") 自動(dòng)駕駛操作域監(jiān)督是什么
自動(dòng)駕駛操作域監(jiān)督是什么
操作域監(jiān)督(ODS)
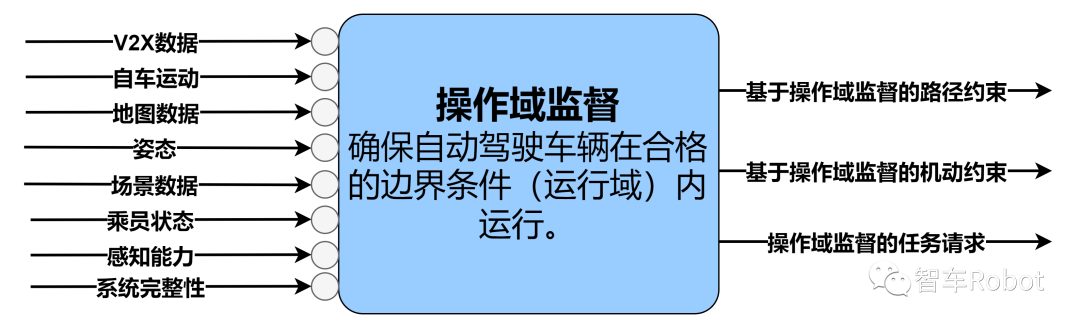
操作域監(jiān)督功能模塊圖
操作域監(jiān)督模塊監(jiān)控與動(dòng)態(tài)駕駛?cè)蝿?wù)相關(guān)的能力、狀態(tài)和情況,目的是確保自動(dòng)駕駛車(chē)輛在操作設(shè)計(jì)域及其他適用的動(dòng)態(tài)和靜態(tài)約束下運(yùn)行。它使用兩個(gè)操作域表示實(shí)現(xiàn)運(yùn)行時(shí)監(jiān)控:
?授權(quán)操作域表示設(shè)計(jì)意圖操作設(shè)計(jì)域和當(dāng)前適用狀態(tài)的并集,根據(jù)立法、驗(yàn)證和/或解決漏洞的行動(dòng),該域可能在系統(tǒng)生命周期中發(fā)展。
?當(dāng)前操作域表示上述基線域的有條件約束子集,由下述條件集修改。
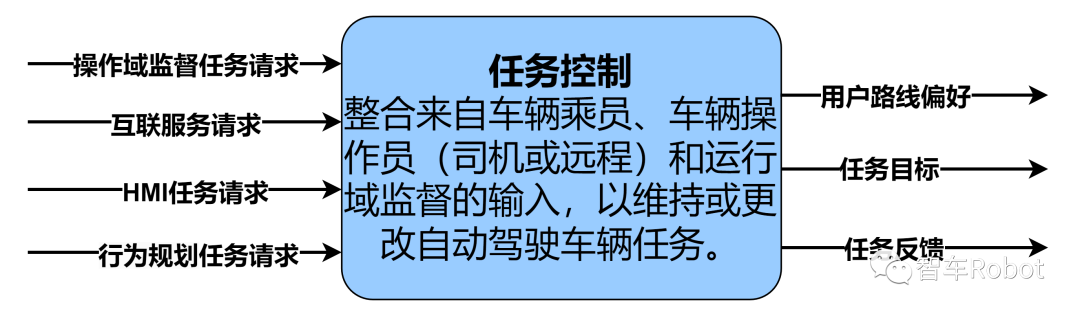
操作域監(jiān)督主要影響任務(wù)控制功能,但也指導(dǎo)路徑規(guī)劃和行為規(guī)劃。
一組主要條件指導(dǎo)操作域監(jiān)測(cè):
?機(jī)動(dòng)能力:通過(guò)對(duì)場(chǎng)景數(shù)據(jù)、自車(chē)運(yùn)動(dòng)和V2X輸入信號(hào)的解釋?zhuān)x自動(dòng)駕駛車(chē)輛的機(jī)動(dòng)包線。
?交通情況:提供當(dāng)前和未來(lái)位置的其他道路使用者信息。
?道路系統(tǒng)狀態(tài):包括道路表面、道路語(yǔ)義以及地理圍欄的動(dòng)態(tài)和靜態(tài)方面。
?駕駛員能力:評(píng)估駕駛員接管控制、自動(dòng)緊急行動(dòng)或其他任務(wù)改變的參與度。
?乘員狀態(tài):指示自動(dòng)駕駛車(chē)輛乘客狀態(tài),以終止或更改任務(wù)。
?感知能力:表示傳感器狀態(tài)、算法置信度和與感知相關(guān)的環(huán)境條件。
?系統(tǒng)完整性:包括傳感器、執(zhí)行器、支持系統(tǒng)和計(jì)算單元的技術(shù)狀態(tài),涵蓋功能安全、可靠性、可用性和安全角度。
操作域監(jiān)督信號(hào)輸入:
?V2X數(shù)據(jù):用于確定機(jī)動(dòng)能力、道路系統(tǒng)狀態(tài)和交通情況。
?自車(chē)運(yùn)動(dòng):用于確定機(jī)動(dòng)能力。
?地圖數(shù)據(jù):用于確定道路系統(tǒng)狀態(tài),并生成基于操作域監(jiān)督的路線約束。
?姿態(tài):用于確定道路系統(tǒng)狀態(tài)。
?場(chǎng)景數(shù)據(jù):用于確定機(jī)動(dòng)能力、道路系統(tǒng)狀態(tài)和交通情況。
?乘客狀態(tài):用于確定駕駛員能力和乘客狀況。
?感知能力:直接用作操作域監(jiān)控的一個(gè)主要條件。
?系統(tǒng)完整性:直接用作操作域監(jiān)控的一個(gè)主要條件。
操作域監(jiān)督信號(hào)輸出:
?基于操作域監(jiān)督的路徑約束:通過(guò)組合主要條件集與地圖數(shù)據(jù)生成路線約束,以確保當(dāng)前駕駛狀態(tài)的邊界得到維持。
?基于操作域監(jiān)督的機(jī)動(dòng)約束:通過(guò)組合主要條件集生成機(jī)動(dòng)約束,以確保在當(dāng)前和后續(xù)狀態(tài)及位置保證機(jī)動(dòng)性。這可以使車(chē)輛保持在當(dāng)前自動(dòng)駕駛?cè)蝿?wù)內(nèi),而不會(huì)超出操作設(shè)計(jì)域邊界條件。
?操作域監(jiān)督的任務(wù)請(qǐng)求:如果項(xiàng)目立即或未來(lái)將離開(kāi)操作域,則生成該請(qǐng)求以通過(guò)改變自動(dòng)駕駛?cè)蝿?wù)來(lái)解決此問(wèn)題,作為中期或短期策略來(lái)避免離開(kāi)操作域。該請(qǐng)求可能導(dǎo)致駕駛員狀態(tài)轉(zhuǎn)變,例如從自動(dòng)駕駛轉(zhuǎn)為手動(dòng)駕駛。
-
汽車(chē)電子
+關(guān)注
關(guān)注
3035文章
8243瀏覽量
169426 -
監(jiān)測(cè)
+關(guān)注
關(guān)注
2文章
3889瀏覽量
45325 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14193瀏覽量
169484
發(fā)布評(píng)論請(qǐng)先 登錄
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
汽車(chē)自動(dòng)駕駛技術(shù)
【話題】特斯拉首起自動(dòng)駕駛致命車(chē)禍,自動(dòng)駕駛的冬天來(lái)了?
自動(dòng)駕駛真的會(huì)來(lái)嗎?
細(xì)說(shuō)關(guān)于自動(dòng)駕駛那些事兒
自動(dòng)駕駛的到來(lái)
AI/自動(dòng)駕駛領(lǐng)域的巔峰會(huì)議—國(guó)際AI自動(dòng)駕駛高峰論壇
UWB主動(dòng)定位系統(tǒng)在自動(dòng)駕駛中的應(yīng)用實(shí)踐
如何讓自動(dòng)駕駛更加安全?
自動(dòng)駕駛汽車(chē)的處理能力怎么樣?
聯(lián)網(wǎng)安全接受度成自動(dòng)駕駛的關(guān)鍵
如何保證自動(dòng)駕駛的安全?
自動(dòng)駕駛系統(tǒng)設(shè)計(jì)及應(yīng)用的相關(guān)資料分享
自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)
自動(dòng)駕駛系統(tǒng)任務(wù)控制介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論