 PID剛入門?新手必看的15個PID基本概念!
PID剛入門?新手必看的15個PID基本概念!
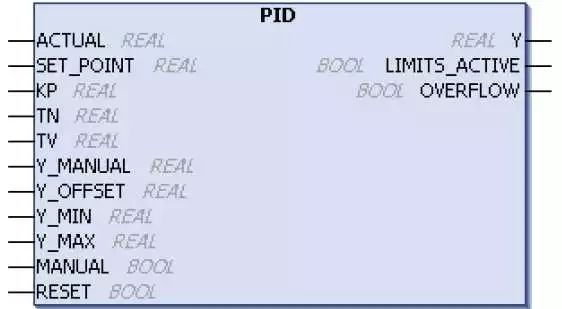
PID調節系統PID功能由PID調節器或DCS系統內部功能程序模塊實現,了解與PID調節相關的一些基本概念,有助于PID入門新手快速熟悉調節器應用,在自動調節系統中成功整定PID參數。
本文介紹必須熟透于心的15個PID基本概念。
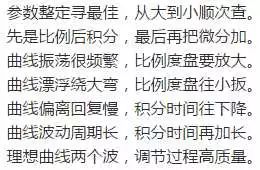
先讀一首PID打油詩

1、被調量
被調量就是反映被調對象的實際波動的量值。被調量是經常變化的。
2、設定值
PID調節器設定值就是人們期待被調量需要達到的值。設定值可以是固定的,也可以是變化的。
3、控制輸出
控制輸出指PID調節器根據被調量的變化情況運算之后發出的讓外部執行結構按照它的要求動作的指令。在PID調節器和執行機構之間還會有其他環節,比如限幅、伺服放大器等。限幅功能通常在PID調節器內完成;如果如果將PID、限幅和伺服放大器功能做在一臺儀表內就構成閥位控制PID調節器;將伺服放大器和限幅做在執行機構里就構成智能執行機構。
4、輸入偏差
輸入偏差時被調量和設定值之間的差值
5、P(比例)
P就是比例作用,簡單說就是輸入偏差乘以一個系數。
6、I(積分)
I就是積分,簡單說就是將輸入偏差進行積分運算。
7、D(微分)
D就是微分,簡單說就是將輸入偏差進行微分運算
8、PID基本公式
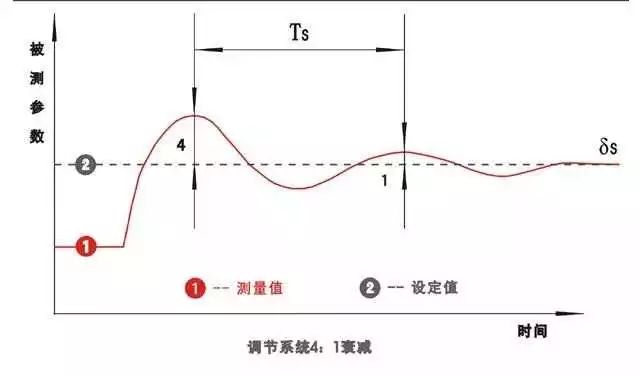
PID調節器參數整定過程通俗講就是先把系統調為純比例作用,逐步增強比例作用讓系統振蕩,記錄下比例作用和振蕩周期,然后這個比例作用乘以0.6,積分作用適當延長。
KP=0.6Km
KD=KP×π/4ω
KI=KP×ω/π
公式中KP為比例控制參數;KD為積分控制參數;KI為微分控制參數;Km為系統開始振蕩是的比例值;ω為極坐標下振蕩時的頻率
9、單回路
單回路就是只有一個PID的調節系統。
10、串級
一個PID不夠用,串級就是把兩個PID串接起來形成一個串級調節系統,也被成為雙回路調節系統。串級調節系統里PID調節器有主調和副調之分。
在串級調節系統中要調節被調量的PID叫做主調,輸出直接去指揮執行器動作的PID叫做副調,主調的控制輸出進入副調作為副調的設定值。主調選用單回路PID調節器,副調選用外給定調節器。
11、正作用
對于PID調節器而言,控制輸出隨被調量增高而增高,隨被調量減少而減少的作用,叫做PID正作用。
12、反作用
對于PID調節器而言,控制輸出隨被調量增高而降低,隨被調量減少而增高的作用,叫做PID反作用。
13、動態偏差
在調節過程中,被調量和設定值之間的偏差隨時改變,任意時刻兩者之間的偏差叫做動態偏差。
14、靜態偏差
調節趨于穩定之后,被調量和設定值之間還存在的偏差交靜態偏差。消除靜態偏差是通過PID調節器積分作用來實現的。
15、回調
調節器調節作用顯示,使被調量開始由上升變為下降,或者由下降變為上升趨勢成為回調。
部分內容來源于網絡,版權歸原作者所有。如涉及版權或對版權有所疑問,請第一時間與我們聯系,感謝。

加入粉絲交流群
張飛實戰電子為公眾號的各位粉絲,開通了專屬學習交流群,想要加群學習討論/領取文檔資料的同學都可以掃描圖中運營二維碼一鍵加入哦~
(廣告、同行勿入
原文標題:PID剛入門?新手必看的15個PID基本概念!
文章出處:【微信公眾號:張飛實戰電子】歡迎添加關注!文章轉載請注明出處。
-
模擬技術
+關注
關注
17文章
469瀏覽量
40195 -
張飛電子
+關注
關注
55文章
175瀏覽量
12962
原文標題:PID剛入門?新手必看的15個PID基本概念!
文章出處:【微信號:fcsde-sh,微信公眾號:fcsde-sh】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論