") KUKA大眾標(biāo)準與標(biāo)準版機器人程序的不同
KUKA大眾標(biāo)準與標(biāo)準版機器人程序的不同
大眾版KUKA程序使用的程序包括SRC和Dat文件
在程序中DAT文件保存機器人軌跡程序.
運動軌跡的添加:
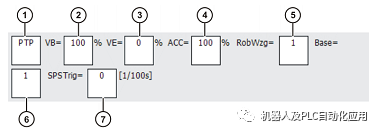
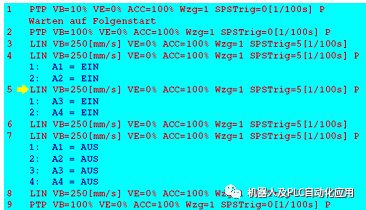
軌跡點的解析例子:
;FOLDPTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
軌跡程序條 ;%{P}%MKUKATPVW,%CMOVE8,%VPTP,%P 1:1, 2: VB=, 3:100, 4:%, 5: VE=, 6:100, 7:%, 8: ACC=, 9:100, 10:%, 11: RobWzg=, 12:1, 13: Base=, 14:1, 15: SPSTrig=, 16:0, 17:[1/100s], 18: P, 19:3, 20:-1, 21:3
;FOLD1: FB PSPS = M30 & M95 & E51 & E54 & E68 & E74 & E77 & E80
軌跡程序帶的SPS程序
在DATA文件中設(shè)置PX_D/PX : PX_D/PX會在生成軌跡條時自動順序生成.
DECL VW_MPARA_TYP P3_D = {TOOL_NO 1,BASE_NO 1,VB 100,VE 100,ACC 100,TRG_TIME 0,MOVE_TYPE #PTP_MOTION}
P3_D運動類型信息.
DECL E6POS P3 = {X -2261.878, Y 1657.231, Z 1827.533, A -61.29961, B -8.430642, C 92.4705, S 2, T 34 , E1 75.0, E2 0.0, E3 0.0, E4 0.0, E5 0.0, E6 0.0}
P3坐標(biāo)位置變量.;%{SE}%MKUKATPVW %CVW_SPS %VFBPSPS %P 2:FB PSPS = M30 & M95 & E51 & E54 & E68 & E74 & E77 & E80,3:FBPSPS
;ENDFOLD
;FOLD實際程序:
VW_MPARA_ACT=P3_D
Act_P1= P3 存儲軌跡變量到 Act_P1
Act_P2= P3 存儲軌跡變量到 Act_P2
VW(#MPARA,TRUE)執(zhí)行運動模式的控制
SPS_FERTIG=FALSE
TRIGGER WHEN DISTANCE=1 DELAY=0 DO SPS_TRIG(10003) PRIO=-1
-----執(zhí)行SPS程序-----
PTP P3 C_PTP C_VEL -----執(zhí)行軌跡
而很多KUKA標(biāo)準程序中是不使用DAT文件的一個變量可以控制很多條機器人軌跡.或者軌跡變量可以反復(fù)的賦值,這是在大眾版本的機器人程序中不可能實現(xiàn)的!
例如:
這是一段KUKA的普通標(biāo)準程序,他可以共用一個軌跡變量W13. 可是在大眾標(biāo)準中是不允許的!
;FOLDSLIN W13 Vel=1.0 m/s CPDAT7 Tool[1]:tool1 Base[0] 位置變量W13;%{PE}%R 8.3.40,%MKUKATPBASIS,%CSPLINE,%VSLIN_SB,%P 1:SLIN_SB, 2:w13, 3:, 5:0.2, 7:CPDAT7
SLINXW13 WITH $VEL=SVEL_CP( 1.0, , LCPDAT7), $TOOL=STOOL2( Fw13), $BASE= SBASE( Fw13.BASE_NO),$IPO_MODE=SIPO_MODE( Fw13.IPO_FRAME), $LOAD=SLOAD( Fw13.TOOL_NO), $ACC=SACC_CP( LCPDAT7), $ORI_TYPE=SORI_TYP( LCPDAT7), $JERK=SJERK( LCPDAT7)
;ENDFOLD
XW13.X= ClawPose.X
XW13.Y= ClawPose.Y
XW13.Z= ClawPose.Z
XW13.A= ClawPose.A
XW13.B= ClawPose.B
XW13.C= ClawPose.C
;FOLDSLIN W13 Vel=1.0 m/s CPDAT7 Tool[1]:tool1 Base[0]位置變量W13
-
機器人
+關(guān)注
關(guān)注
213文章
29446瀏覽量
211401 -
程序
+關(guān)注
關(guān)注
117文章
3819瀏覽量
82352 -
大眾
+關(guān)注
關(guān)注
1文章
791瀏覽量
34308 -
KUKA
+關(guān)注
關(guān)注
3文章
218瀏覽量
16875
原文標(biāo)題:KUKA大眾標(biāo)準與標(biāo)準版機器人程序的不同!
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
機器人、協(xié)作機器人和移動機器人,你分的清楚嗎
工業(yè)機器人的末端關(guān)節(jié)旋轉(zhuǎn)該精確控制?
KUKA機器人問題解答
庫卡KUKA機器人四種啟動方式介紹
KUKA庫卡機器人伺服驅(qū)動器相關(guān)型號舉例
KUKA焊接機器人伺服電機常見故障及維修處理
工業(yè)機器人組成結(jié)構(gòu)相關(guān)資料分享
庫卡機器人MGV電源模塊維修
KUKA機器人伺服驅(qū)動模塊維修
沒有有前輩用LabVIEW控制kuka機器人c2的經(jīng)驗?通訊是怎么做到的?
控制KUKA安全機器人的PLC標(biāo)準功能塊FB 292






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論