") PNI慣性傳感器(IMU)10軸模塊
PNI慣性傳感器(IMU)10軸模塊

PNI的運(yùn)動姿態(tài)測量模塊以小巧、低功耗、易于集成的包裝,提供精確的航向角以及定位數(shù)據(jù).
M&M 模塊是一系列小型不同形式的組合板卡,它集成了PNI的超低功耗 Sentral-A2 運(yùn)勱協(xié)處理器和嵌入式傳感器融合算法以及運(yùn)勱傳感器。M&M 模塊允許開發(fā)人員丏注于創(chuàng)建創(chuàng)新的終端應(yīng)用程序,而不是傳感器融合算法。鐵自勱校準(zhǔn)減少了磁失真,幵確保了隨時間變化的準(zhǔn)確性;與其他需要廣泛的傳感器融合算法開發(fā)和傳感器校準(zhǔn)工作的慣性測量單元(IMUs)不同,M&M 模塊是預(yù)先設(shè)計的,以提供高精度的運(yùn)勱跟蹤、航向和環(huán)境數(shù)據(jù),它占用通用微處理器使用的功耗的很小一部分。
M&M Amber 10 軸模塊包括:SENtral-A2、RM3100 磁性 傳 感 器 、 ST LSM6DSL 加 速 度 計 / 陀 螺 儀 以 及 STLPS22H 壓力傳感器(零件號:14047)。
 PNI10軸 IMU
PNI10軸 IMU
特點(diǎn)和好處
?? 低功耗提供了管理功耗和運(yùn)勱跟蹤性能之間的權(quán)衡;
?? 消費(fèi)電子應(yīng)用中無與倫比的航向精度;
?? 連續(xù)的硬鐵和軟鐵自勱校準(zhǔn)減少了磁失真,
?? 磁異常補(bǔ)償,因此頭部和運(yùn)勱跟蹤不受瞬態(tài)磁異常的影響.
技術(shù)規(guī)格
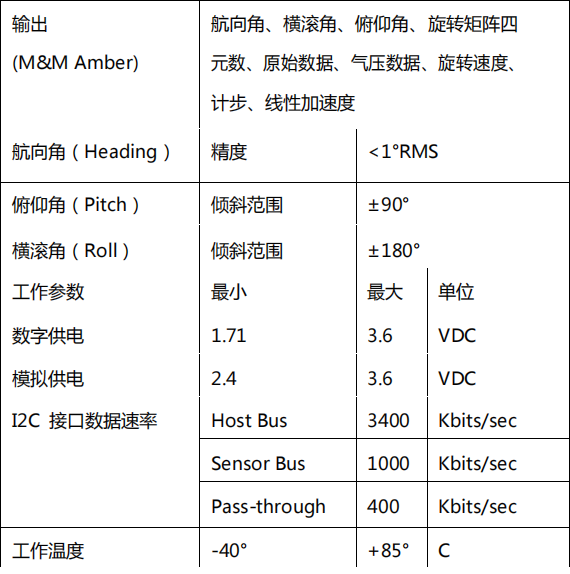 PNI 10軸運(yùn)動姿態(tài)模塊技術(shù)參數(shù)
PNI 10軸運(yùn)動姿態(tài)模塊技術(shù)參數(shù)
PNI擁有超過 30 年行業(yè)經(jīng)驗(yàn),是世界領(lǐng)先的精確定位勱作捕捉和真實(shí)應(yīng)用中的傳感器融合算法丏家。PNI的傳感器和算法是實(shí)現(xiàn)物聯(lián)網(wǎng)項(xiàng)目
和其他關(guān)鍵任務(wù)應(yīng)用的基石,其中精確定位、精度和低功耗非常關(guān)鍵。
基于幾十年的丏利傳感器和算法開發(fā),PNI提供了業(yè)界最高性能的地磁傳感器、位置和運(yùn)勱協(xié)處理器、高性能模塊、傳感器融合算法和完整的傳感器系統(tǒng)。
慣性傳感器應(yīng)用
慣性傳感器能夠?yàn)檐囕v中的所有控制單元提供車輛的即時運(yùn)動狀態(tài)。路線偏移,縱向橫向的擺動角速度,以及縱向、橫向和垂直加速度等信號被準(zhǔn)確采集,并通過標(biāo)準(zhǔn)接口傳輸至數(shù)據(jù)總線。所獲得的信號用于復(fù)雜的調(diào)節(jié)算法,以增強(qiáng)乘用車和商用車(例如,ESC/ESP、ADAS、AD)以及摩托車(優(yōu)化的曲線 ABS)、工業(yè)車輛和農(nóng)用車的舒適性與安全應(yīng)用,如下圖示。

在無人車方面的應(yīng)用多與GPS或者GNSS組合使用,如下圖示:
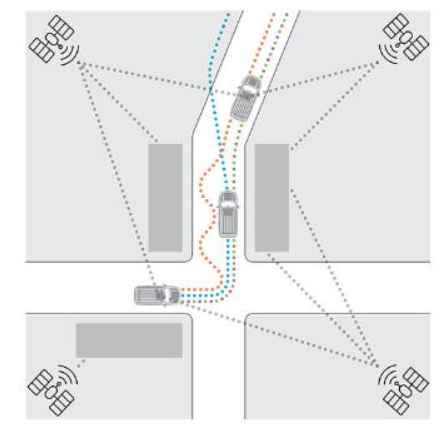
雖然全球?qū)Ш叫l(wèi)星系統(tǒng)和GPS接收機(jī)計算相對于衛(wèi)星你的位置,慣性導(dǎo)航讓你的速度、態(tài)度和任何升沉運(yùn)動測量。結(jié)合使用時,這兩種導(dǎo)航技術(shù)會彼此增強(qiáng)。慣性測量單元(IMU)允許GNSS接收器在衛(wèi)星信號中斷時保持位置不變。相反,GNSS的絕對位置和速度精度有助于補(bǔ)償潛在的IMU錯誤,例如位置漂移。
MEMS慣性傳感器的發(fā)展
未來MEMS慣性傳感器的發(fā)展主要有四個方向:
1、高精度
導(dǎo)航、自動駕駛和個人穿戴設(shè)備等對慣性傳感器的精度需求逐漸提高,精細(xì)化測量需求和智能化的發(fā)展也對傳感器的精度提出了越來越高的要求。
2、微型化
器件的微型化可以實(shí)現(xiàn)設(shè)備便攜性,滿足分布式應(yīng)用要求。微型化是未來智能傳感設(shè)備的發(fā)展趨勢,是實(shí)現(xiàn)萬物互聯(lián)的基礎(chǔ)。
3、高集成度
無論是慣性測量單元還是慣性微系統(tǒng)都是為了提高器件的集成度,進(jìn)而實(shí)現(xiàn)在更小的體積內(nèi)具備更多的測量功能,滿足裝備小體積、低功耗、多功能的需求。
4、適應(yīng)性強(qiáng)
隨著MEMS慣性傳感器的應(yīng)用范圍越來越廣泛,工作環(huán)境也會越來越復(fù)雜,例如:高溫、高壓、大慣量和高沖擊等,適應(yīng)復(fù)雜環(huán)境能夠進(jìn)一步拓寬MEMS慣性傳感器的應(yīng)用范圍。
-
IMU
+關(guān)注
關(guān)注
6文章
362瀏覽量
46708
發(fā)布評論請先 登錄
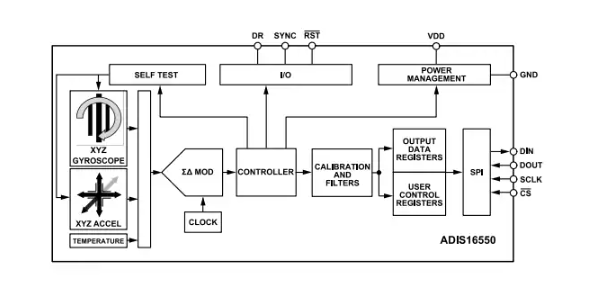
Analog Devices Inc. ADIS16550六自由度慣性傳感器數(shù)據(jù)手冊
求助,關(guān)于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
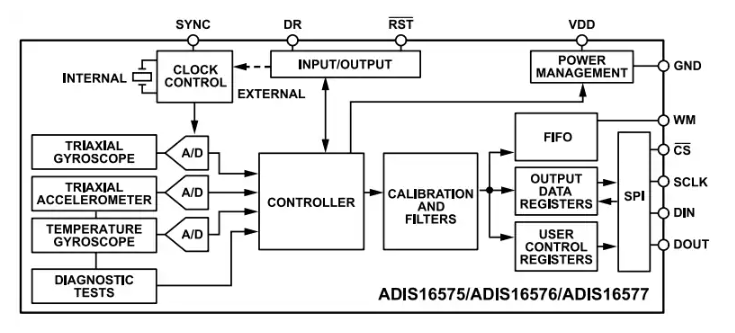
Analog Devices Inc. ADIS1657x精密MEMS IMU模塊數(shù)據(jù)手冊
ADIS16488A術(shù)級10自由度慣性傳感器規(guī)格書
慣性測量單元傳感器在自主移動機(jī)器人的應(yīng)用

慣性傳感器的分類和應(yīng)用
十軸姿態(tài)傳感器模塊 | 集成加速度計、陀螺儀、磁力計,自帶BLE5.0藍(lán)牙

ST攜手PNI打入任天堂Wii U內(nèi)部

什么是雙軸傾角傳感器
PNI運(yùn)動處理器Sentral-13658適用于任何移動設(shè)備
PNI電子羅盤-TCM-XB 安裝及測試校準(zhǔn)的簡要說明
愛普生防水防塵慣性測量模塊M-G552系列選型

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應(yīng)用領(lǐng)域選型介紹

EPSON新品IMU傳感器M-G570PR投產(chǎn),功能更強(qiáng)大!

愛普生將大規(guī)模生產(chǎn)M-G570PR,這是一款采用多傳感器技術(shù)的高精度、低噪聲IMU






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論