 技術分享|使用TSMaster從零打造車輛控制器HIL實時仿真系列5-ECU HIL仿真的具體實施
技術分享|使用TSMaster從零打造車輛控制器HIL實時仿真系列5-ECU HIL仿真的具體實施
HIL實時仿真系列5
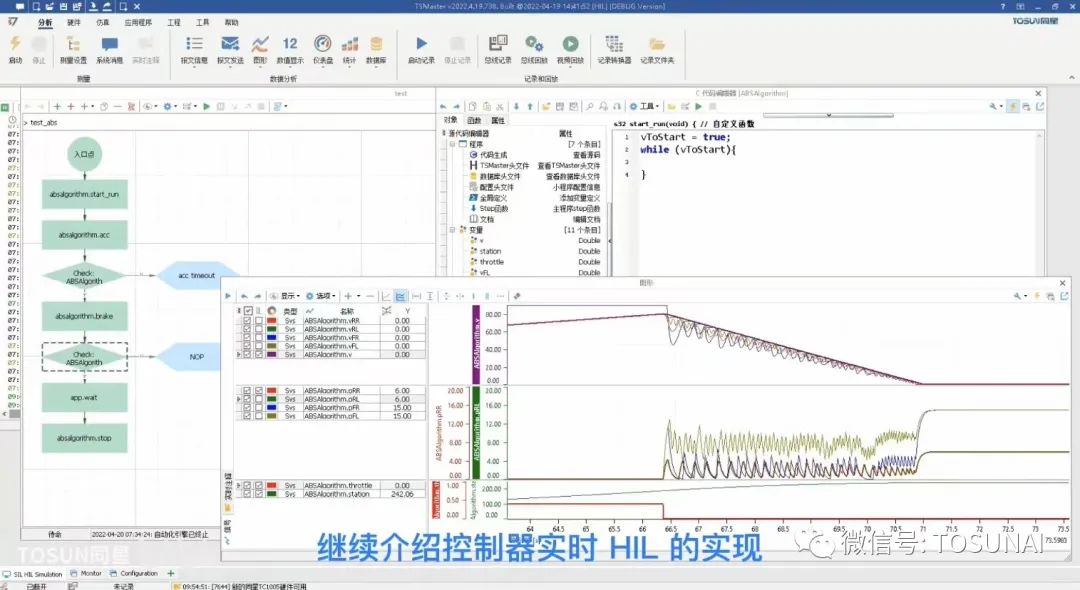
今天我們來到《TSMaster 從零打造車輛控制器HIL實時仿真系列》第五章節,繼續介紹控制器實時HIL的實現。
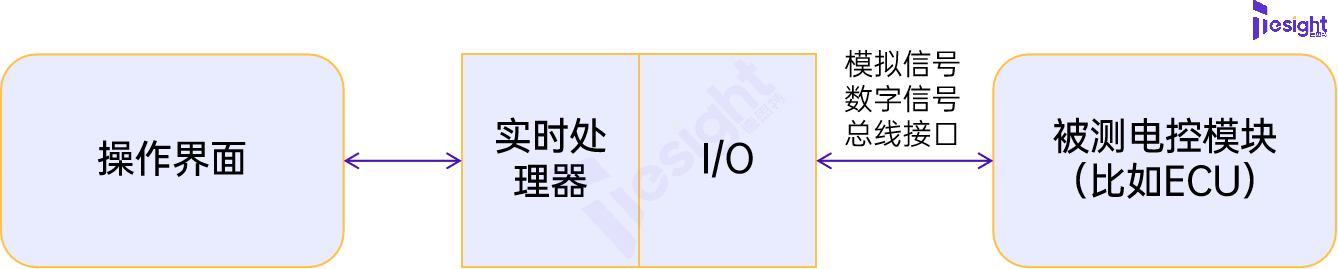
HIL硬件在環
上一個章節介紹的ABS算法仿真和車輛模型的運行,它們的功能并不是簡簡單單地繪制曲線,搜集運行數據,而是有著更深層次的目的,那就是與外部世界聯動,將輸入和輸出數據完完全全暴露在真實世界中,達到HIL的真正目的——硬件在環。
與外部世界交互這個過程可以說十分簡單,只需要為此專門設計一個dbc文件,加載到TSMaster中,再將系統變量中的內容映射到總線上即可。
在此我準備了一個簡單的dbc文件,它包含四個輪速,還有四個輪缸壓力信號。我們將其拖入tsmaster中。
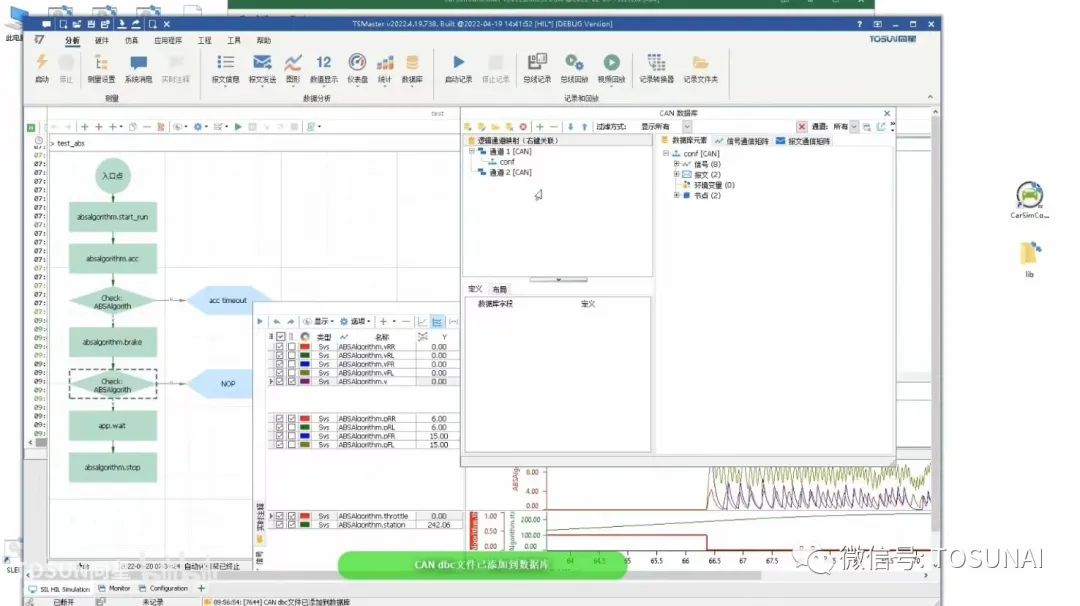
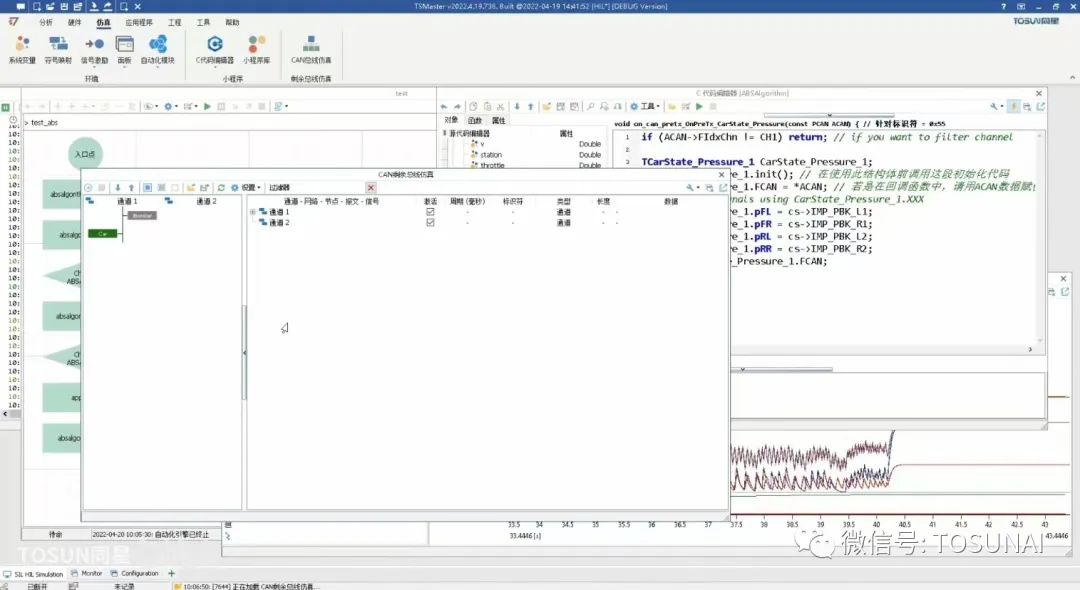
再打開RBS,讓剩余總線仿真接管這些信號的發送
隨后我們打開硬件通道選擇器,將CAN通道選擇為同星的一款總線工具——TC1005,作為演示,TC1005的通道1 和通道 2互相連接在了一起,確保發出的報文可以被正確應答。
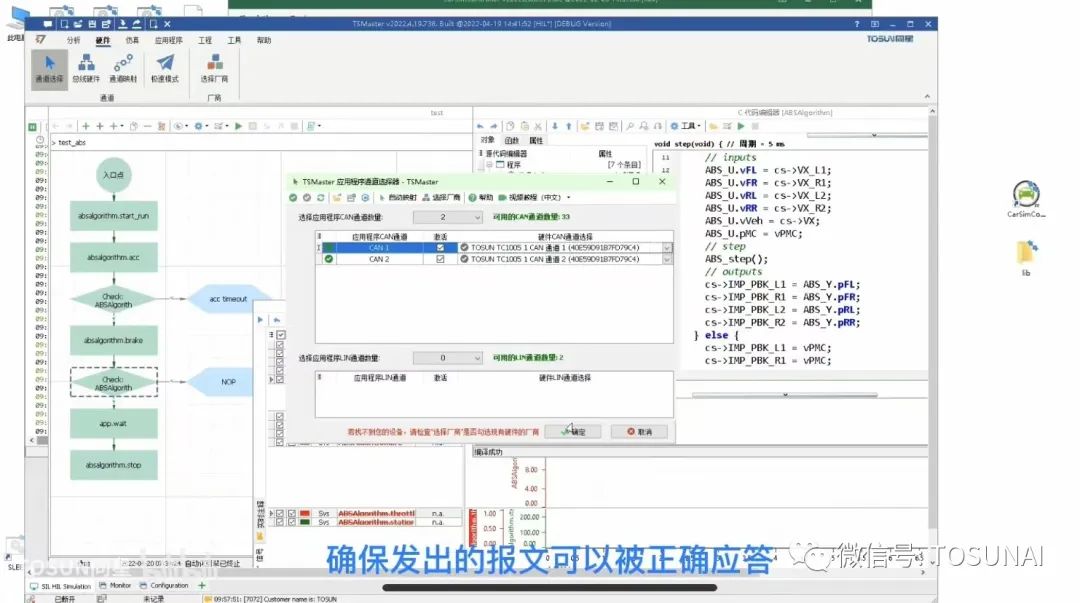
我們啟動RBS,打開Trace窗口,就可以看到我們需要的信號都在總線上以預定的頻率發送著,當然這些信號由于沒有更新,初始值都是0,下一步就是
做信號綁定,將系統變量中的值傳給這些信號。
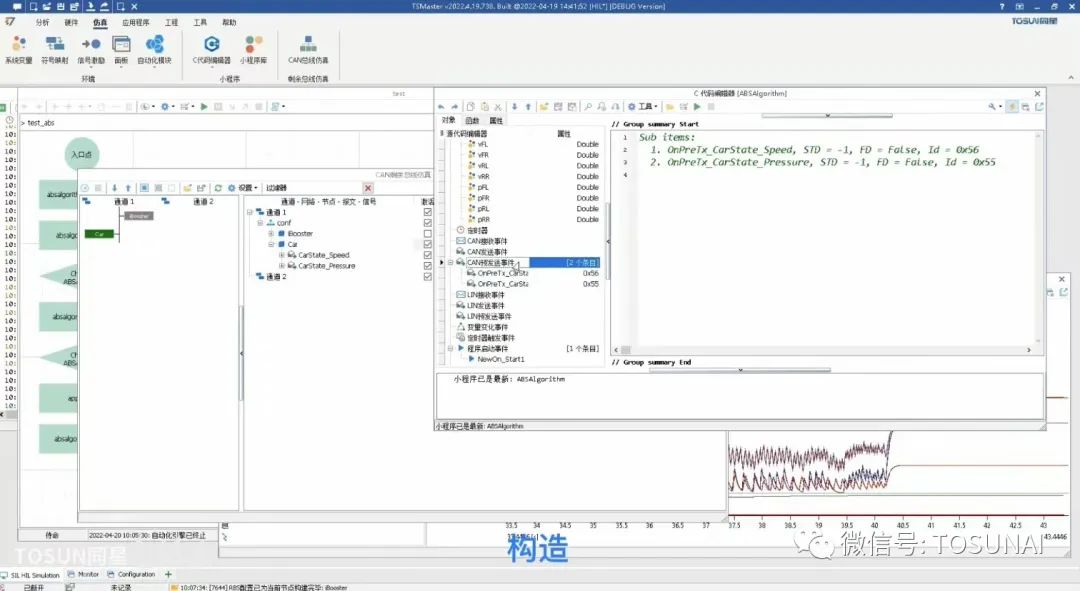
首先停止仿真,回到我們的算法小程序,添加預發送函數,接管輪速和壓力報文的發送過程,這意味著每當報文即將被發出,系統都會調用這些預發送函數,我們只需要簡單地在這些函數內更新我們所需的信號即可。
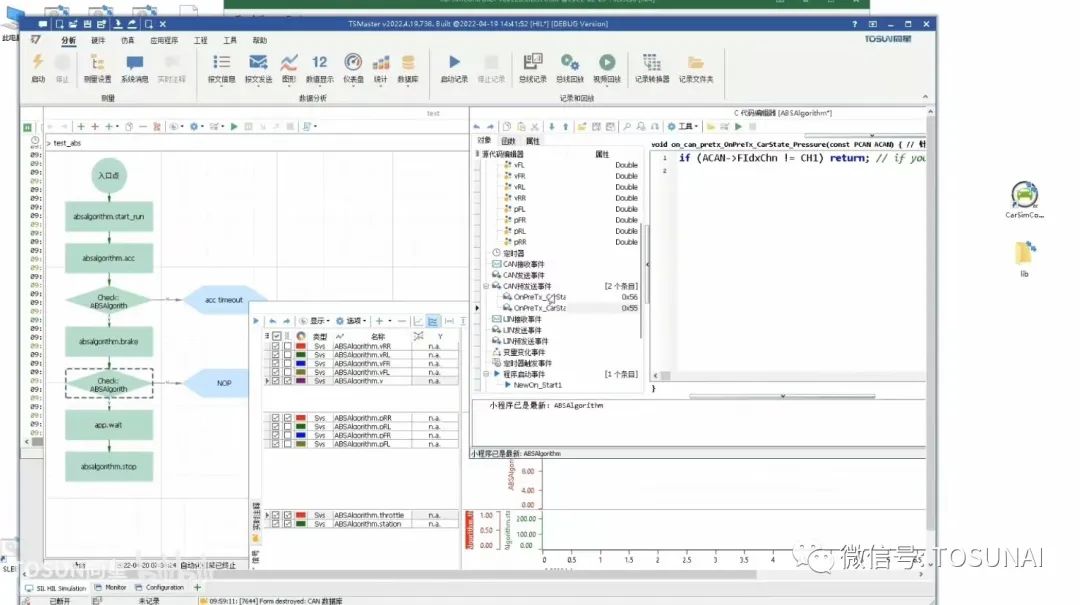
我們試著賦一下值。最后我們在圖形窗口中,添加需要觀測的CAN信號,包括速度信號和壓力信號等等。
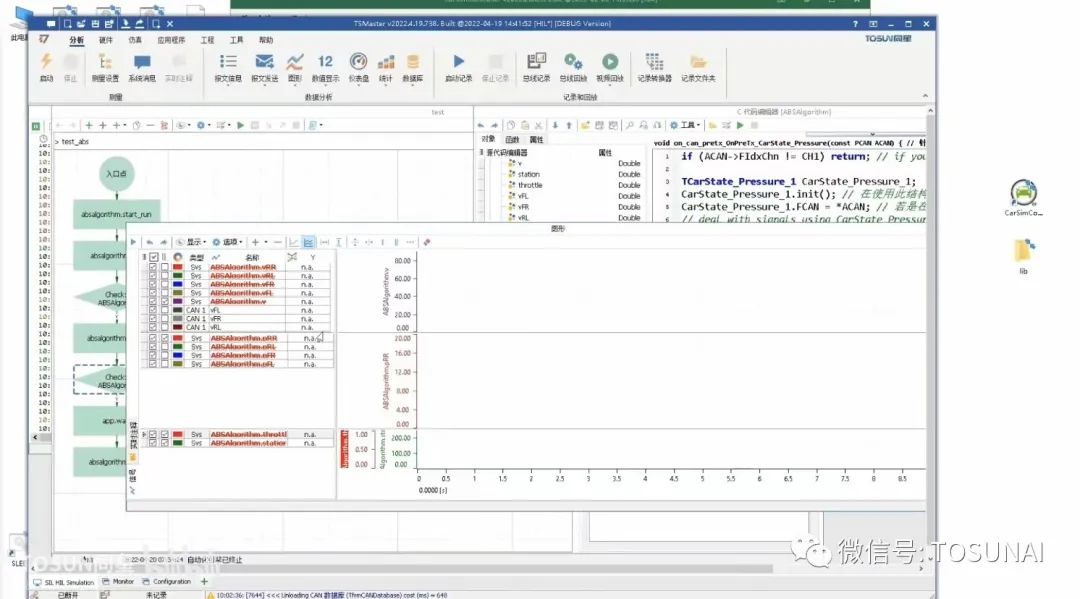
至此,我們完成了所有所需的信號的預發送函數,是時候啟動整個仿真過程了,還是同樣的流程,連接TSMaster的應用程序,點擊自動化模塊的啟動按鈕。可以看到車輛正在運行過程中。
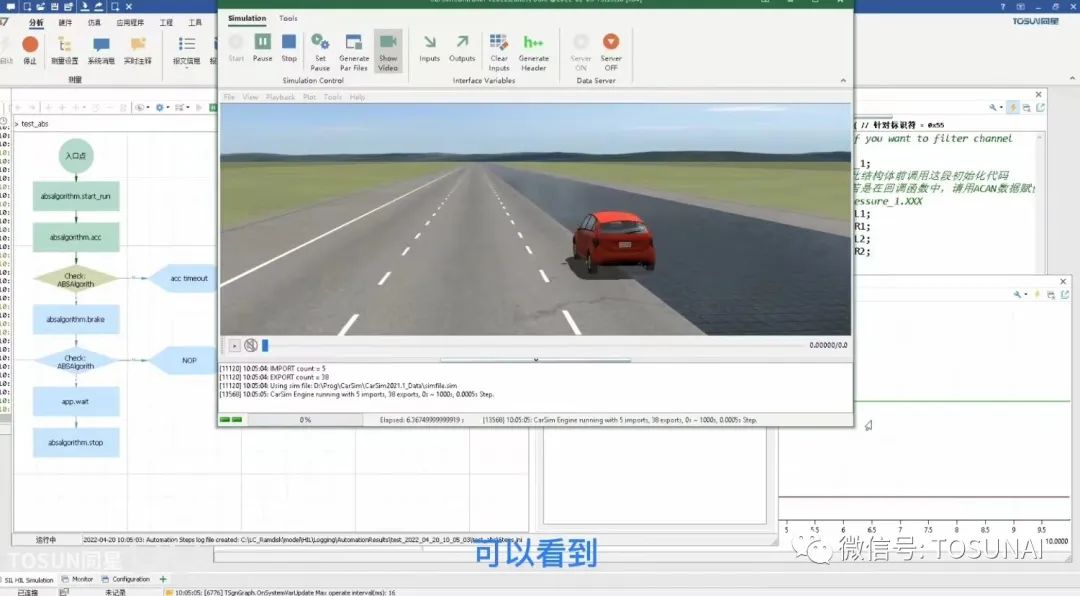
隨著程序的運行,我們可以實時觀測到總線上活躍的輪速和壓力信號,這些信號就最終與真實世界發生了交互。
實現車輛控制器的HIL仿真
有了前面的基礎,可以說此時我們真正踏入了HIL實時仿真的大門。使用這一整套流程,以不變應萬變,實現各式各樣的車輛控制器的HIL仿真。
舉個簡單的例子,倘若我們需要對所開發的ibooster進行 HIL仿真, ibooster是真實的ECU。我們就需要導入這個ibooster的所有網絡的dbc文件,用我們的RBS將它所需的信號全部仿真出來。
而要仿真信號,最簡單的方法則是,在RBS仿真界面上,選中我們所需的ibooster節點,點擊右鍵,一鍵自動生成HIL配置,這步操作可以自動激活 ibooster依賴的其他節點和報文。
其次,來到小程序中,通過預發送函數,構造此節點所需的各類總線信號。
再接下來就是一些硬件的信號,比如遇到踏板信號,可以通過電缸自動化接口或是定制的 API實現。
同時,如果遇到IO或通斷信號,則通過我們的IO板卡和繼電器板卡API實現;
如果是遇到輪速等特殊傳感器信號,則通過我們的輪速模擬板卡API實現;
如果遇到電源電壓的控制,可以使用可編程電源配合API 的方式實現;
最后,我們可以打開自動化模塊,編寫一系列用例,來對我們的產品進行各種可能的測試。
當然,這一切背后還有個重要的前提,那就是軟件之外的一切準備工作,也就是ECU機械和液壓負載必須提前準備完畢。
只要上述內容都就緒,那么便可以設計并最終執行無人值守的全自動化參數遍歷和測試,在測試結束后,再通過預先配置的信息,實現測試報告的一鍵自動生成。
最后的實現內容,由于細節過于繁雜,實現方式各異,在此從略,我們有理由相信,基于TSMaster的這一整套仿真架構,小伙伴們也可以發揮自己的聰明才智,設計出各式各樣的HIL實時仿真系統。
系列結語
至此,使用TSMaster從零打造車輛控制器HIL實時仿真系列就全部介紹完畢,在此僅僅是拋磚引玉,讓我們共同將TSMaster的潛力發揮出來。(具體操作步驟詳情可直接觀看我們的B站視頻哦~)
-
仿真
+關注
關注
51文章
4241瀏覽量
135319
發布評論請先 登錄
電力電子半實物仿真(HIL)原理及應用

智能駕駛HIL仿真測試解決方案

優化電動汽車充電器控制:C-HIL技術與雙有源橋實時仿真解決方案


汽車HiL測試:利用TS-GNSS模擬器掌握硬件性能的仿真藝術
GNSS仿真中的HiL延遲:挑戰、影響與解決方案深度剖析
基于TSMaster的MIL/HIL仿真開發(空簧和連續阻尼控制篇)

PPEC-HIL 三相整流逆變實時仿真測試
PPEC-HIL 三相整流逆變實時仿真

【干貨分享】硬件在環仿真(HiL)測試

教學驗證篇丨PPEC+HIL BUCK仿真驗證
教學驗證篇丨PPEC+HIL 單相逆變仿真驗證
教學驗證篇丨PPEC+HIL DAB仿真驗證
教學驗證篇丨PPEC+HIL LLC拓撲仿真驗證
PPEC+HIL LLC拓撲仿真驗證





 工商網監
工商網監
評論