") 加速度計(jì)和陀螺儀的工作原理
加速度計(jì)和陀螺儀的工作原理

1.概述
橢球擬合是一種用于校準(zhǔn)加速度計(jì)傳感器的方法。該方法假設(shè)各軸之間相互直,加速度傳感器在靜止?fàn)顟B(tài)(只受重力的情況下),在三維空間中,各個(gè)姿態(tài)的x,y,z軸的重力點(diǎn)都在一個(gè)球面上。然而,由于各軸之間都會(huì)有偏差,所以各姿態(tài)重力點(diǎn)都落在一個(gè)橢球面上。橢球的中心即為加速度的偏移量,也就是校準(zhǔn)值。 橢球擬合的核心方法是最小二乘法。 最小二乘法,也稱為最小平方法,用于通過最小化殘差的平方和來找到一條最佳擬合直線或曲線,從而找到自變量和因變量之間的關(guān)系。目的是:用于找到一組參數(shù),使得模型的預(yù)測(cè)值與觀測(cè)值之間的平方誤差最小化。換句話說,它找到了最能代表變量之間關(guān)系的直線或曲線。它可以應(yīng)用于線性回歸、多項(xiàng)式回歸和其他類型的回歸分析。 而線性回歸是一種基于最小二乘法的統(tǒng)計(jì)方法,用于建立自變量和因變量之間的線性關(guān)系模型。
2.加速度計(jì)的工作原理[1]
在這里再簡(jiǎn)單的單獨(dú)介紹一下加速度的工作原理,前面也寫過一篇《MEMS 慣性傳感器 01-加速度計(jì)&陀螺儀工作原理》的博文詳細(xì)介紹了加速度計(jì)和陀螺儀的工作原理。 我們依據(jù)姿態(tài)傳感器的各軸的方向來想象有這樣一個(gè)立方體的盒子,盒子里裝有一個(gè)球。 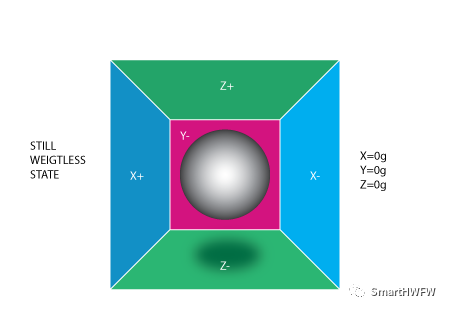
01
假設(shè)我們把這個(gè)盒子放進(jìn)太空(沒有重力場(chǎng)),此時(shí)處于靜止?fàn)顟B(tài),三個(gè)軸的加速值都為[0, 0, 0]g。 如果我們突然將盒子向左移動(dòng)(以加速度 1g = 9.8m/s^2 加速它),球?qū)⒆驳?X-。然后,我們測(cè)量球施加到 X- 的壓力,并在X軸上輸出[-1, 0, 0]g 的值。 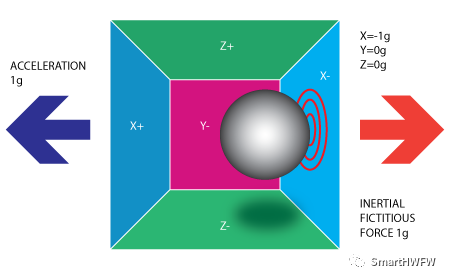 note:加速度計(jì)實(shí)際上將檢測(cè)到與加速度矢量方向相反的力。
note:加速度計(jì)實(shí)際上將檢測(cè)到與加速度矢量方向相反的力。
02
現(xiàn)在我們把立方體的盒子放在存在重力的地球上,Z 軸向上放在地球上,盒體內(nèi)的球受到地球重力的影響會(huì)落在 Z- 內(nèi)壁上,并在內(nèi)壁上施加 [0, 0, -1]g 的值。在這種情況下,盒子沒有移動(dòng),但我們?nèi)匀辉?Z 軸上得到 -1g 的讀數(shù)。球施加在內(nèi)壁上壓力是由重力引起的。 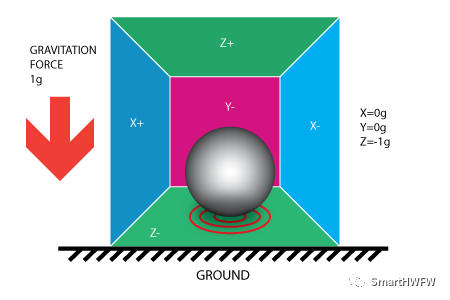
04
我們將盒子傾斜 45° 時(shí),球?qū)⒔佑| Z 和 X- 兩個(gè)面墻,將重力加速度正交分解,測(cè)得的X、Z軸的值為都為 [-g/√2, 0, -g/√2] 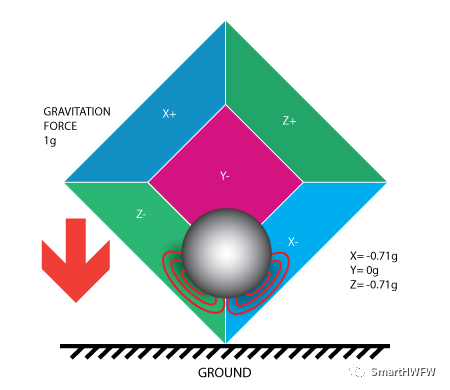
3.橢球擬合方法
01
橢球擬合算法描述 橢球擬合,可對(duì)多個(gè)位置(N)進(jìn)行測(cè)量,并可進(jìn)行組合以找到未知數(shù)(偏移、增益和交叉軸增益)。 和正六面體校準(zhǔn)相比,正立面體需要準(zhǔn)確的翻轉(zhuǎn)傳感器設(shè)備6次。 但是,對(duì)于橢球擬合,不需要知道傳感器的真實(shí)參考源,因?yàn)槲ㄒ坏囊笫钦鎸?shí)參考源的模數(shù)是常數(shù)(X、Y 和 Z 的平方和的平方根)。 對(duì)于加速度計(jì)的情況:要僅測(cè)量重力,傳感器不得有任何其他加速度;那么真實(shí)參考源的模數(shù)就是重力的模數(shù) 橢球擬合算法數(shù)學(xué)理論可以在網(wǎng)上找很多,我參考閱讀的是:橢圓/球擬合法推導(dǎo)(快速入門)這篇[2] https://blog.csdn.net/qq_39667840/article/details/106607279
02
橢球擬合流程 1)橢球面的標(biāo)準(zhǔn)方程為:  ?需要擬合的參數(shù)有六個(gè),他們分別是橢球的中心和半軸長 ? ?2)將標(biāo)準(zhǔn)方程寫成一般形式為:
?需要擬合的參數(shù)有六個(gè),他們分別是橢球的中心和半軸長 ? ?2)將標(biāo)準(zhǔn)方程寫成一般形式為:  通過對(duì)參數(shù)a、b、c、d、e、f的求解間接求出參數(shù) x0 、y0 、z0 、A、B、C ? ?3)建立誤差方程
通過對(duì)參數(shù)a、b、c、d、e、f的求解間接求出參數(shù) x0 、y0 、z0 、A、B、C ? ?3)建立誤差方程  ? ?4)改寫成目標(biāo)函數(shù)
? ?4)改寫成目標(biāo)函數(shù)  ? 5)根據(jù)線性最小二乘理論,求最優(yōu)解(即a,b,c,d,e,f)
? 5)根據(jù)線性最小二乘理論,求最優(yōu)解(即a,b,c,d,e,f)  其中
其中  ? ?
? ? ? 6)計(jì)算x0 、y0 、z0 、A、B、C
? 6)計(jì)算x0 、y0 、z0 、A、B、C  ? 7)校準(zhǔn)結(jié)果為:
? 7)校準(zhǔn)結(jié)果為: 
4.C語言實(shí)現(xiàn)橢球擬合
01
源碼
02
擬合計(jì)算出x0 、y0 、z0 、A、B、C 的值 ? 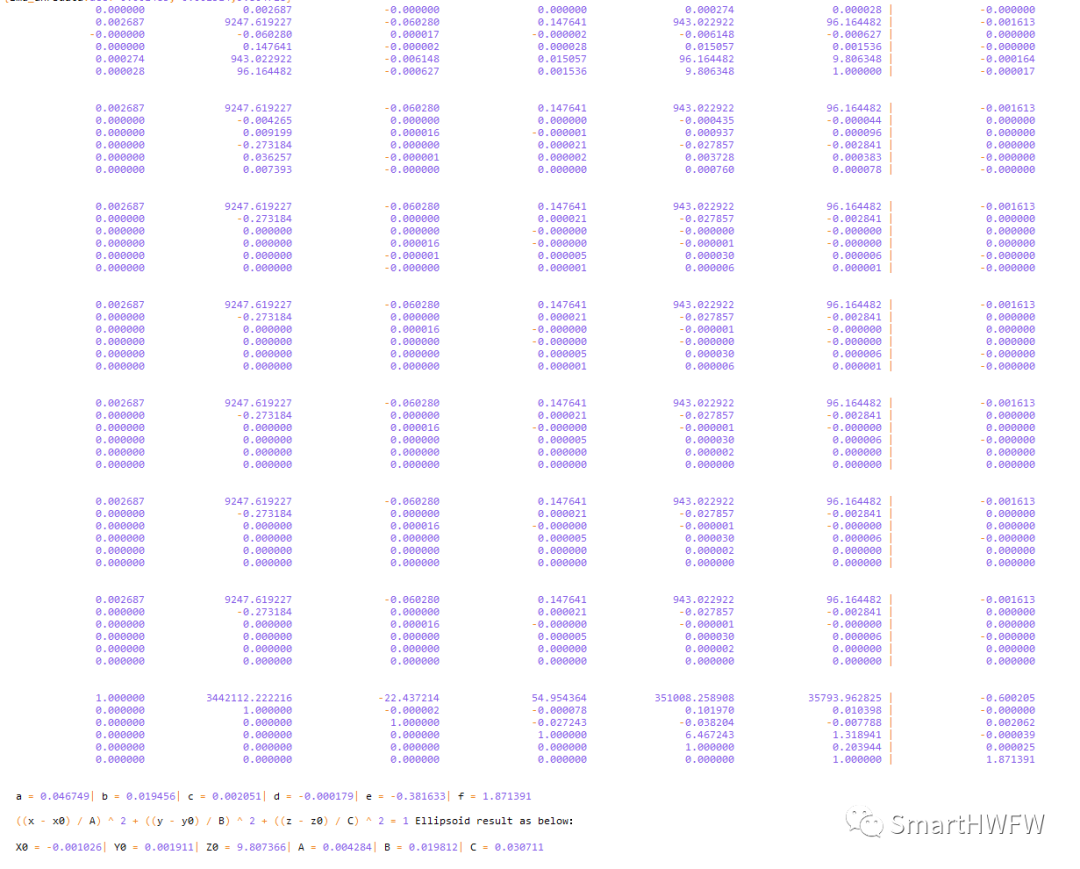
01
擬合加速度計(jì)的前/后數(shù)據(jù)對(duì)比 


4.橢球擬合校準(zhǔn)效果演示
-
陀螺儀
+關(guān)注
關(guān)注
44文章
846瀏覽量
99996 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
727瀏覽量
46830 -
模型
+關(guān)注
關(guān)注
1文章
3517瀏覽量
50391
原文標(biāo)題:MEMS_慣性傳感器15 - 加速度計(jì)校準(zhǔn)的橢球擬合方法(基于QMI8658 姿態(tài)傳感實(shí)現(xiàn)演示)
文章出處:【微信號(hào):SmartHWFW,微信公眾號(hào):SmartHWFW】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
陀螺儀LSM6DSOW開發(fā)(2)----上報(bào)匿名上位機(jī)實(shí)現(xiàn)可視化

關(guān)于陀螺儀和加速度計(jì)的選擇問題
請(qǐng)問為什么陀螺儀需校準(zhǔn)而加速度計(jì)不需?
介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法
介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法
基于MEMS的加速度計(jì)和陀螺儀設(shè)備是如何工作的
MEMS加速度計(jì)和陀螺儀的相位與頻率響應(yīng)
三分鐘了解慣性導(dǎo)航系統(tǒng)、加速度計(jì)、陀螺儀的工作原理
加速度計(jì)和陀螺儀的參數(shù)意義

MEMS加速度計(jì)和MEMS陀螺儀的區(qū)別
AN-688: iMEMS?加速度計(jì)和陀螺儀的相位與頻率響應(yīng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論