") 虹科案例 | 2015年 Case 821F 輪式裝載機(jī)失去通訊
虹科案例 | 2015年 Case 821F 輪式裝載機(jī)失去通訊

當(dāng)我被詢問是否想去海邊去檢查一輛懷疑CAN通訊有問題的裝載機(jī)時(shí),我期待可以花一些時(shí)間來(lái)欣賞北海感受海風(fēng)。可憐的是,我知道我遙遠(yuǎn)地去海邊是去一個(gè)許多海鷗在飛來(lái)飛去的回收?qǐng)鲋車?/span>
我在這里要檢查的機(jī)器已經(jīng)遭遇了數(shù)周的間歇性故障并且沒有明確的方式來(lái)使故障發(fā)生。操作員告訴我它有時(shí)可以工作幾個(gè)小時(shí),但其他時(shí)候一開始運(yùn)作就會(huì)出現(xiàn)故障。與往常一樣,確保你可以從客戶那邊獲得盡可能的信息,因?yàn)樗梢哉f明你開始思考可能的故障。更重要的是,你應(yīng)該嘗試重現(xiàn)故障來(lái)確認(rèn)問題。不要去修沒壞的東西。而間歇性故障就在于它是間歇性的。由于沒有特定的方式來(lái)重現(xiàn)故障,我們最好先對(duì)機(jī)器的DTC進(jìn)行掃描。
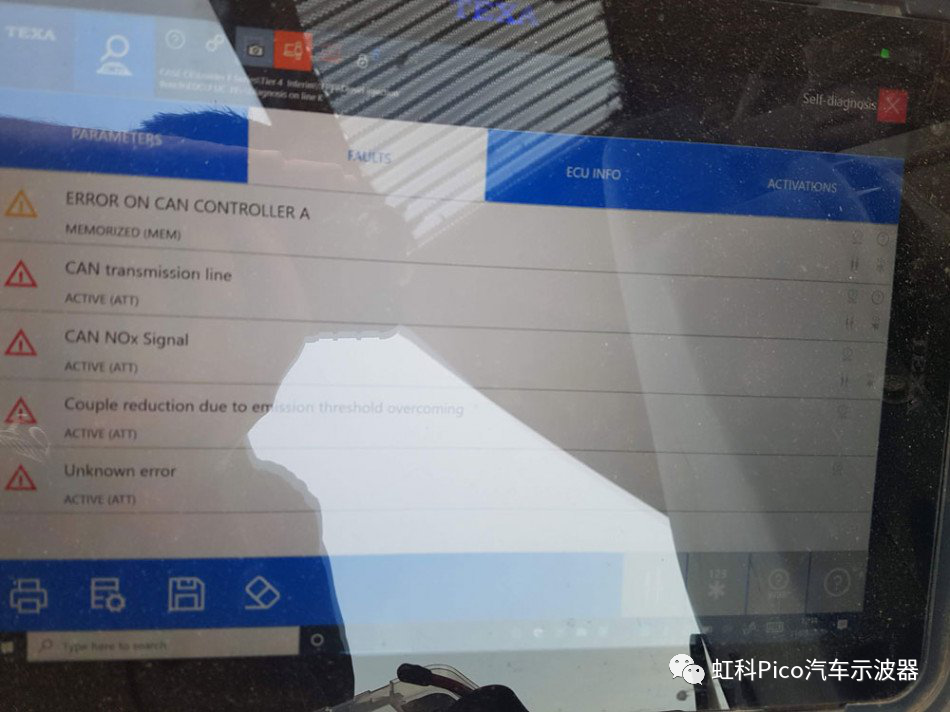
幸運(yùn)地,我們有了一些儲(chǔ)存故障代碼,所有的故障點(diǎn)都指向CAN的問題。
有趣的是,機(jī)器的儀表還閃爍了警告燈表示發(fā)動(dòng)機(jī)CAN訊號(hào)逾時(shí)以及DEF/AdBlue的警告燈表示噴射故障與扭力受限。隨著DTC的紀(jì)錄看一些進(jìn)一步的方向,我們清除了故障代碼希望他能再重現(xiàn)。我們連接示波器以便我們可以在故障發(fā)生時(shí)捕獲一些信息。設(shè)置好示波器來(lái)監(jiān)測(cè)在機(jī)器運(yùn)作的期間的CAN網(wǎng)絡(luò),考慮到儲(chǔ)存的故障碼,這似乎是最好的行動(dòng)方案。這款裝載機(jī)的網(wǎng)絡(luò)并不復(fù)雜,因?yàn)樵贐US上的ECM相對(duì)較少。然而這是一臺(tái)2015年的機(jī)器,運(yùn)作的時(shí)間已經(jīng)超過13000小時(shí),并且對(duì)于要接近發(fā)動(dòng)機(jī)艙較困難。
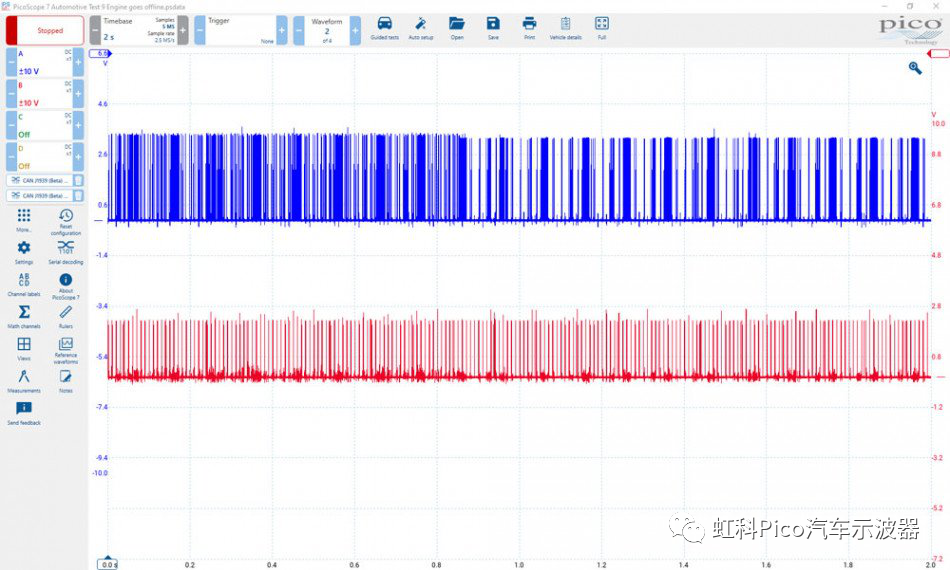
幸運(yùn)的是,發(fā)動(dòng)機(jī)的ECU相當(dāng)容易接近,使連接上更直接方便。不過我沒有考慮到人為錯(cuò)誤。下面是在我啟動(dòng)機(jī)器后就捕獲到的數(shù)據(jù),我立刻得出了結(jié)論。
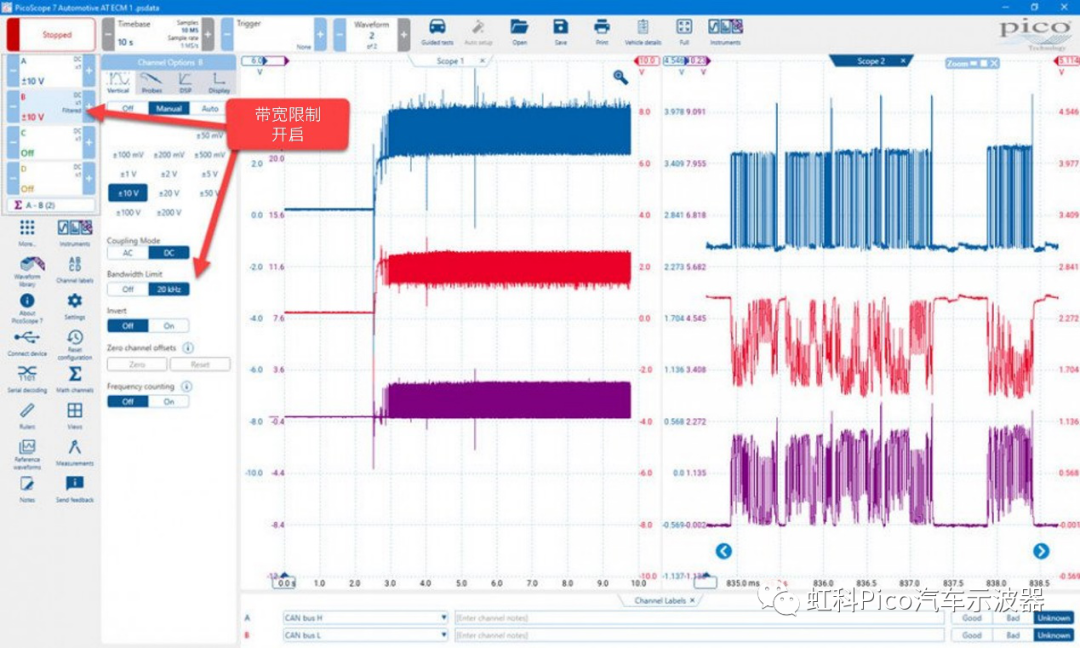
如你所見,與信道A相比,信道B極度失真,這就是A-B數(shù)學(xué)信道具有失真物理層的原理。在我注意到明顯的問題之前我甚至認(rèn)為我遇到了故障。在PicoScope7中,通道區(qū)為你提供設(shè)置的一些詳細(xì)信息,例如探頭、量程、耦合與濾波。是的,我忘了關(guān)閉20kHz的硬件過濾器。之前設(shè)置它是為了演示4*25 and 4*25A示波器的可用功能。帶寬限制是為了去除示波器中高于20kHz的頻率,因此與軟件中的DSP濾波器不同,沒有辦法取得這些資料。這個(gè)過濾器對(duì)于電流鉗相當(dāng)有用,并且在察看可能有高頻干擾影響的訊號(hào)時(shí)(例如MAF傳感器與含氧傳感器),但對(duì)于CAN訊號(hào)則不太有幫助。
在花了一些時(shí)間查看后我認(rèn)為是接線問題,很明顯問題只出現(xiàn)在那個(gè)通道,最后才恍然大悟,如果我使用的是PicoScope6,我認(rèn)為需要更長(zhǎng)的時(shí)間才能意識(shí)到,因?yàn)槟惚仨殞?shí)際打開信道選項(xiàng)來(lái)查看帶寬限制是否處于開啟狀態(tài)。
在恢復(fù)了通道B之后,我們開始嘗試捕獲故障并利用新的J1939譯碼器來(lái)說明更好地了解故障發(fā)生時(shí)那些ECU與于開啟或關(guān)閉狀態(tài)。
我們很確定的一件事是對(duì)于這類的非道路機(jī)械而言,要獲得詳細(xì)的線路圖是很困難的一件事。
在我到達(dá)現(xiàn)場(chǎng)之前,我試圖去找到一張線路圖結(jié)果發(fā)現(xiàn)那張線路圖與此機(jī)械完全不同。幸運(yùn)的是,我們似乎有一張與機(jī)器互相匹配的線路圖。我重新繪制了CAN連接部分如下圖:
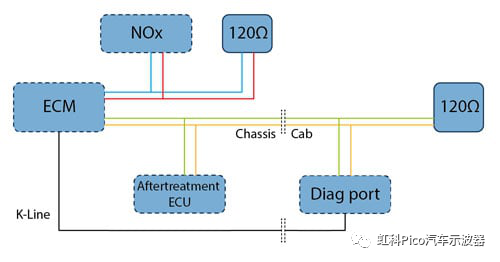
我只想解釋一些,并沒有把所有在駕駛室的ECU都列出來(lái)。其他還有儀表板,遠(yuǎn)程通信與其他單元,但那些與此故障無(wú)關(guān)。我仍然懷疑這張圖不是正確的,因?yàn)槲艺J(rèn)為NOx傳感器不會(huì)單獨(dú)出現(xiàn)在上面。然而,這就是我們所要做的。最有趣的部分是從診斷接頭到ECM的K線,它說明我們必須使用串型工具(CAN (J1939), J1587 or K-Line)來(lái)進(jìn)行通訊的選項(xiàng)。
經(jīng)過一段時(shí)間的駕駛和運(yùn)作機(jī)器后故障終于出現(xiàn)在儀表板上。有趣的是,當(dāng)我們?cè)噲D使用J1939協(xié)議來(lái)讀取故障碼時(shí),我們無(wú)法進(jìn)入ECM,儀表板出現(xiàn)故障。相反地,我們發(fā)現(xiàn)與ECM通訊的唯一方式是使用K線,然后我們又試了一次J1939,突然就可以通訊了。我們連接示波器來(lái)看看我們是否能夠發(fā)現(xiàn)CAN網(wǎng)絡(luò)中發(fā)生的事情。我們連接了兩條CAN線,但使用示波器的浮動(dòng)輸入,這代表我們只需要兩個(gè)通道就可以進(jìn)行此捕獲。
浮動(dòng)輸入僅適用于 4*25/4*25A 范圍的示波器。我們很幸運(yùn),故障變得越來(lái)越明顯,這代表捕獲它變得更容易了。
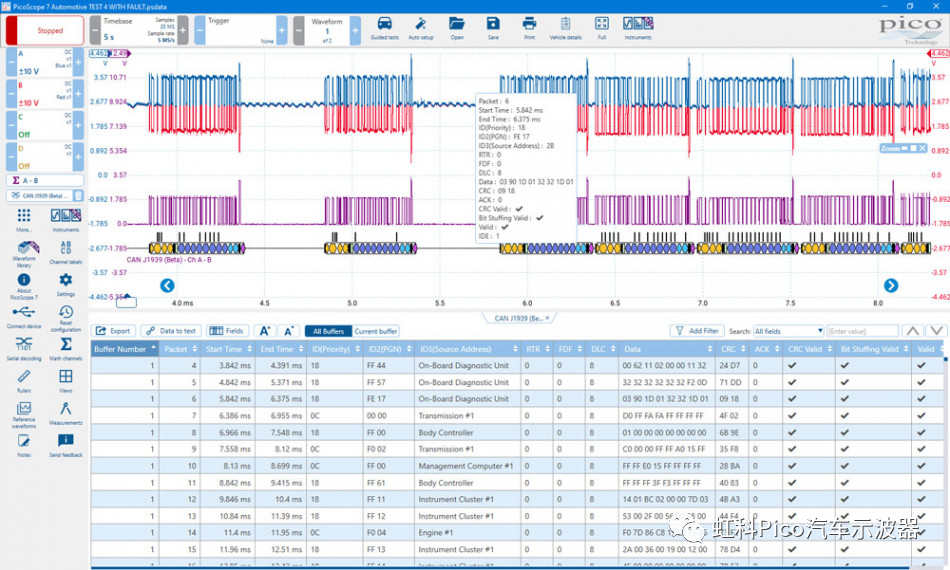
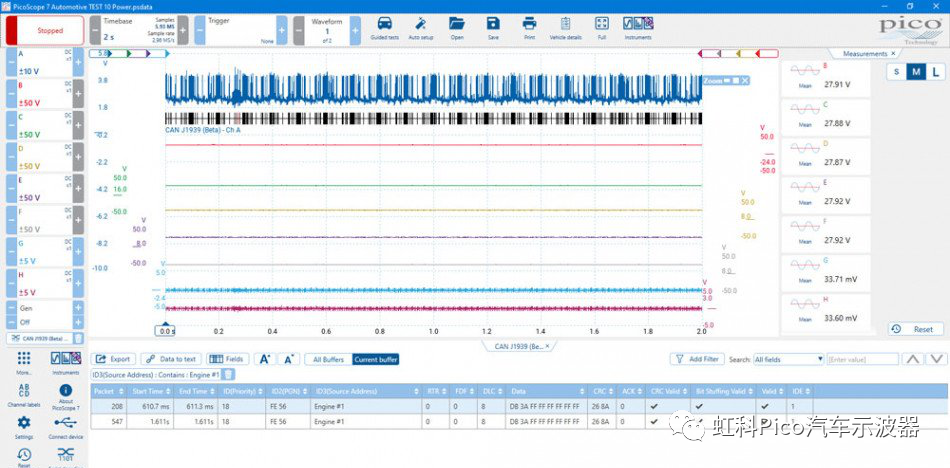
上面的捕獲不是立即發(fā)生的,這是一個(gè)捕獲30分鐘的過程,希望你能看到,在這張波型圖的中間,通道A的數(shù)據(jù)包減少了,而通道B在前后都保持一致。
藉由使用J1939譯碼器和鏈結(jié)文件把譯碼后的源地址ID轉(zhuǎn)換成可讀的信息,我們可以看到當(dāng)時(shí)發(fā)生了什么。我們知道發(fā)動(dòng)機(jī)ECM是在故障時(shí)無(wú)法使用串型工具來(lái)與它通訊,因此找尋這個(gè)是我們的首要事項(xiàng)。
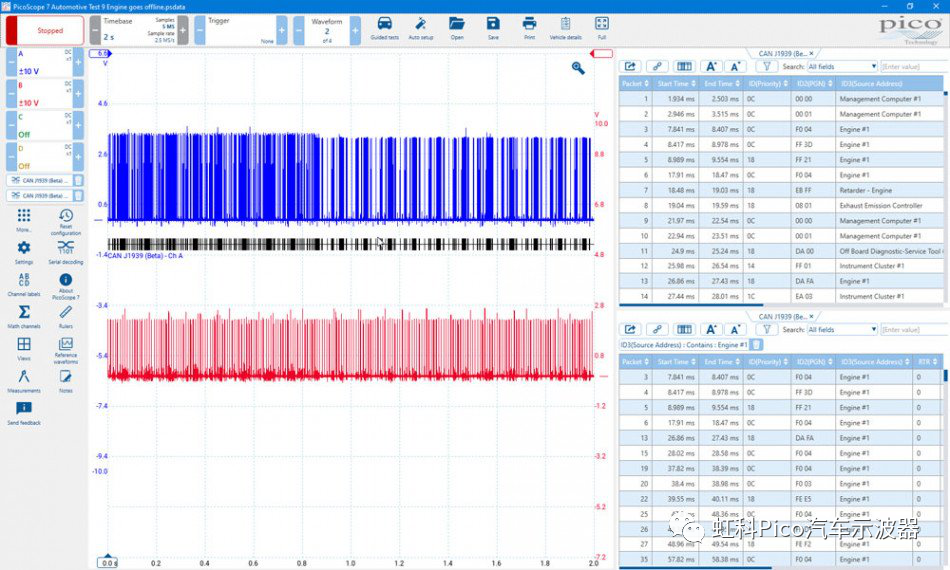
我添加了一個(gè)額外的譯碼表來(lái)更好地顯示這個(gè)過程。我在底部的觀看窗口添加了一個(gè)過濾器,這樣我們就可以只看到源地址存在發(fā)動(dòng)機(jī)#1的譯碼數(shù)據(jù)。我們?cè)噲D查看發(fā)動(dòng)機(jī)#1在失去通訊期間是否有脫機(jī),或是發(fā)生其他事情。正如我們?cè)诎l(fā)動(dòng)機(jī)ECU上量測(cè)的那樣,這種下降與接線問題無(wú)關(guān)。透過將鼠標(biāo)停在圖表上的數(shù)據(jù)包上,我們大致了解波型的變化發(fā)生數(shù)據(jù)包約在500附近。
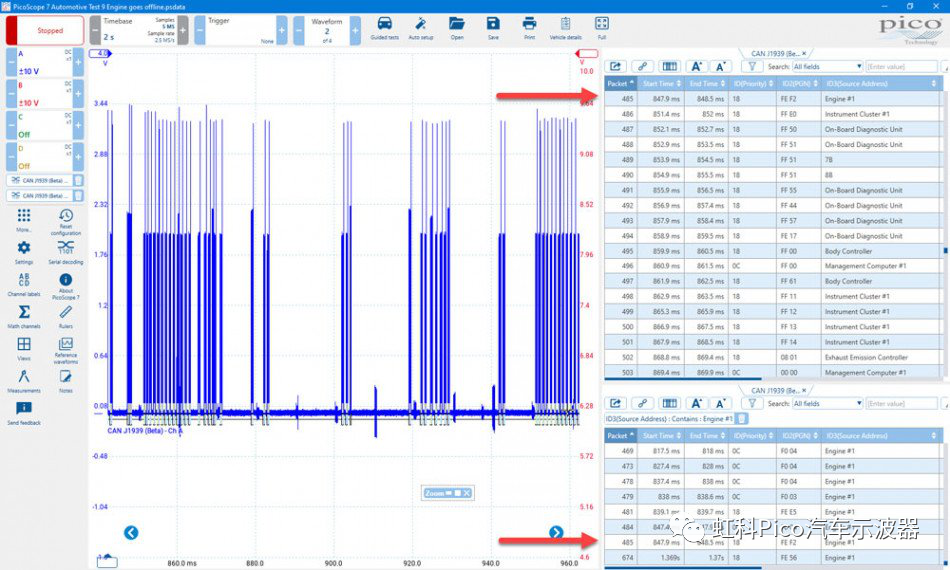
你可以看到在觀看窗口頂端的已譯碼信息,并在窗口底部看到發(fā)動(dòng)機(jī)#1的過濾數(shù)據(jù)包。我在兩個(gè)窗口標(biāo)記了發(fā)動(dòng)機(jī)#1的數(shù)據(jù)包,約在500附近。如同你所看到的,發(fā)動(dòng)機(jī)#1在485數(shù)據(jù)包之后沒有向網(wǎng)絡(luò)提供進(jìn)一步的流量,但所有其他ECU很多且在線將數(shù)據(jù)發(fā)送到總在線。ECM丟失與我們看到的故障碼以及我們無(wú)法透過CAN總線通訊(只能透過K線)讓我們更加確定這個(gè)問題。
為了確保我們了解所有可能性,下一步是在ECM在開啟和關(guān)閉時(shí)檢查電源和接地的供應(yīng)。我們想要確保當(dāng)ECM關(guān)閉時(shí)不會(huì)失去電源。由于ECU的電源數(shù)量很多,因此最好使用8通道的示波器來(lái)捕獲所有的內(nèi)容。當(dāng)然,你仍然可以使用4通道是波器來(lái)檢查且拆分為多次捕獲。
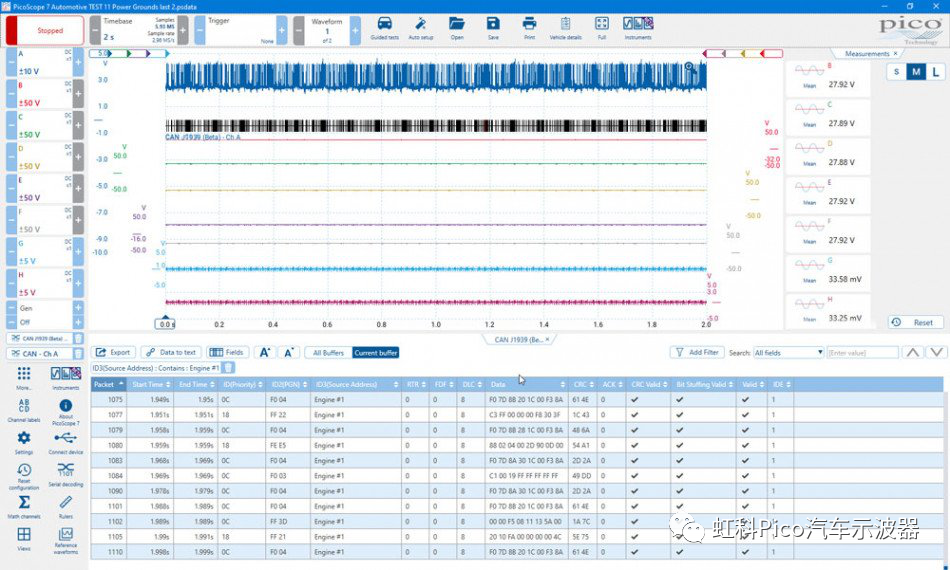
當(dāng)ECM在線,我們可以看到在一個(gè)緩沖區(qū)2秒的時(shí)間內(nèi),我們有來(lái)自發(fā)動(dòng)機(jī)#1的1110個(gè)數(shù)據(jù)包,還記錄了27.9V的電壓。當(dāng)你認(rèn)為此捕獲是在發(fā)動(dòng)機(jī)工作進(jìn)行時(shí),這與預(yù)期的一樣。我們還可以看到接地電壓值極低,為33.5mV。
相比之下,當(dāng)發(fā)動(dòng)機(jī)#1在關(guān)閉時(shí),我們只有兩個(gè)數(shù)據(jù)包,電源跟接地電壓穩(wěn)定。有了這些信息后,我們決定告知客戶至少需要檢查發(fā)動(dòng)機(jī)的ECU。與許多工作機(jī)械一樣,讓它停止運(yùn)作比單換零件成本更高。因此透過CASE訂購(gòu)了一個(gè)ECU,且請(qǐng)求他們來(lái)安裝并程序設(shè)計(jì)ECU。有趣的是,負(fù)責(zé)這樣工作的技術(shù)人員表示,它懷疑是否這樣能解決問題,因?yàn)樗鼜奈纯催^這故障。然而,證據(jù)很清楚,我們沒有看到其他可能導(dǎo)致的問題。透過PicoScope記錄所有內(nèi)容,我們可以回顧每個(gè)步驟,來(lái)確保我們?nèi)源_定進(jìn)行更換。六個(gè)月后,機(jī)器仍按預(yù)期工作。
我希望這會(huì)有所幫助,這表示新的J1939譯碼器可以與串型工具一起使用來(lái)幫助診斷。在此感謝Darren Savage有機(jī)會(huì)加入它的冒險(xiǎn)旅程。
-
通訊
+關(guān)注
關(guān)注
9文章
927瀏覽量
35652
發(fā)布評(píng)論請(qǐng)先 登錄
虹科分享 | 賦能現(xiàn)代化礦業(yè):虹科Owasys堅(jiān)固型車載通信終端方案

虹科活動(dòng) | 廣州示波器診斷體驗(yàn)交流日?qǐng)A滿落幕!NVH專場(chǎng)即將上線!
裝載機(jī)遠(yuǎn)程監(jiān)控運(yùn)維管理系統(tǒng)解決方案

虹科直播回放 | IO-Link技術(shù)概述與虹科IO-Link OEM
虹科直播 | 2月18日開講!IO-Link技術(shù)深度解析!解鎖虹科自研產(chǎn)品+積分好禮!
回顧威盛科技2024年度高光時(shí)刻
虹科電子12月事件回顧
電動(dòng)裝載機(jī)遠(yuǎn)程監(jiān)控運(yùn)維管理系統(tǒng)方案

虹科培訓(xùn) | 重磅來(lái)襲!波形分析課程全面上線!
虹科活動(dòng)回顧 | 波形診斷開放日-上海站圓滿落幕!
精準(zhǔn)定位隧道挖掘通訊難題:虹科PCAN卡如何滿足專業(yè)通訊需求?
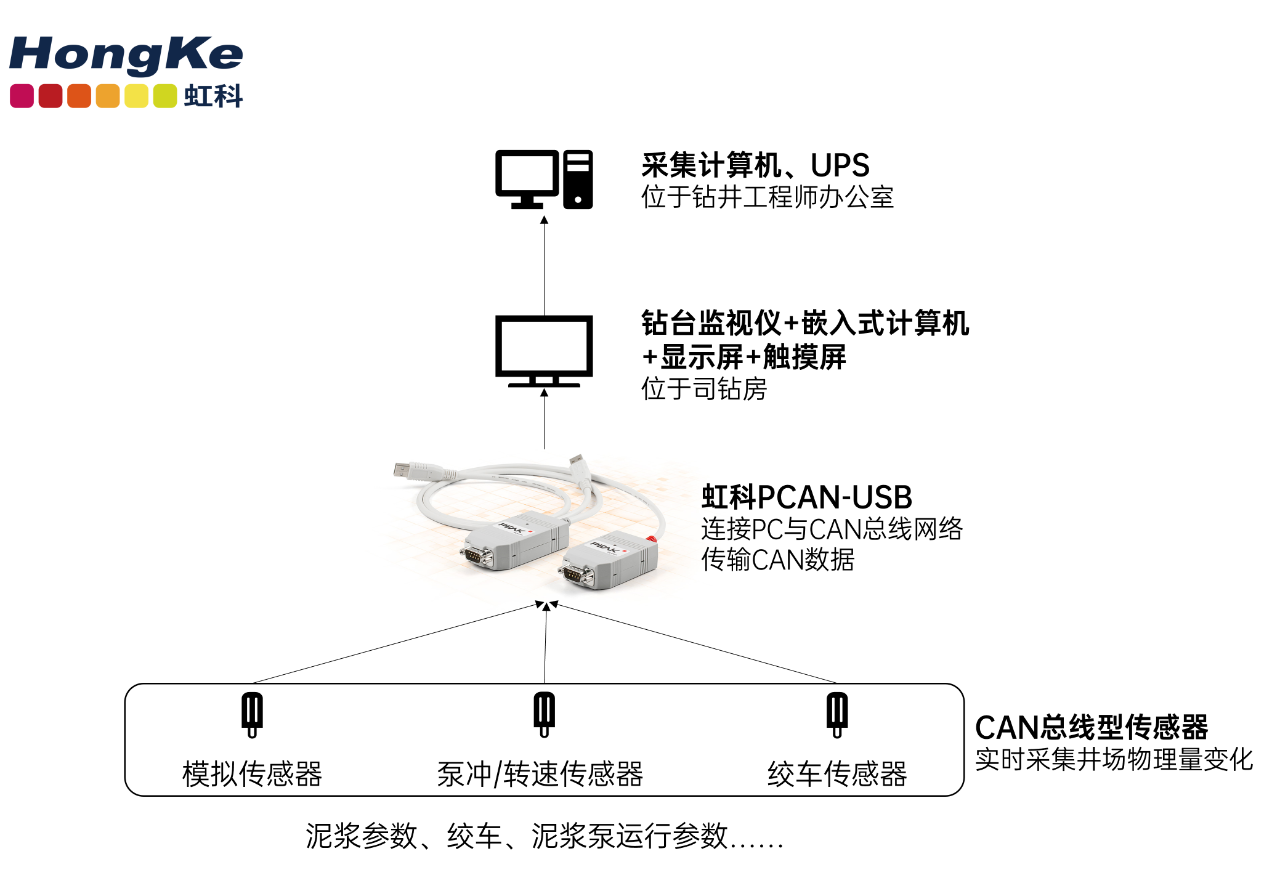
虹科應(yīng)用 為什么虹科PCAN方案能成為石油工程通訊的首選?
恭喜虹科榮獲“CEC 2024年度編輯推薦獎(jiǎng)”!
虹科方案 領(lǐng)航智能交通革新:虹科PEAK智行定位車控系統(tǒng)Demo版亮相

虹科應(yīng)用 當(dāng)CANoe不是唯一選擇:發(fā)現(xiàn)虹科PCAN-Explorer 6





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論