") 基于場景的V2X功能測試用例開發(fā)思考
基于場景的V2X功能測試用例開發(fā)思考
在《大話中國C-V2X通信標(biāo)準(zhǔn)應(yīng)用層標(biāo)準(zhǔn)》一文中,我們向大家介紹了CSAE在國內(nèi)推行的C-V2X應(yīng)用層標(biāo)準(zhǔn)。隨著國內(nèi)C-V2X標(biāo)準(zhǔn)的推動,一些量產(chǎn)車型也即將搭載V2X功能上市,V2X功能測試也成為了汽車電子測試中很重要的一個環(huán)節(jié)。相較于傳統(tǒng)的汽車ECU依賴總線仿真的測試,OBU的V2X測試加入了對測試場景的仿真。因此,如何構(gòu)建一個完善的覆蓋度高的測試用例,成為了測試的關(guān)鍵。
本文將以思維導(dǎo)圖的形式對場景進行分析,以表格的形式將測試用例呈現(xiàn),共同探討在場景中的V2X功能測試用例開發(fā)。
一、測試環(huán)境構(gòu)成分析
首先我們對OBU的通信環(huán)境進行分析:
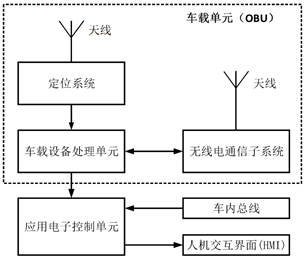
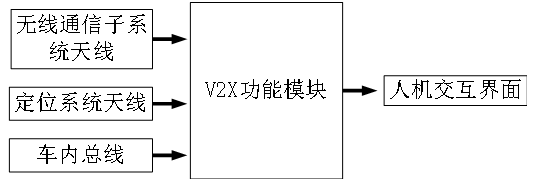
圖1.車用通信系統(tǒng)架構(gòu)示意圖
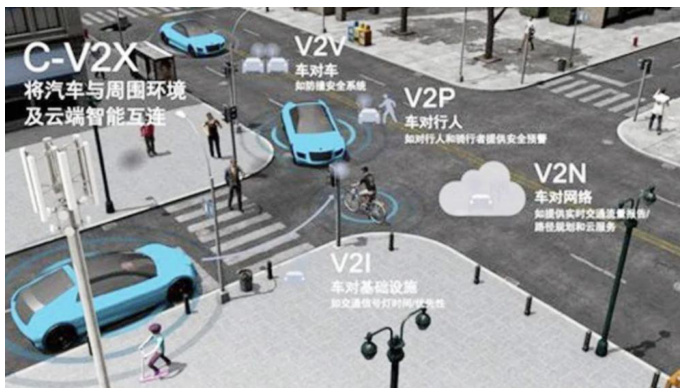
由圖1我們不難發(fā)現(xiàn),實現(xiàn)車輛V2X功能的通信對象主要有四種,分別是:
1)定位系統(tǒng)天線,用于接收GNSS信息,確定自車的定位;
2)無線電通信子系統(tǒng),用于向他車發(fā)送自車的相關(guān)狀態(tài);
3)車內(nèi)總線,向應(yīng)用電子控制單元推送車輛內(nèi)部的相關(guān)信息;
4)人機交互界面,應(yīng)用電子控制單元在對數(shù)據(jù)進行邏輯處理后向人機交互界面推送V2X信息,起到向駕駛員推動消息,發(fā)出報警的作用。
依據(jù)數(shù)據(jù)流向,我們可以將V2X功能測試拆分為自車向外發(fā)送狀態(tài)消息及自車接收消息對駕駛員進行消息推送及預(yù)計兩部分,如圖2所示:
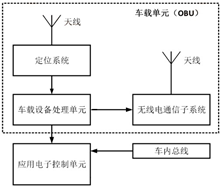
圖2.1車輛發(fā)送射頻消息通信構(gòu)架示意圖
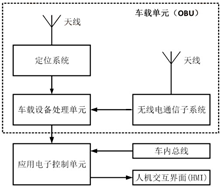
2.2車輛接收射頻消息通信構(gòu)架示意圖
綜合圖2.1、圖2.2我們可以發(fā)現(xiàn),在車輛發(fā)送射頻消息通信構(gòu)架示意圖中,定位系統(tǒng)與車內(nèi)總線是輸入端、無線電通信子系統(tǒng)天線是數(shù)據(jù)輸出端,車輛接收射頻消息通信構(gòu)架示意圖中,定位系統(tǒng)天線、無線電通信子系統(tǒng)天線、車內(nèi)總線、是數(shù)據(jù)輸入端,人機交互界面是數(shù)據(jù)輸出端,由此可以構(gòu)建數(shù)據(jù)流向圖,如圖3:
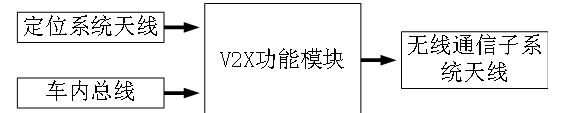
3.1車輛發(fā)送射頻消息通信數(shù)據(jù)流向示意圖
3.2車輛接收射頻消息通信數(shù)據(jù)流向示意圖
定位系統(tǒng)天線及無線通信子系統(tǒng)天線接收的消息與交通場景強相關(guān)。因此,本文主要對車輛接收射頻消息通信數(shù)據(jù)應(yīng)用場景進行討論。
依據(jù)通信網(wǎng)絡(luò)的來源屬性我們可以將V2X功能模塊的傳入數(shù)據(jù)分為車內(nèi)數(shù)據(jù)和車外數(shù)據(jù),車內(nèi)數(shù)據(jù)可分為車輛的狀態(tài)信息,如車速信息、車輛危險警示燈狀態(tài)、車輛擋位信息等;車輛車外數(shù)據(jù)可分為道路環(huán)境數(shù)據(jù)及交通參與者數(shù)據(jù),道路環(huán)境數(shù)據(jù)亦可分為動態(tài)道路環(huán)境及靜態(tài)道路環(huán)境,動態(tài)道路環(huán)境例如路側(cè)單元發(fā)出的紅綠燈數(shù)據(jù)(SPAT),道路事件及路側(cè)單元感知到的道路交通參與者信息(RSI)等;靜態(tài)道路環(huán)境,包括地圖數(shù)據(jù),車道標(biāo)牌等,交通參與者數(shù)據(jù),例如車輛發(fā)出的BSM消息,弱勢交通參與者(行人、非機動車)的基礎(chǔ)安全消息PSM等,如圖4所示:
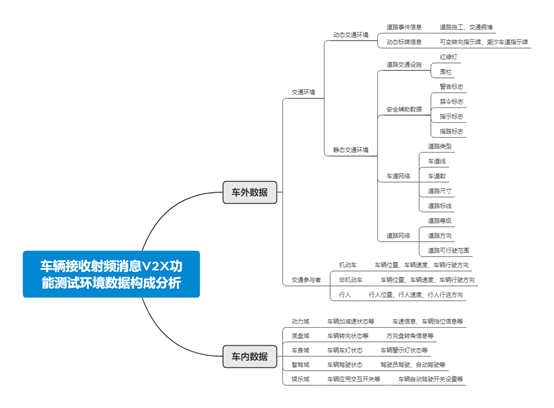
圖4車輛接收射頻消息V2X功能測試環(huán)境數(shù)據(jù)構(gòu)成分析。
二、測試用例開發(fā)
本文以CSAE 0157中車車協(xié)作式變道場景為需求,開發(fā)其對應(yīng)的測試用例。
CSAE 0157對車車協(xié)作式變道場景進行了如下描述。
車車協(xié)作式變道場景描述如下:
1)裝備有V2X通信設(shè)備的車輛EV-1、 EV-2在道路上正常行駛, EV-2在EV-1相鄰車道內(nèi)行駛。
2)EV-1和EV-2需具備無線通信能力。EV-1在行駛過程中需要進行變道時, EV-1將變道意圖發(fā)送給目標(biāo)車道的相關(guān)車輛EV-2。
3)EV-2收到EV-1的變道意圖,根據(jù)自身信息、周圍車輛信息或者其它車載傳感器感知的周邊環(huán)境信息,EV-2經(jīng)決策判斷,加速通過后EV-1變道或EV-2減速讓道。同時EV-2將其自身的駕駛行為調(diào)整即時發(fā)送給EV-1。
如圖6:
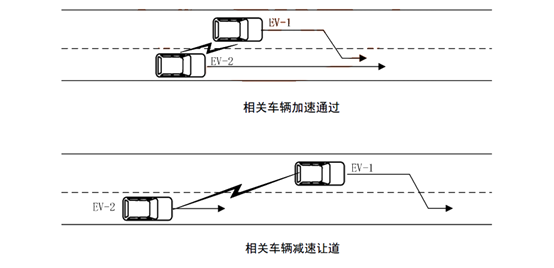
圖6車車協(xié)作式變道場景描述
在場景中,我們可認為:
1)EV-1,EV-2之間時距小于等于5秒時,EV-1的變道請求會使得EV-2進入邏輯判斷階段。
2)EV-1,EV-2在相鄰車道時,EV-1的變道請求會使得EV-2進入邏輯判斷階段。
3)EV-2車速小于EV-1,且EV-1與EV-2之間時距小于等于3秒時,EV-2向駕駛員發(fā)出預(yù)警,并提示減速;當(dāng)EV-2車速大于等于EV-1,EV-2向駕駛員發(fā)出預(yù)警,并提示加速通過,EV-1向駕駛員發(fā)出預(yù)警,并提示延遲變道。
4)EV-1完成變道或EV-2完成超車后預(yù)警退出。
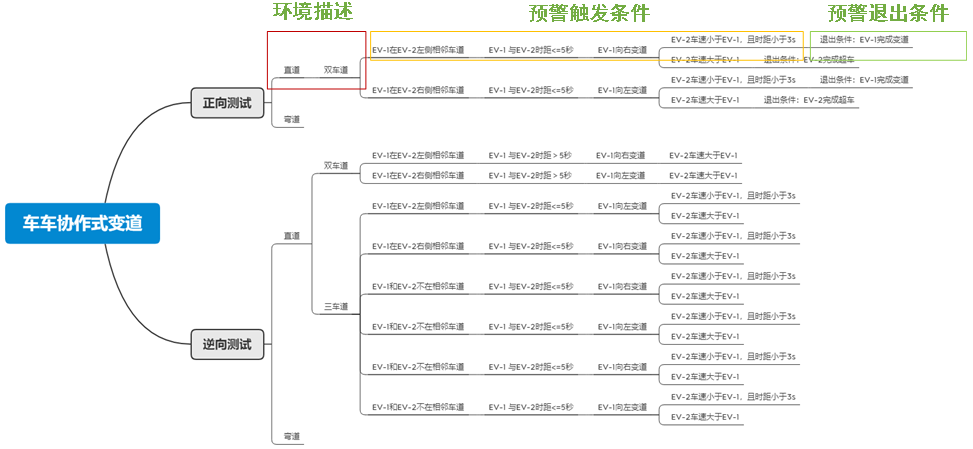
圖7協(xié)作式車車變道測試點示意圖
圖7所示的測試點由環(huán)境描述、預(yù)警觸發(fā)條件、預(yù)警退出條件三部分構(gòu)成,對每條測試用例的交通環(huán)境、預(yù)警功能觸發(fā)條件及預(yù)警功能退出條件進行了約束。
其后,我們對測試場景進行了搭建。
加速通過場景:
在加速通過場景中,“紅車(EV-1)”接近前車準(zhǔn)備變道后,“白車(EV-2)”加速行駛,讓出道路后“紅車(EV-1)”完成了變道。
減速讓道場景:
在減速通過場景中,“紅車(EV-1)”接近前車準(zhǔn)備變道后,“白車(EV-2)”通過減速讓行的方式讓“紅車(EV-1)”完成了變道。
三、總結(jié)
本文對基于V2X功能的測試用例開發(fā)進行了探討。北匯信息是IMT-2020(5G)推進組蜂窩車聯(lián)(C-V2X)工作組成員,我們致力于在C-V2X領(lǐng)域積極開展LTE-V2X和5G-V2X的測試驗證技術(shù)研究等工作,積極推動中國V2X的產(chǎn)業(yè)落地,為客戶提供C-V2X一站式測試解決方案和委外服務(wù)。方案覆蓋終端接入層一致性、協(xié)議棧一致性和場景功能測試。
注:文中部分內(nèi)容參考于Vector。
參考文獻
CSAE 157-2020合作式智能運輸系統(tǒng) 車用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)(第二階段)
-
V2X
+關(guān)注
關(guān)注
25文章
215瀏覽量
44044
發(fā)布評論請先 登錄

?車聯(lián)網(wǎng)V2X通信:貼片電容信號完整性優(yōu)化與EMC設(shè)計
V2X技術(shù)全解析
基于CANoe的V2X安全通信方案
有獎試用!!RA-Eco-RA4M2-100PIN-V1.0開發(fā)板試用活動報名

安全可靠的V2X路側(cè)基礎(chǔ)設(shè)施白皮書發(fā)布
V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

車聯(lián)網(wǎng)HIL仿真測試解決方案

SmartDV將SDIO系列IP授權(quán)給RANiX開發(fā)車聯(lián)網(wǎng)(V2X)產(chǎn)品

基于V2X和自動駕駛HIL聯(lián)調(diào)的仿真測試系統(tǒng)開發(fā)

如何應(yīng)對V2X頻譜挑戰(zhàn)
設(shè)計仿真 | 基于VTD的V2X仿真應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論