 【產品應用】AWorksLP 樣例詳解(MR6450)——UART
【產品應用】AWorksLP 樣例詳解(MR6450)——UART
AWorksLP 對外設進行了高度抽象化,為同一類外設提供了相同的接口,應用程序可以輕松跨平臺。本文以MR6450平臺為例,介紹AWorksLP UART 外設基本用法。
 ?簡介
?簡介
UART(Universal Asynchronous Receiver/Transmitter)是一種通用異步收發傳輸器,其使用串行的方式在雙機之間進行數據交換,實現全雙工通信。數據引腳僅包含用于接收數據的RXD和用于發送數據的TXD。數據在數據線上一位一位的串行傳輸,要正確解析這些數據,必須遵循UART協議,以下簡述幾個關鍵的概念:
- 波特率
波特率決定了數據傳輸速率,其表示每秒傳送數據的位數,值越大,數據通信的速率越高,數據傳輸得越快。常見的波特率有4800、9600、14400、19200、38400、115200等等,若波特率為115200,則表示每秒鐘可以傳輸115200位(注意:是bit,不是byte)數據。
- 空閑位
數據線上沒有數據傳輸時,數據線處于空閑狀態。空閑狀態的電平邏輯為“1”。
- 起始位起始位表示一幀數據傳輸的開始,起始位的電平邏輯是“0”。
數據位
- 緊接起始位后,即為實際通信傳輸的數據,數據的位數可以是5、6、7、8等,數據傳輸時,從最低位開始依次傳輸。
奇偶校驗位
- 奇偶校驗位用于接收方對數據進行校驗,及時發現由于通信故障等問題造成的錯誤數據。奇偶校驗位是可選的,可以不使用奇偶校驗位。奇偶校驗有奇校驗和偶校驗兩種形式,該位的邏輯電平與校驗方法和所有數據位中邏輯“1”的個數相關。
1. 奇校驗:通過設置該位的值(“1”或“0”),使該位和數據位中邏輯“1”的總個數為奇數。例如,數據位為8位,值為:10011001,“1”的個數為4個(偶數),則奇校驗時,為了使“1”的個數為奇數,就要設置奇偶校驗位的值為“1”,使“1”的總個數為5個(奇數)。
2. 偶校驗:通過設置該位的值(“1”或“0”),使該位和數據位中邏輯“1”的總個數為偶數。例如,數據位為8位,值為:10011001,“1”的個數為4個(偶數),則偶校驗時,為了使“1”的個數為偶數,就要設置奇偶校驗位的值為0,使“1”的個數保持不變,為4(偶數)。
通信雙方使用的校驗方法應該一致,接收方通過判斷“1”的個數是否為奇數(奇校驗)或偶數(偶校驗)來判定數據在通信過程中是否出錯。
停止位
- 停止位表示一幀數據的結束,其電平邏輯為“1”,其寬度可以是1位、1.5位、2位。即其持續的時間為位數乘以傳輸一位的時間(由波特率決定),例如,波特率為115200,則傳輸一位的時間為1/115200秒,約為8.68us。若停止位的寬度為1.5位,則表示停止位持續的時間為:1.5 × 8.68us ≈ 13us。
常見的幀格式為:1位起始位,8位數據位,無校驗,1位停止位。由于起始位的寬度恒為1位,不會變化,而數據位,校驗位和停止位都是可變的,因此,往往在描述串口通信協議時,都只是描述其波特率、數據位,校驗位和停止位,不再單獨說明起始位。
注意:
通信雙方必須使用完全相同的配置,包括波特率、起始位、數據位、停止位等。如果配置不一致,則通信數據會錯亂,不能正常通信。在通信中,若出現亂碼的情況,應該首先檢查通信雙方所使用的配置是否一致。
 ?接口介紹
?接口介紹
表1 函數列表
函數原型 | 簡要描述 |
aw_err_t aw_serial_flush_read (int fd); | 串口刷新讀取 |
aw_err_t aw_serial_dcb_set (int fd, const struct aw_serial_dcb *p_dcb); | 配置串口設備參數 |
aw_err_t aw_serial_dcb_get (int fd, struct aw_serial_dcb *p_dcb); | 獲取串口設備配置參數 |
aw_err_t aw_serial_timeout_set (int fd, struct aw_serial_timeout *p_cfg); | 配置超時參數 |
aw_err_t aw_serial_timeout_get (int fd, struct aw_serial_timeout *p_cfg); | 獲取超時參數 |
下表為UART接口相關結構體類型。表2 結構體類型表
類型 | 簡要描述 |
struct aw_serial_dcb | 串口配置結構描述 |
struct aw_serial_timeout | 串口超時設置 |
UART 配置信息說明:
1. aw_serial_dcb:
struct aw_serial_dcb { uint32_t baud_rate; uint32_t byte_size:4; uint32_t f_parity:1; uint32_t parity:1; uint32_t stop_bits:2; uint32_t f_ctsflow:1; uint32_t f_rtsctrl:2; uint32_t f_dsrsensitivity:1; uint32_t f_dsrflow:1; uint32_t f_dtrctrl:2; uint32_t f_outx:1; uint32_t f_inx:1; uint32_t f_fast_respond_recv:1; uint32_t f_dummy:14; uint16_t xon_lim; uint16_t xoff_lim; char xon_char; char xoff_char;};
成員詳解:
baud_rate:波特率;
byte_size:數據位寬度,范圍:[5:8];
f_parity:奇偶校驗,1:使能0:禁能;
parity:校驗方法;
表3 串口校驗方法取值表
宏定義 | 含義 |
AW_SERIAL_EVENPARITY | 偶效驗 |
AW_SERIAL_ODDPARITY | 奇效驗 |
- stop_bits:停止位數;
表4 串口停止位數取值表
宏定義 | 含義 |
AW_SERIAL_ONESTOPBIT | 1 位停止位 |
AW_SERIAL_ONE5STOPTS | 1.5 位停止位 |
AW_SERIAL_TWOSTOPBITS | 2 位停止位 |
AW_SERIAL_STOP_INVALID | 0 表示無效停止位 |
- f_ctsflow:監控CTS(clear-to-send)信號作輸出流控,1:CTS無效時數據發送被掛起,0:禁能;
- f_rtsctrl:設置RTS(request-to-send)流控;
表5 串口設備RTS(request-to-send)流控取值表
宏定義 | 含義 |
AW_SERIAL_RTS_HANDSHAKE | 硬件流控 |
AW_SERIAL_RTS_DISABLE | 軟件控制RTS無效 |
AW_SERIAL_RTS_ENABLE | 軟件控制RTS有效 |
AW_SERIAL_RTS_INVALID | 無效RTS |
- f_dsrsensitivity:設置dsr_sensitivity,1:對DSR信號敏感,除非DSR信號有效,否則將忽略所有接收的字節;
- f_dsrflow:是否監控DSR(data-set-ready信號來做輸出流控),1:若DSR無效時數據發送被掛起,直至DSR有效;
- f_dtrctrl:設置DTR(data-termial-ready)流控;
表6 串口設備DTR(data-terminal-ready)流控取值表
宏定義 | 含義 |
AW_SERIAL_DTR_HANDSHAKE | 硬件流控 |
AW_SERIAL_DTR_DISABLE | 軟件控制DTR無效 |
AW_SERIAL_DTR_ENABLE | 軟件控制DTR有效 |
AW_SERIAL_DTR_INVALID | 無效DTR |
- f_outx:XON/XOFF流量控制在發送時是否可用。1:當xoff值被收到時,發送停止;當xon值被收到時,發送繼續;
- f_inx:XON/XOFF流量控制在接收時是否可用。1:當接收緩沖區中空余容量小于xoff_lim字節時,發送xoff字符;當接收緩沖區中已有xon_lim字節的空余容量時,發送xon字符,占1位;
- f_fast_respond_recv:快速響應接收 1:使能0:禁能;
注解:
1.該配置項適用于接收時間敏感型應用,例如modbus;
2.該配置項實現通用的手段是將串口接收FIFO設置為1,當接收到一個數據后就產生接收中斷。對于沒有FIFO的串口來說,這個設置也許會被忽略。
f_dummy:保留位;
- xon_lim:在XON字符發送前接收緩沖區內空余容量的最小字節數;
- xoff_lim:在XOFF字符發送前接收緩沖區內空余容量的最大字節數;
- xon_char:指定XON字符;
- xoff_char:指定XOFF字符。
2. aw_serial_timeout:
struct aw_serial_timeout { uint32_t rd_timeout; uint32_t rd_interval_timeout;}
成員詳解:
rd_timeout:讀超時時間;
rd_interval_timeout:碼間超時。
?使用樣例
AWorksLP SDK相關使用請參考《AWorksLP SDK快速入門(MR6450)——開箱體驗》一文,本文不在贅述。
?1. UART0收發功能
{SDK}\demos\peripheral\ serial路徑下為通用UART例程,例程具體代碼如下:
#include "aworks.h"#include "aw_task.h"#include "aw_delay.h"#include "aw_serial.h"#include "aw_ioctl.h"#include "aw_fcntl.h"#include "aw_application_autoconf.h"#include "aw_unistd.h"#include "aw_vdebug.h"#include "rtk_autoconf.h"/** * \brief 串口 demo * \return 無 */aw_local void* __task_handle (void *parg){ char buf[32]; int len = 0; struct aw_serial_dcb dcb; aw_err_t ret; struct aw_serial_timeout timeout; int fd;
fd = aw_open(CONFIG_DEMO_SERIAL_DEVICE_NAME,AW_O_RDWR,0); if(fd < 0){ aw_kprintf("serial open failed\r\n"); aw_close(fd); return 0; }
/* 獲取dcb的默認配置 */ ret = aw_serial_dcb_get(fd, &dcb); if (AW_OK != ret) { aw_kprintf("serial get dcb failed: %d \r\n",ret); aw_close(fd); return 0; }
/* 配置串口波特率為115200,8個數據位,1位停止位,無奇偶校驗 */ dcb.baud_rate = 115200; dcb.byte_size = 8; dcb.stop_bits = AW_SERIAL_ONESTOPBIT; dcb.f_parity = AW_FALSE; ret = aw_serial_dcb_set(fd, &dcb); if (AW_OK != ret) { aw_kprintf("serial set dcb failed: %d \r\n",ret); aw_close(fd); return 0; }
/* 配置串口超時 */ ret = aw_serial_timeout_get(fd, &timeout); if (AW_OK != ret) { aw_kprintf("serial get timeout failed: %d \r\n",ret); aw_close(fd); return 0; }
timeout.rd_timeout = 1000; /* 讀總超時為1s */ timeout.rd_interval_timeout = 50; /* 碼間超時為50ms */ ret = aw_serial_timeout_set(fd, &timeout); if (AW_OK != ret) { aw_kprintf("serial set dcb failed: %d \r\n",ret); aw_close(fd); return 0; }
/* 收到什么數據就發送什么數據 */ AW_FOREVER { /* 讀取數據 */ memset(buf, 0, sizeof(buf)); len = aw_read(fd, buf, sizeof(buf)); if (len > 0) { aw_write(fd, buf, len); aw_kprintf("%s\r\n",buf); } }
aw_close(fd); return 0;}
AW_TASK_DECL(serial_tsk, 4096);/******************************************************************************/void demo_serial_int_entry (void){ aw_task_id_t tsk;
tsk = AW_TASK_INIT( serial_tsk, "Serial int demo", 12, 4096, __task_handle, (void *)NULL); if (tsk == NULL) { aw_kprintf("Serial int demo task create failed\r\n"); return; }
if (aw_task_startup(tsk) != AW_OK) { AW_TASK_TERMINATE(serial_tsk); }}
例程默認使用/dev/uart0對應開發板DUART絲印串口,其引腳位置如圖1所示:
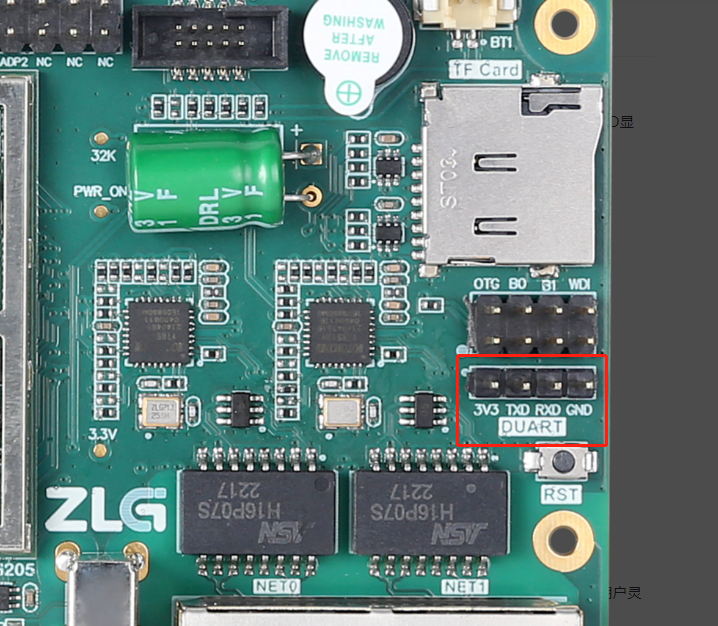
圖1UART0排針
上述代碼中創建了一個任務,在任務中實現UART收發功能。使用aw_serial_dcb_get接口獲取串口當前的配置信息,修改波特率為115200,8個數據位,1位停止位,無奇偶校驗。使用aw_serial_dcb_set接口設置串口。使用aw_serial_timeout_get獲取串口時間相關配置信息,修改讀總超時為1s,碼間超時為50ms,使用aw_serial_timeout_set設置串口。
在AW_FOREVER 循環中使用aw_read接口讀取接收到的串口數據,若讀取到數據則使用aw_write接口把讀取到數據通過該串口發送回去,以此來實現回顯功能。
但由于/dev/uart0默認為shell所使用的串口,在shell組件中已開啟回顯,故此時實驗現象如圖2所示,會將接收到的數據輸出兩次,若需實現單次回顯,可修改shell組件所引用串口,或修改例程使用的UART設備,具體操作參考下節內容。
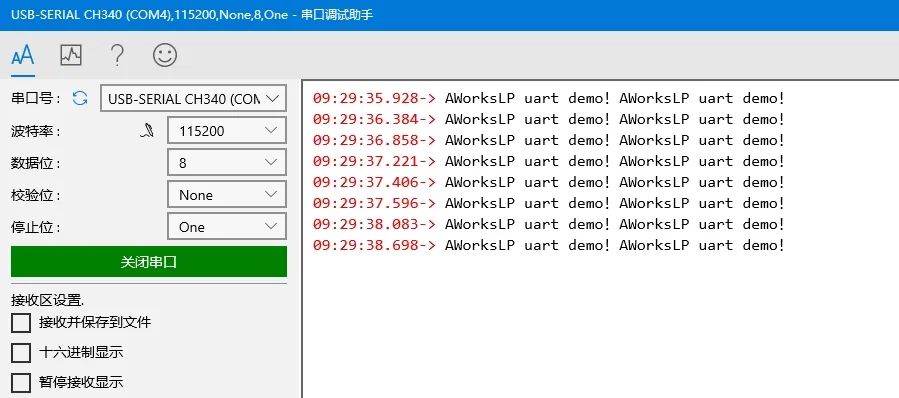
圖2串口打印結果
2. UART5收發功能
串口例程中默認使用的是/dev/uart0,為與例程現象描述一致,故將其修改為/dev/uart5。在開發板絲印URX1與UTX1對應設備/dev/uart5,URX2與UTX2對應設備為/dev/uart10,如圖3、圖4、圖5所示。
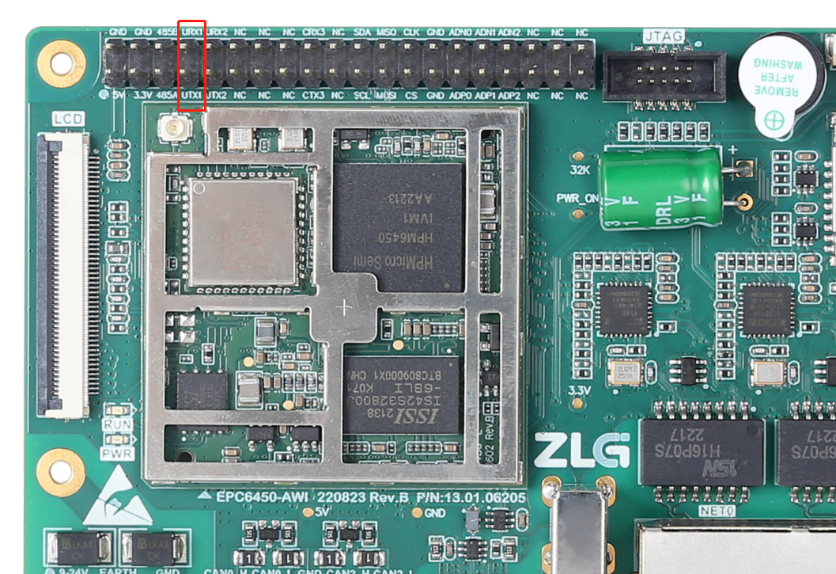
圖3排針處串口
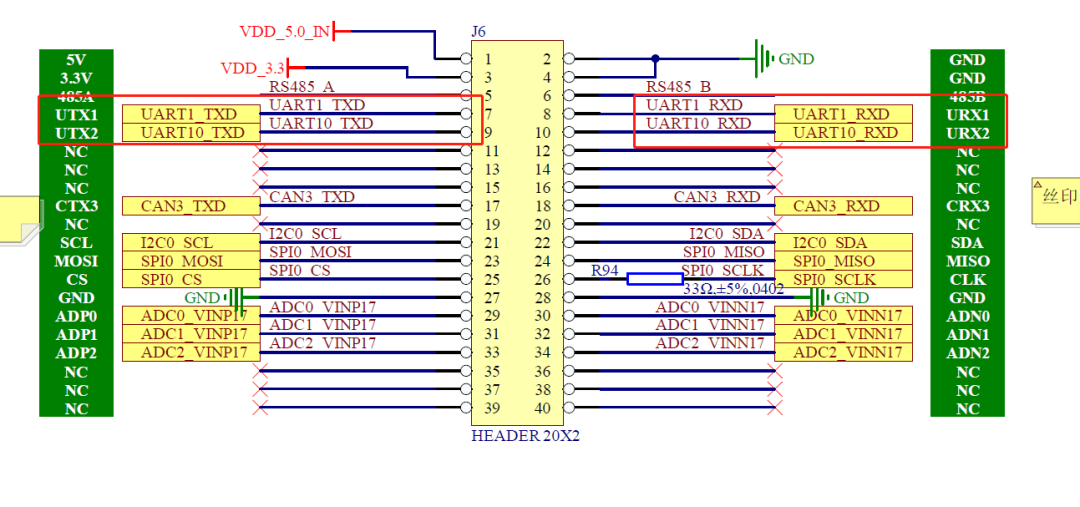
圖4排針原理圖
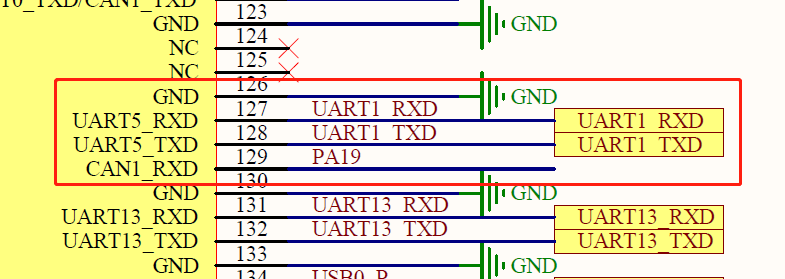
圖5UART1對應UART5
2.1 打開config 配置腳本,選擇例程使用串口為/dev/uart5, 如圖6所示,保存后重新build 工程。
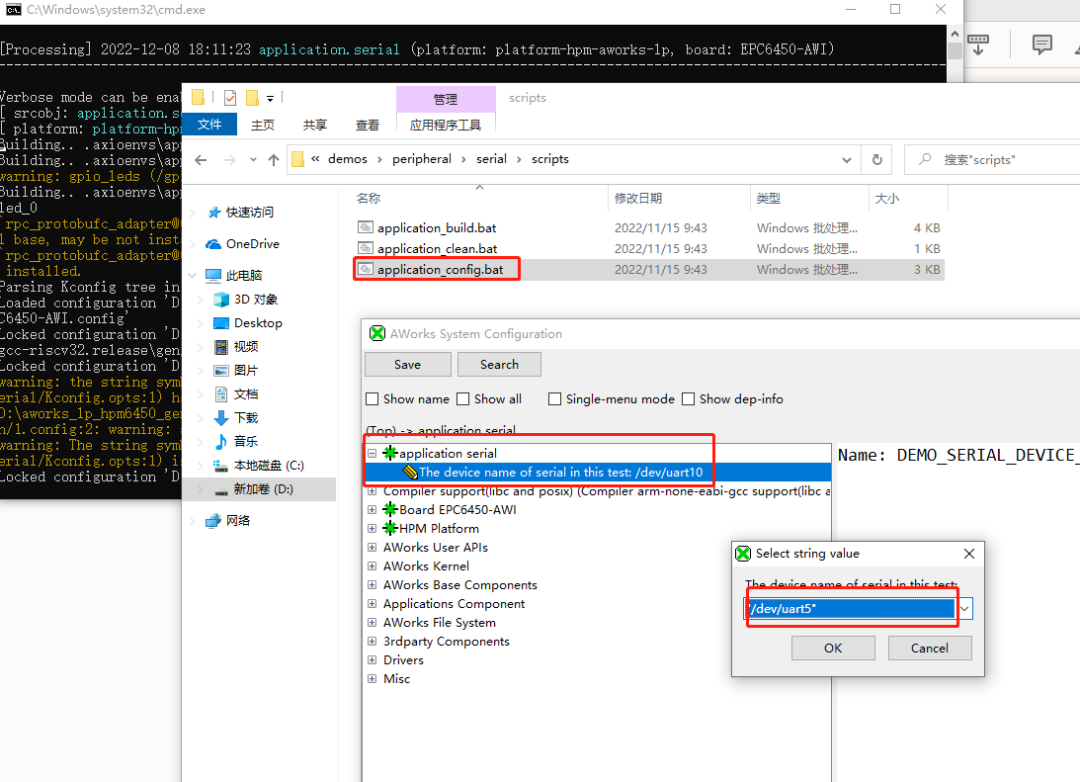
圖6UART1對應UART5
2.2 將USB 轉串口接到開發板排針絲印UTX1與URX1 的位置,重新編譯下載運行固件,會發現發送數據后不會再重復回復兩條相同的數據如圖7所示。
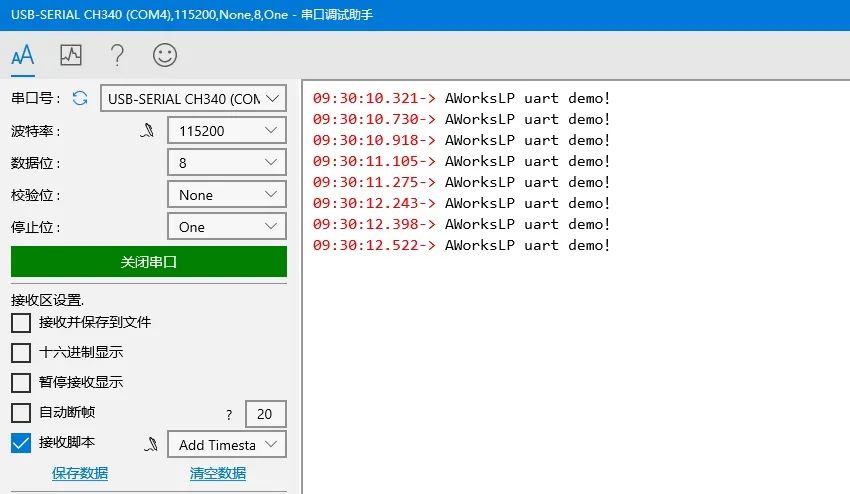
圖7串口打印信息
至此,UART設備的收發功能介紹完畢,更多外設的使用介紹請關注后續推文。
-
通信
+關注
關注
18文章
6177瀏覽量
137381 -
uart
+關注
關注
22文章
1268瀏覽量
103292
發布評論請先 登錄
基于瑞薩電子RA8T2 sensorless方案的樣例工程 可對電流環進行TCM化設置
全志科技機器人專用芯片MR527與MR813特性概述
RISC-V生態崛起:政策落地與高性能芯片的崛起

深度解析 | 基于HPM6450的RISC-V核心板究竟有哪些過人之處?

40mR/650V SiC 碳化硅MOSFET,替代30mR 超結MOSFET或者20-30mR的GaN!
深蕾半導體開發者中心上線多個AI Demo樣例

思必馳亮相2024全球人工智能產品應用博覽會
USB/UART橋接器的應用優勢

BTB擴展接口:LCD、Camera、UART、I2C等|詳解篇
為何ZLG致遠電子要推出LGA嵌入式核心板?





 工商網監
工商網監
評論