") Delta型腿機器狗全動作展示
Delta型腿機器狗全動作展示

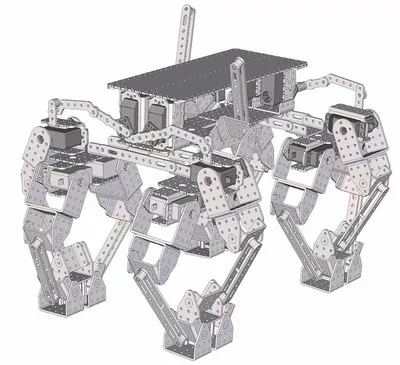
1. 功能說明
本文示例將實現(xiàn)R322樣機Delta型腿機器狗維持身體平衡、原地圓形擺動、原地踏步、蹲起、站立、前進、后退、轉(zhuǎn)向、橫向移動、斜向移動等功能。
2. 電子硬件
本實驗中采用了以下硬件:
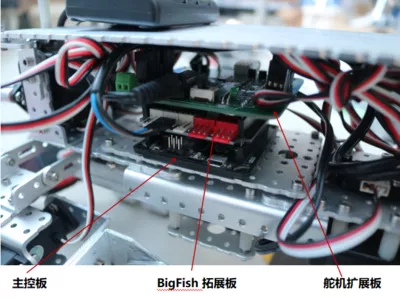
| 主控板 | Basra主控板(兼容Arduino Uno)? |
| 擴展板 | Bigfish2.1擴展板? |
| SH-SR舵機擴展板 | |
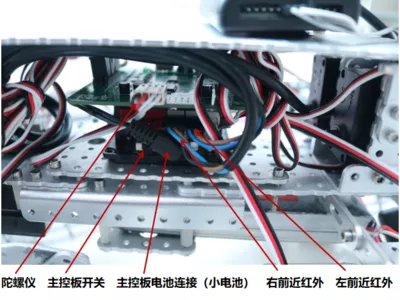
| 傳感器 | 近紅外傳感器 |
| 六軸陀螺儀 | |
| 電池 | 7.4v鋰電池、11.1V動力電池 |
| 其它 | 電壓顯示器 |
電路連接說明:為了便于識別控制Delta型腿機器狗,我們先對機器狗的腿位置編號(如下圖所示):
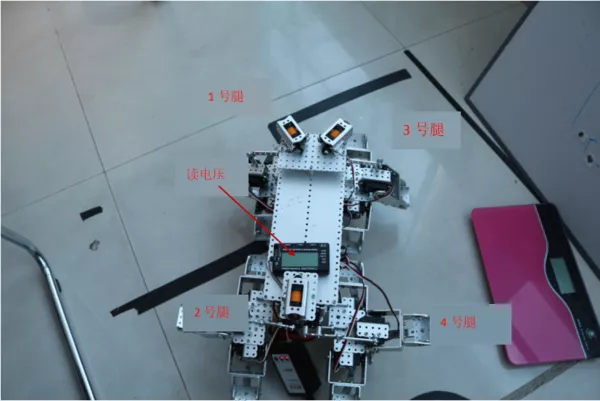
① 硬件連接:
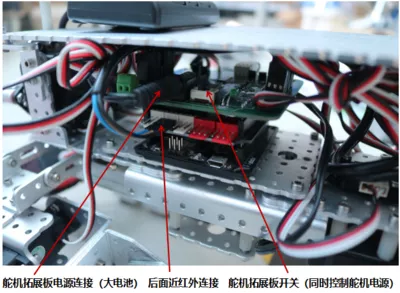
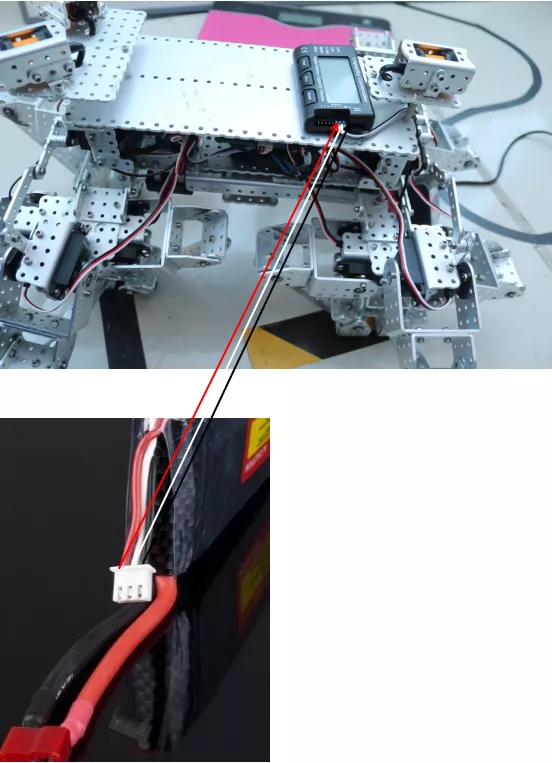
② 電壓顯示器與大電池連接:
③ 舵機接線位置:上面3個舵機分別連接在Bigfish擴展板的D4、D3、D8端口。
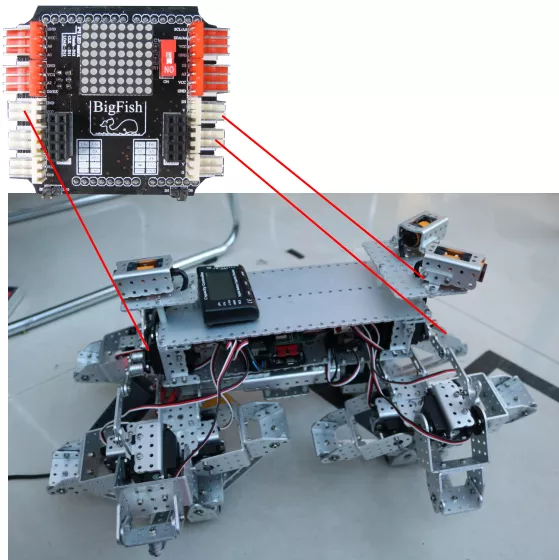
Delta型腿機器狗每條腿有4個舵機,4條腿上總共有16個舵機,將這16個舵機分別連接在SH-SR舵機擴展板的舵機接口上。
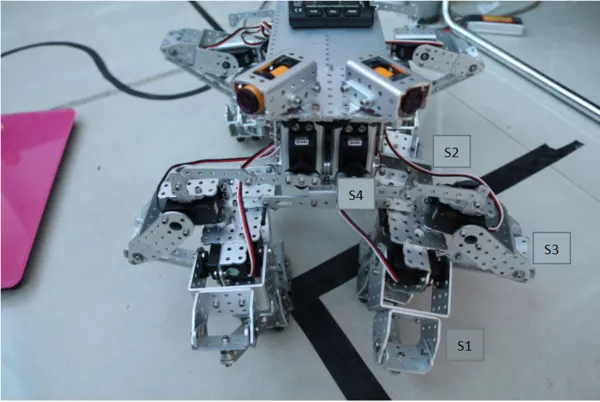
1號腿 :s1連接口9 s2連接口8 s3連接口5 s4連接口6
2號腿 :s1連接口18 s2連接口19 s3連接口20 s4連接口21
3號腿 :s1連接口0 s2連接口2 s3連接口1 s4連接口3
4號腿 :s1連接口27 s2連接口25 s3連接口26 s4連接口24
3. 功能實現(xiàn)
編程環(huán)境:Arduino 1.8.19
下面提供一個Delta型腿機器狗全動作展示(維持身體平衡、原地圓形擺動、原地踏步、蹲起、站立、前進、后退、轉(zhuǎn)向、橫向移動、斜向移動)的參考例程(parallel_dog_display.ino),程序源代碼及樣機3D文件資料詳見 https://www.robotway.com/h-col-242.html,具體實驗效果可參考網(wǎng)站演示視頻。
/*------------------------------------------------------------------------------------ 版權(quán)說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-06-07 https://www.robotway.com/ ------------------------------*/ /***** Copyright 2017 Robot TIme 全動作展示例程 *****/ #include "Tlc5940.h" #include "tlc_servos.h" #include #include "types.h" #include "config.h" // 相關(guān)函數(shù)聲明 /***** 紅外相關(guān)函數(shù) *****/ void IRInit(); //紅外初始化 void enableIR(); //紅外使能 void disableIR(); //關(guān)閉紅外 void updateIR(); //紅外避障更新動作 /***** 平衡相關(guān)函數(shù) *****/ void switchAdjustStat(uint stat); //切換平衡調(diào)節(jié)模式 不調(diào)節(jié)/原地調(diào)節(jié)/行進間調(diào)節(jié) void readGyroSerial(); //讀取陀螺儀串口消息 void adjustAct(); //平衡調(diào)節(jié)動作 /****** 腿部動作相關(guān)函數(shù) *****/ void setTurnLeftFlag(bool flag); //修改左轉(zhuǎn)狀態(tài)標(biāo)志位 void setTurnRightFlag(bool flag); //修改右轉(zhuǎn)狀態(tài)標(biāo)志位 void leg1(); //更新1號腿(左前)位置 void leg2(); //更新2號腿(左后)位置 void leg3(); //更新3號腿(右前)位置 void leg4(); //更新4號腿(右后)位置 bool calc(Point3d p, bool leg1, bool leg2, bool leg3, bool leg4); //逆解計算函數(shù) /***** 整機動作相關(guān)函數(shù) *****/ void dogReset(Point3d initPos, uint waitTime); //復(fù)位動作 void dogInit(); //初始化動作 void upDown(float x, float y, float z1, float z2, uint times); //蹲起動作 void drawCircle(float ox, float oy, float z, float r, uint times); //原地圓形擺動動作 void stepping(float x, float y, float z1, float z2, uint times); // 原地踏步動作 void liftShoulder(uint height, uint times); //原地擺臂動作 //動作周期計數(shù)器 int cycleCount; //復(fù)位計數(shù)器 void resetCycleCount() { cycleCount = -1; } void updateCycleCount() { cycleCount++; } //當(dāng)前運動狀態(tài) dogMode currentMode; //切換運動狀態(tài) void setMode(dogMode mode) { if (mode == currentMode) return; if (mode == DOG_MODE_TURN_LEFT) { setTurnLeftFlag(true); setTurnRightFlag(false); } else if (mode == DOG_MODE_TURN_RIGHT) { setTurnLeftFlag(false); setTurnRightFlag(true); } else { setTurnLeftFlag(false); setTurnRightFlag(false); } if (mode == DOG_MODE_BACK) //后退時關(guān)閉紅外傳感器 { disableIR(); } else if (mode == DOG_MODE_STOP) //靜止后開始原地姿態(tài)調(diào)節(jié) { switchAdjustStat(ADJUST_STAT_LEG); dogReset({0, 0, Leg_Init_Z_Pos}, 200); } currentMode = mode; } void updateMode() { if (cycleCount == MOTION_TIMES + 1) setMode(DOG_MODE_BACK); if (cycleCount == 3 * MOTION_TIMES) setMode(DOG_MODE_LEFT); if (cycleCount == 4 * MOTION_TIMES) setMode(DOG_MODE_RIGHT); if (cycleCount == 5 * MOTION_TIMES) setMode(DOG_MODE_RIGHT_FRONT); if (cycleCount == 6 * MOTION_TIMES) setMode(DOG_MODE_RIGHT_BACK); if (cycleCount == 7 * MOTION_TIMES) setMode(DOG_MODE_LEFT_BACK); if (cycleCount == 8 * MOTION_TIMES) setMode(DOG_MODE_LEFT_FRONT); if (cycleCount == 9 * MOTION_TIMES) setMode(DOG_MODE_TURN_LEFT); if (cycleCount == 10 * MOTION_TIMES) setMode(DOG_MODE_TURN_RIGHT); if (cycleCount == 11 * MOTION_TIMES) setMode(DOG_MODE_STOP); } void setup() { //陀螺儀連接串口,波特率115200 Serial.begin(115200); //舵機驅(qū)動板初始化 Tlc.init(0); tlc_initServos(); // Note: this will drop the PWM freqency down to 50Hz. //紅外傳感器初始化 IRInit(); //大狗身體初始化 dogInit(); //原地擺臂動作一次 liftShoulder(40, 1); delay(500); //原地做圓形擺動3周 drawCircle(0, 0, -120, 60, 3); delay(500); //原地蹲起3次 upDown(0, 0, -160, -90, 3); delay(500); //原地踏步6次 stepping(0, 0, -150, -100, 6); delay(500); resetCycleCount(); enableIR(); switchAdjustStat(ADJUST_STAT_TRACK); setMode(DOG_MODE_FRONT); } void loop() { //姿態(tài)調(diào)節(jié) adjustAct(); if (currentMode == DOG_MODE_STOP) return; //靜止模式不進行后續(xù)動作 updateMode(); //切換運動模式 //計算4條腿運動位置 leg1(); leg4(); leg2(); leg3(); //更新所有舵機位置 Tlc.update(); //檢測紅外傳感器信息 updateIR(); } //串口與陀螺儀通信 void serialEvent() { readGyroSerial(); } 審核編輯 黃宇
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器狗
+關(guān)注
關(guān)注
3文章
176瀏覽量
10489
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
通過肩部動作操控機器人
在6月6日舉行的2018年以色列教育科技峰會上,特拉維夫大學(xué)學(xué)生展示人機接口研發(fā)進展。學(xué)生通過肩部動作操控桌上的機器人舉手、行走和轉(zhuǎn)向。相關(guān)儀器通過學(xué)生身上傳感器,不僅能將肢體動作信號
發(fā)表于 11-09 16:01
ANYmal機器人具有腿和腳,可跨越障礙物
ANYmal機器人的實驗版本具有腿和腳,蘇黎世聯(lián)邦理工學(xué)院步行,有腿的機器人可能擅長于越過障礙物,但車輪在光滑地面上行駛?cè)匀桓行省_@就是蘇黎世聯(lián)邦理工學(xué)院的工程師向其現(xiàn)有的ANYm
發(fā)表于 08-30 08:02
波士頓機器狗電機控制相關(guān)資料推薦
開始接觸到像波士頓機器狗這樣的項目一只狗12個電機4條腿每個腿上3個1個是控制胯轉(zhuǎn)動1個控制大腿也就是整條腿動的1個是控制小腿打彎的主控用l
發(fā)表于 09-03 06:25
一只完全由PCB制造的智能機器狗
得不切割 PCB自己用卷軸鋸(或類似工具),但這不會花費你超過幾個小時。智能機器狗展示PS:在發(fā)布這個項目的時候,我沒有一個好的可靠的代碼可以在這個機器人上使用,所以我不會分享它,但我
發(fā)表于 07-05 06:16
小米機器狗二代來了,比上一代更瘦、更快、更強!NVIDIA主控+全志MR813+全志R329協(xié)處理器
能看、能聽、能感知,CyberDog2確實如雷軍所調(diào)侃的那樣,它比從前“更狗了”。
在剛剛結(jié)束的秋季新品發(fā)布會上,小米發(fā)布了最新的仿生四足機器人CyberDog2,雖然沒有在發(fā)布會現(xiàn)場進行實物展示
發(fā)表于 09-06 09:39
波士頓動力對機器狗進行了更新?lián)Q代——能夠感應(yīng)人體動作進行模仿
如機器狗的設(shè)計與發(fā)明,就是一項大膽的創(chuàng)新,近期波士頓動力又搞了一個神秘的測試,這款新型機器狗進行了更新?lián)Q代,不僅保留著初代機器
腿+輪式動力!瑞士四足機器人展示最佳混合步態(tài)、運動更靈活
腿+輪式動力!瑞士四足機器人ANYmal展示最佳混合步態(tài),運動更靈活,機器人,四足機器人,步態(tài),輪子,車輪
發(fā)表于 02-20 13:44
?2668次閱讀
波士頓動力機器狗學(xué)會了“三狗一組”跳大繩
跳完集體舞、引得馬斯克贊嘆不已后,波士頓動力的機器狗Spot,又有了新才藝。 安裝了機械臂的Spot Arm,甚至學(xué)會了“三狗一組”跳大繩: 起跳動作,對于
波士頓動力Spot機器狗獲新技能:玩跳繩游戲
據(jù)外媒CNET報道,波士頓動力公司的Spot機器狗已經(jīng)擁有跳舞、探索礦井及幫助醫(yī)療工作者等多項技能。而Spot機器狗正在不斷學(xué)習(xí)新的技巧,現(xiàn)在它們有了一個機械臂和一個新的編程界面,有了

瑞士蘇黎世聯(lián)邦理工學(xué)院新型四足機器人單腿完成開關(guān)門、移動任務(wù)
據(jù)本周五出版的Popular Science雜志報道,近日瑞士蘇黎世聯(lián)邦理工學(xué)院機器人系統(tǒng)實驗室的科研團隊展示了新研究進展:他們訓(xùn)練了自家的機器狗,讓其用單
為什么四足機器人設(shè)計常借鑒狗的外形特征?
劉表示,機器狗是機器人的一部分,被稱為“四足動物”,意思很明顯是“四條腿”。四足機器人之所以多數(shù)被設(shè)計為
發(fā)表于 04-10 14:30
?745次閱讀





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論