") T-BOX與CAN通信介紹
T-BOX與CAN通信介紹
下圖是目前汽車(chē)內(nèi)的主流總線架構(gòu)形式(圖中每個(gè)框代表一個(gè)ECU)
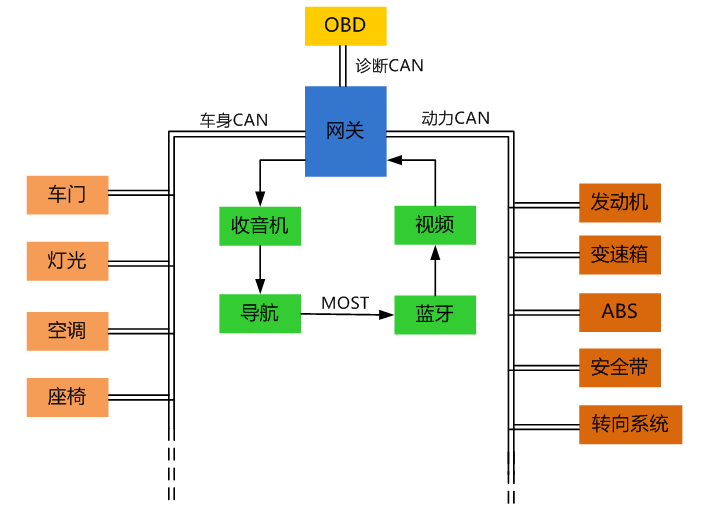
OBD: On-Board Diagnostic 車(chē)載診斷系統(tǒng)
MOST: Media Oriented System Transport 面向媒體的系統(tǒng)傳輸總線
CAN總線為了便于管理和控制,一般按功能需求進(jìn)行劃分,傳統(tǒng)汽車(chē)主要分動(dòng)力和車(chē)身兩大塊,車(chē)身總線采用低速,動(dòng)力采用高速。還留有一路專門(mén)做診斷的CAN連到車(chē)內(nèi)的OBD接口。另外,由于現(xiàn)在車(chē)內(nèi)導(dǎo)航、影音的需求太大,CAN總線沒(méi)辦法提供給視頻數(shù)據(jù)如此高的傳輸速率,所以在車(chē)載導(dǎo)航和娛樂(lè)系統(tǒng)中,一般采用速率可達(dá)22.5Mb/s 的MOST總線或其他類(lèi)似的高速總線。
不同總線網(wǎng)絡(luò)之間通信,全部依靠網(wǎng)關(guān)轉(zhuǎn)發(fā)報(bào)文。因此,網(wǎng)關(guān)也基本是車(chē)內(nèi)總線中最重要的部件,重要性就相當(dāng)于人體的脊椎。各廠商的架構(gòu)根據(jù)其需求會(huì)略有不同,但總體上都是這種模式。
如果要實(shí)現(xiàn)車(chē)聯(lián)網(wǎng),即車(chē)與網(wǎng)聯(lián)動(dòng)。在CAN總線為主導(dǎo)的今天,勢(shì)必要將具有聯(lián)網(wǎng)功能的模塊加入到車(chē)內(nèi)CAN總線架構(gòu)中。在已經(jīng)實(shí)現(xiàn)第一階段技術(shù)的車(chē)聯(lián)網(wǎng)產(chǎn)品中,大概又有三種技術(shù)方案。
OBD盒子聯(lián)網(wǎng)
將可聯(lián)網(wǎng)的設(shè)備(OBD盒子)插入車(chē)輛的OBD診斷接口,通過(guò)診斷CAN讀取車(chē)輛的相關(guān)行駛信息。這種方案被很多互聯(lián)網(wǎng)企業(yè)采用,汽車(chē)廠商只有極少數(shù)采用。
優(yōu)點(diǎn):
無(wú)需改動(dòng)車(chē)內(nèi)的總線架構(gòu),無(wú)需汽車(chē)廠商的配合,即插即用。因?yàn)镺BD口是汽車(chē)強(qiáng)制必須留出來(lái)的,主要用作車(chē)輛檢測(cè)和后期的程序升級(jí)維護(hù)。
缺點(diǎn):
一般只能讀取車(chē)內(nèi)數(shù)據(jù),無(wú)法實(shí)現(xiàn)遠(yuǎn)程控制,功能有限。而且,只要車(chē)廠封掉汽車(chē)行駛時(shí)的診斷CAN通信,這種方式就沒(méi)用了。
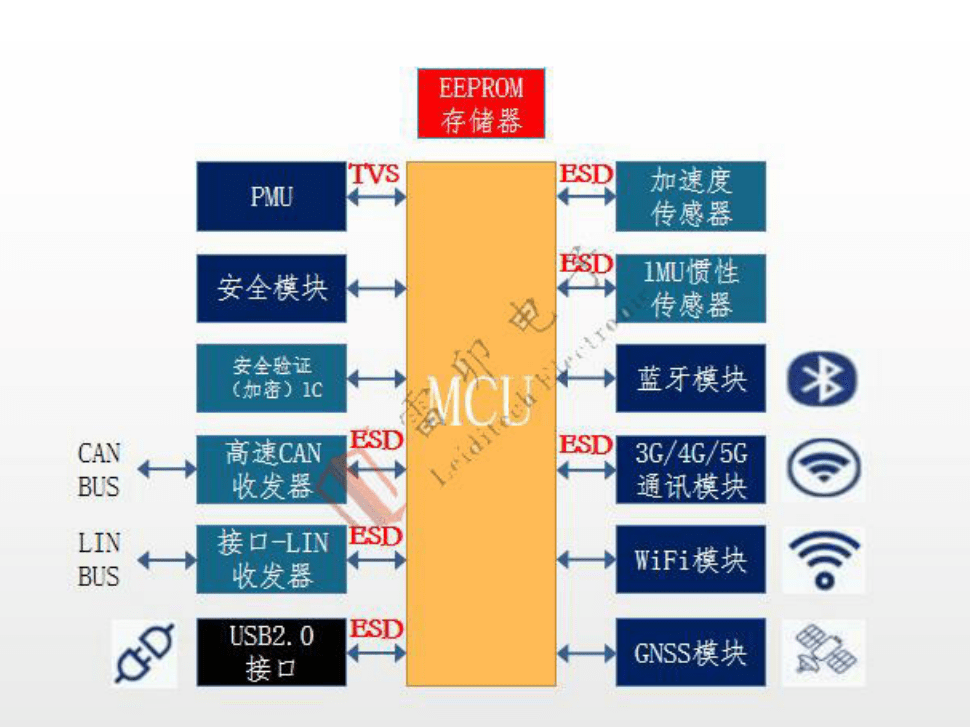
Telematics(無(wú)線通信車(chē)載系統(tǒng))直連CAN總線
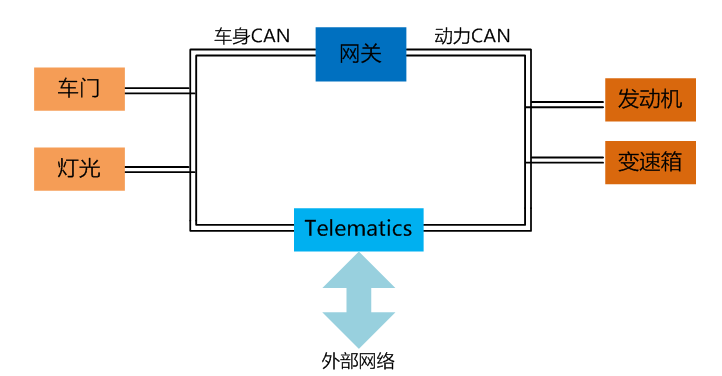
直接將具有遠(yuǎn)程通信功能的模塊接入CAN總線,通過(guò)telematics模塊讀取各ECU的信息,并發(fā)送相應(yīng)的控制信息,實(shí)現(xiàn)部分遠(yuǎn)程操控功能。
優(yōu)點(diǎn):
報(bào)文不需網(wǎng)關(guān)轉(zhuǎn)發(fā),信息傳遞直接有效,實(shí)現(xiàn)較為方便。
缺點(diǎn):
安全性不足,一旦telematics被攻擊,整車(chē)的CAN總線幾乎就暴露在黑客手中。
Telematics連在CAN外網(wǎng)絡(luò)
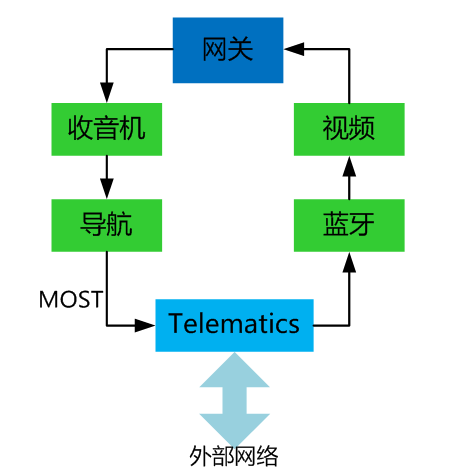
如圖例子,將telematics模塊加入MOST總線,直接與娛樂(lè)系統(tǒng)連接,并通過(guò)MOST網(wǎng)關(guān)轉(zhuǎn)發(fā)相應(yīng)的車(chē)輛信息和控制信息。
優(yōu)點(diǎn):
外部網(wǎng)絡(luò)與娛樂(lè)系統(tǒng)高度融合,便于實(shí)現(xiàn)車(chē)聯(lián)網(wǎng)娛樂(lè)和社交屬性;信息需要通過(guò)MOST網(wǎng)關(guān)轉(zhuǎn)發(fā),安全性較高。
缺點(diǎn):
MOST總線成本高,MOST網(wǎng)關(guān)開(kāi)發(fā)難度大。
結(jié)語(yǔ)
這三種技術(shù)方案雖然各有優(yōu)劣,但只要連入了CAN總線,在網(wǎng)關(guān)允許的情況下基本都能實(shí)現(xiàn)對(duì)車(chē)內(nèi)各ECU的訪問(wèn)和控制,不論是車(chē)身部分還是動(dòng)力部分。那為何我要將控制車(chē)身和控制動(dòng)力放在兩個(gè)不同的階段呢?這一點(diǎn)主要是考慮到安全性問(wèn)題,從技術(shù)角度看通過(guò)遠(yuǎn)程啟動(dòng)發(fā)動(dòng)機(jī)、控制轉(zhuǎn)向基本都沒(méi)有障礙,但現(xiàn)今眾多廠商極少有這么做的,大家忌憚的都是這安全性。
在智能輔助駕駛系統(tǒng)不成熟的情況下,將動(dòng)力部分開(kāi)放給車(chē)聯(lián)網(wǎng)并沒(méi)有什么明顯的優(yōu)勢(shì)和賣(mài)點(diǎn),現(xiàn)階段的消費(fèi)者不會(huì)因?yàn)槟隳苓h(yuǎn)程啟動(dòng)而多掏錢(qián)。但是如果智能輔助駕駛技術(shù)越來(lái)越成熟,甚至出現(xiàn)自動(dòng)駕駛,動(dòng)力部分豈有不放開(kāi)的理由,相應(yīng)的安全性問(wèn)題也會(huì)得到業(yè)界的重視。至于智能輔助駕駛系統(tǒng)何時(shí)才能成熟?好像還是繞不過(guò)CAN總線的瓶頸。
審核編輯:劉清
-
控制器
+關(guān)注
關(guān)注
114文章
16951瀏覽量
182754 -
CAN總線
+關(guān)注
關(guān)注
145文章
1972瀏覽量
132192 -
無(wú)線通信
+關(guān)注
關(guān)注
58文章
4703瀏覽量
144829 -
車(chē)聯(lián)網(wǎng)
+關(guān)注
關(guān)注
76文章
2636瀏覽量
92404 -
MOST
+關(guān)注
關(guān)注
2文章
33瀏覽量
18581
原文標(biāo)題:T-BOX與CAN通信
文章出處:【微信號(hào):談思實(shí)驗(yàn)室,微信公眾號(hào):談思實(shí)驗(yàn)室】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
招聘4G T-BOX車(chē)載智能設(shè)備軟硬件開(kāi)發(fā)工程師
關(guān)于T-BOX的NAD模塊中的參數(shù)含義
RJMU401在車(chē)載T-BOX中國(guó)密算法的流程是怎樣的
T-BOX系統(tǒng)解決方案深度剖析之接口
T-BOX系統(tǒng)解決方案深度剖析之電源軌
基于NEOWAY技術(shù)的T-Box解決方案

細(xì)數(shù)T-BOX中TI的明星產(chǎn)品之CAN 收發(fā)器 | 第二節(jié) TCAN1042-Q1:“硬核”的CAN收發(fā)器

車(chē)載T-BOX中MCU和SoC通信方案(SPI通信方式)
汽車(chē)T-Box方案概述
工程車(chē)輛T-Box硬件方案定制

T-BOX與通信終端市場(chǎng)研究分析

車(chē)載T-Box邏輯功能測(cè)試方案

車(chē)載T-Box通信穩(wěn)定性弱網(wǎng)測(cè)試方案
東軟T-BOX連續(xù)三年蟬聯(lián)雙榜第一
基于obd/t-box的車(chē)聯(lián)網(wǎng)系統(tǒng)設(shè)計(jì)與應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論