") Verilog中跨模塊調用的兩種不同方式的優(yōu)缺點討論
Verilog中跨模塊調用的兩種不同方式的優(yōu)缺點討論
在寫Verilog TestBench,為了更方便更抽象地對底層模塊內部的信號進行控制,經(jīng)常會使用到跨模塊調用的方式,這個就叫做Cross Module Reference,縮寫為XMR。
本文就XMR的兩種方式做介紹,涉及部分基礎的Verilog 知識。
在TB當中,直接對DUT(Design under Test)的信號進行讀寫是很常見的操作。以一個簡單的計數(shù)器例子為例:
定義一個模塊名為a(取名比較隨意),功能是帶使能和異步復位的計數(shù)器,描述如下:
reg [31:0] cnt_r;
assign count = cnt_r;
always @ (posedge clk or posedge rst)
begin
if (rst)
cnt_r <= 'd0;
else if (en)
cnt_r <= count + 32'd1;
end
同時定義一個模塊名為b,功能是帶使能、置位和異步復位的計數(shù)器,描述如下:
reg [31:0] cnt_r;
assign count = cnt_r;
always @ (posedge clk or posedge rst)
begin
if (rst)
cnt_r <= 'd0;
else if (set)
cnt_r <= load_val;
else if (en)
cnt_r <= count + 32'd1;
end
同時創(chuàng)建一個wrapper將模塊b例化,并在TB中完成簡單的測試工作:
`include "macros.v"
module tb;
reg clk ;
reg rst ;
reg en ;
reg set ;
wire [31:0] a_cnt;
wire [31:0] b_cnt;
wire [31:0] b_cnt1;
initial begin
clk = 0;
rst = 1;
en = 0;
set = 0;
#100
rst = 0;
#100
en = 1;
#100
set = 1;
#20
set = 0;
#100
$finish;
end
always #10 clk = ~clk;
initial
forever begin
#20
$display("Time: %t A_CNT: %d B_CNT:%d", $time, `A_MODULE_INST.count, `B_MODULE_NAME.count);
end
a a_inst(
.clk(clk) ,
.rst(rst) ,
.en (en) ,
.count (a_cnt)
);
b_wrapper b_inst(
.clk(clk) ,
.rst(rst) ,
.set(set) ,
.load_val(32'd20),
.en(en) ,
.count (b_cnt)
);
`ifdef B_MULT
b_wrapper b_inst_1(
.clk(clk) ,
.rst(rst) ,
.set(set) ,
.load_val(32'd40),
.en(en) ,
.count (b_cnt1)
);
`endif
endmodule
a和b模塊的XMR調用通過宏定義控制,在tb的display函數(shù)中使用。宏定義內容如下:
`define A_MODULE_INST tb.a_inst
`define B_MODULE_NAME b
//`define B_MULT
所以整體的層次結構如下:
- tb
- a_inst (module a)
- b_inst (module b_wrapper)
- b_inst (module b)
- b_inst_1 (module b_wrapper if define B_MULT)
- b_inst (module b)
Hierarchical Reference
可以看到,a模塊的XMR方式是從頂層的tb開始,根據(jù)Instance name找到的例化的a模塊;這種根據(jù)結構和Instance Name跨模塊調用的方式叫做Hierarchical Reference, 這也是最常見的方式。
優(yōu)缺點如下:
- 在Verilog的一個module中,Instance Name是唯一的,所以該種方式指向性很明確,支持精細化地控制同一個module例化的不同模塊信號。
- 但如果層次結構發(fā)生變化,或者Instance Name改變,會爆出Cross Module Reference Error。
Upwards Name Referencing
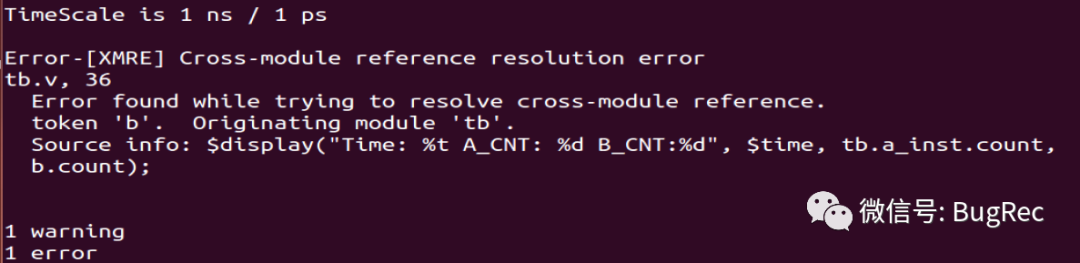
b模塊的XMR方式則是直接定義了b模塊的模塊名,然后verilog開始從定義的頂層開始查找,沒找到就進入下一層繼續(xù)尋找,直到找到唯一的那個模塊名匹配的為止:
它的優(yōu)缺點與Hierarchical Reference正好相反:
- 不用擔心層次結構和Instance Name的變化會影響跨模塊調用。
- 使用該方式需要保證唯一性,不然也會爆出Cross Module Reference Error。
實驗結果如下:
在未定義B_MULT時:
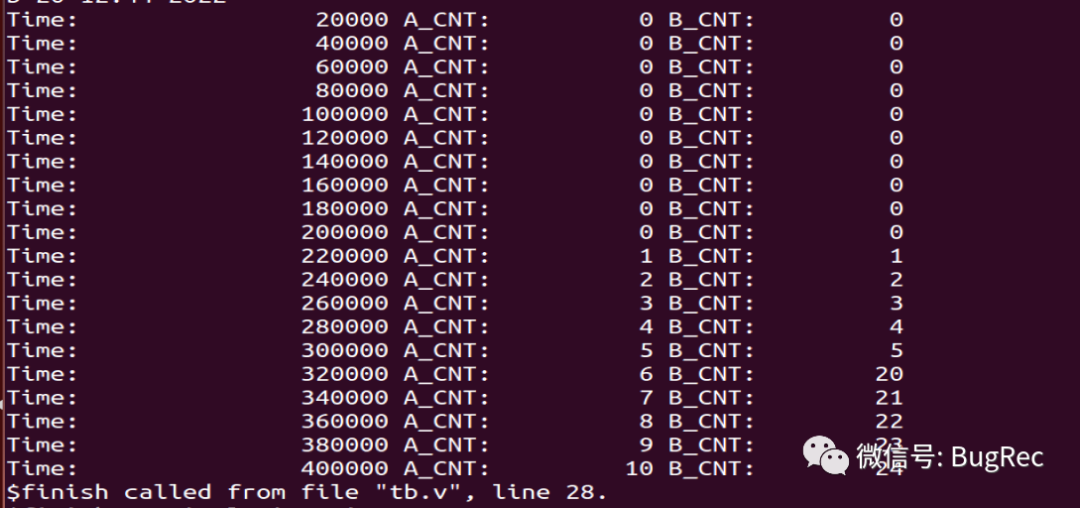
定義B_MULT時:
總結:
Hierarchical Reference方式嚴謹?shù)珶o靈活性,操作上可實現(xiàn)精細化控制,支持多模塊;Upwards Name Referencing方式靈活,但只支持單模塊,應用場景限制高。
所以,這也是Hierarchical Reference應用廣泛的原因吧,如果不是最近犯錯,我可能都不會注意到另一種XMR方式。
-
Verilog
+關注
關注
28文章
1365瀏覽量
111749 -
DUT
+關注
關注
0文章
190瀏覽量
12818
發(fā)布評論請先 登錄
verilog模塊的調用、任務和函數(shù)
請問C6748下的兩種DSP開發(fā)方式有什么區(qū)別
請問小車轉向兩種方式有什么優(yōu)缺點?
Net模塊中的通信傳輸協(xié)議有何優(yōu)缺點
DC-DC和LDO兩種供電模式有什么優(yōu)缺點?
對兩種左右手傳輸線實現(xiàn)方式的研究現(xiàn)狀進行了深入分析以及優(yōu)缺點對比
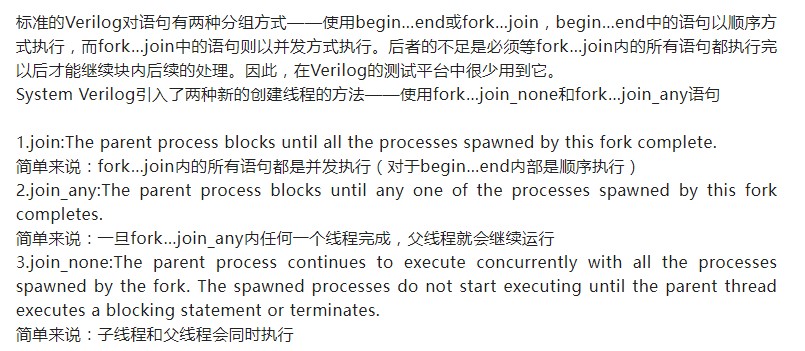
淺析標準的Verilog對語句有兩種分組方式
在MATLAB/simulink中建模時的兩種不同實現(xiàn)方式
MATLAB/simulink中兩種實現(xiàn)建模方式的優(yōu)勢
Verilog中跨模塊調用的兩種不同方式的優(yōu)缺點討論

兩種用于汽車PCB組件的連接器端子組件的優(yōu)缺點






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論