通用 AI 系統(tǒng)來應對這個挑戰(zhàn)。據(jù)稱該系統(tǒng)能夠與不同類型的物理機器人協(xié)同運作,成功執(zhí)行多種任務。
谷歌機器人部門高級軟件工程師 Pannag Sanketi 在采訪中表示,“我們觀察到,機器人在專項領域表現(xiàn)極佳,但在通用領域卻缺乏靈性。一般來講,大家需要為每項任務、每臺機器人和每種環(huán)境分別訓練一套模型,從零開始調整每一個變量。”
為了克服這個問題,讓機器人的訓練和部署變得更加輕松、快捷,谷歌 DeepMind 在名為 Open X-Embodiment 的大型共享數(shù)據(jù)庫項目中引入了兩大關鍵組件:一套包含了 22 種機器人類型數(shù)據(jù)的數(shù)據(jù)集,外加一系列能夠跨多種任務進行技能遷移的模型 RT-1-X(這是一個源自 RT-1 的機器人變壓器模型)。為了開發(fā) Open X-Embodiment 數(shù)據(jù)集,研發(fā)人員在超過 100 萬個場景中展示了 500 多種技能和 150,000 項任務,因此,該數(shù)據(jù)集也是同類中最全面的機器人數(shù)據(jù)集。
此外,研究人員還在機器人實驗室和不同類型的物理裝置之上對模型進行了測試,并發(fā)現(xiàn)與傳統(tǒng)機器人訓練方法相比,新方案確實能取得更好的成績。

來自 Open X-Embodiment 數(shù)據(jù)集的樣本展示了 500 多種技能和 150,000 項任務。
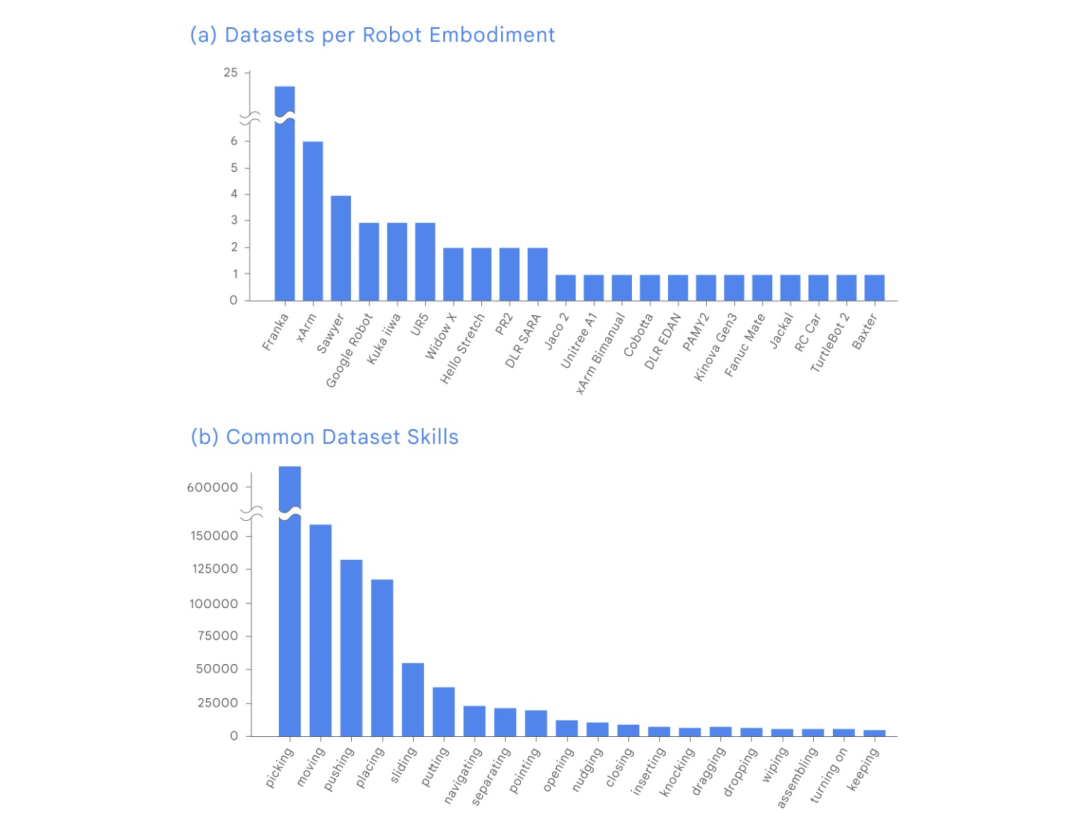
Open X-Embodiment 數(shù)據(jù)集結合了跨實施例、數(shù)據(jù)集和技能的數(shù)據(jù)。
結合機器人數(shù)據(jù)
通常來講,不同類型的機器人往往擁有獨特的傳感器和執(zhí)行器,所以需要配合專門的軟件模型。這就類似于不同生物體的大腦和神經(jīng)系統(tǒng)需要專門進化,從而適應該生物的身體結構與所處環(huán)境。
但 Open X-Embodiment 的誕生卻出于這樣一條先驗性的假設:將來自不同機器人和任務的數(shù)據(jù)結合起來,就能創(chuàng)建一套優(yōu)于專用模型的通用模型,足以驅動所有類型的機器人。這個概念在一定程度上受到大語言模型(LLM)的啟發(fā),即在使用大型通用數(shù)據(jù)集進行訓練時,模型成果的匹配度甚至可以優(yōu)于在特定數(shù)據(jù)集上訓練的小型針對性模型。而研究人員驚喜地發(fā)現(xiàn),此項原理果然也適用于機器人領域。
為了創(chuàng)建 Open X-Embodiment 數(shù)據(jù)集,研究團隊收集了來自不同國家 20 個機構的 22 臺機器人具身的真實數(shù)據(jù)。該數(shù)據(jù)集包含超 100 萬種情節(jié)(所謂情節(jié),是指機器人每次嘗試執(zhí)行任務時所采取的一系列動作),其中具體涉及 500 多種技能和 15 萬個任務示例。
隨附的各模型均基于 Transformer,一套在大語言模型中也得以應用的深度學習架構。RT-1-X 建立在 Robotics Transformer 1(簡稱 RT-1)之上,是一套適用于在真實環(huán)境下實現(xiàn)機器人技術規(guī)模化的多任務模型。RT-2-X 則建立在 RT-1 后繼者 RT-2 的基礎之上——RT-2 是一種視覺語言動作(VLA)模型,能夠從機器人和網(wǎng)絡數(shù)據(jù)中學習,并具備響應自然語言命令的能力。
研究人員在五所不同研究實驗室的五臺常用機器人上測試了 RT-1-X 對各類任務的執(zhí)行能力。與針對這些機器人開發(fā)的專用模型相比,RT-1-X 在拾取和移動物體、以及開門等任務上的成功率高出 50%。該模型還能將技能遷移至多種不同環(huán)境,這也是在特定視覺場景下訓練出的專用模型所做不到的。由此可見,由不同示例集訓練而成的模型在大多數(shù)任務中都優(yōu)于專用模型。論文還提到,此模型適用于從機械手臂到四足動物在內(nèi)的多種機器人。
加州大學伯克利分校副教授、論文聯(lián)合作者 Sergey Levine 寫道,“對于任何曾有機器人研究經(jīng)驗的朋友來說,都能意識到這是多么了不起:這類模型「從來」就沒能第一次就嘗試成功,但這個模型卻做到了。”
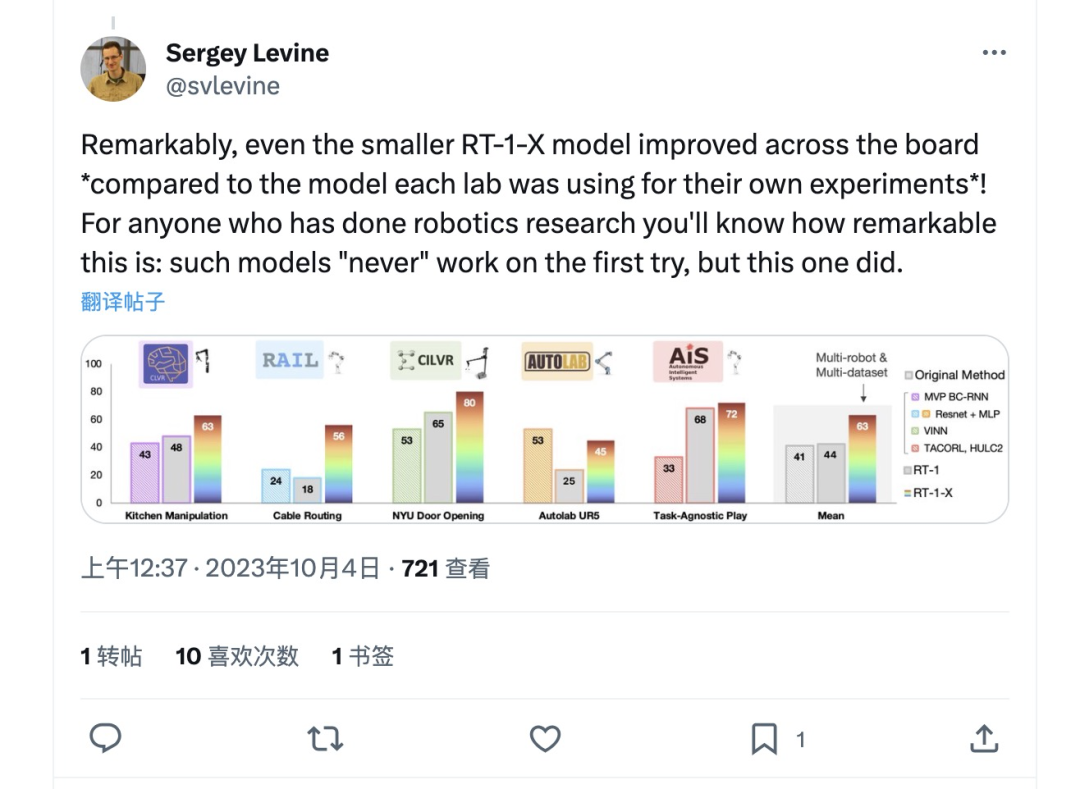
值得注意的是,即使是規(guī)模較小的 RT-1-X 模型,也實現(xiàn)了對各實驗室內(nèi)部專用模型的超越!對于任何曾有機器人研究經(jīng)驗的朋友來說,都能意識到這是多么了不起:這類模型“從來”就沒能第一次就嘗試成功,但這個模型卻做到了。
在應急技能和處理訓練數(shù)據(jù)集中未涉及的新任務方面,RT-2-X 的成功率可達 RT-2 的 3 倍。具體來講,RT-2-X 在需要空間認知的任務上表現(xiàn)出更好的性能,例如理解“將蘋果放到布旁邊”和“將蘋果放到布上”兩種要求間的區(qū)別。
研究人員在 Open X 和 RT-X 的發(fā)布博文中寫道,“我們的結果表明,與其他平臺的數(shù)據(jù)進行聯(lián)合訓練之后,RT-2-X 獲得了原始數(shù)據(jù)集中并不具備的額外技能,使其能夠執(zhí)行前所未見的新任務。”
步步邁向機器人研究的新未來
展望未來,科學家們正在考慮將這些進展與 DeepMind 開發(fā)的自我改進模型 RoboCat 的見解相結合,希望探索出新的研究方向。RoboCat 能夠學會在不同機械臂上執(zhí)行各種任務,然后自動設計出新的訓練數(shù)據(jù)以提高自身性能。
Sanketi 認為,另一個潛在的研究方向,也可能是進一步研究不同數(shù)據(jù)集間的混合會如何影響跨機器人具身的能力泛化與改進效果。
該團隊目前已經(jīng)開源了 Open X-Embodiment 數(shù)據(jù)集和小型 RT-1-X 模型,但并未公開 RT-2-X 模型。
Sanketi 總結道,“我們相信,這些工具將改變機器人的訓練方式,并加速該領域的研究進展。我們希望開源相關數(shù)據(jù),并提供安全但受限的模型以減少障礙、加速研究。機器人技術的未來離不開機器人之間的相互學習,而這一切的前提,首先要求研究人員之間能夠相互學習。”
-
機器人
+關注
關注
213文章
29706瀏覽量
212663 -
AI
+關注
關注
88文章
35041瀏覽量
279055 -
數(shù)據(jù)集
+關注
關注
4文章
1223瀏覽量
25415 -
DeepMind
+關注
關注
0文章
131瀏覽量
11554
原文標題:DeepMind 全新 AI 項目曝光:可控制各類機器人,數(shù)據(jù)集有望開源
文章出處:【微信號:AI前線,微信公眾號:AI前線】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
盤點#機器人開發(fā)平臺
自制一個支持AI 控制的無刷平衡車機器人:開源項目D-BOT全攻略
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產(chǎn)品
NVIDIA推出開源物理AI數(shù)據(jù)集
NVIDIA 發(fā)布全球首個開源人形機器人基礎模型 Isaac GR00T N1——并推出加速機器人開發(fā)的仿真框架






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論