") Nullmax打造一套強大的平臺化BEV-AI整體技術(shù)架構(gòu)
Nullmax打造一套強大的平臺化BEV-AI整體技術(shù)架構(gòu)
在高階智能駕駛不斷上車的今天,行泊一體已經(jīng)成為了汽車行業(yè)的量產(chǎn)共識,如何在實現(xiàn)極致性能體驗的同時,進一步降低硬件成本,并且大幅提升開發(fā)部署的效率,是行泊一體加速落地的關(guān)鍵。
傳統(tǒng)的行泊一體方案,行泊功能一般來自兩套系統(tǒng),芯片、傳感器各為陣營,不僅性能受限,也帶來了多余的硬件成本。面向當(dāng)下和未來,行泊一體顯然需要更加「現(xiàn)代化」的深度融合:傳感器深度復(fù)用,芯片資源完全共享,并通過強大的軟件算法實現(xiàn)功能的整合升級。而這,也對底層的技術(shù)架構(gòu)提出了更高要求。
這套架構(gòu)既要能夠支持行車、泊車的各種傳感器,基于單顆SOC為主的域控制器打造功能完整的行泊一體應(yīng)用,還要提供豐富多樣的算法選擇,滿足不同算力和算子情況下的各種行車、泊車任務(wù)要求,最好還能實現(xiàn)充分的技術(shù)共用和模塊復(fù)用,讓所有方案的開發(fā)、部署和升級變得高效便捷。
為此,Nullmax打造了這樣一套強大的平臺化BEV-AI整體技術(shù)架構(gòu),為「現(xiàn)代化」的全場景行泊一體應(yīng)用提供至關(guān)重要的技術(shù)支撐,推動高階智駕加速走向普及。
自動駕駛「新基建」
在智能駕駛時代,汽車最明顯的標(biāo)志是硬件的變化,更高算力的芯片、更多數(shù)量的傳感器,通常意味著更大的智能化潛力。這些硬件如同自動駕駛功能的基礎(chǔ)設(shè)施,而用來驅(qū)動這些硬件高效協(xié)同并提供豐富功能的BEV-AI技術(shù)架構(gòu),就是自動駕駛的「新基建」工程。
對于自動駕駛來說,感知是整個系統(tǒng)的最上游,當(dāng)傳感器的類型和數(shù)量顯著增加時,如何融合所有傳感器持續(xù)輸入的多模態(tài)、不同視角數(shù)據(jù),并實時輸出下游所需的一系列任務(wù)結(jié)果,是自動駕駛的核心問題。并且在應(yīng)用中,感知環(huán)節(jié)常常會消耗掉車上的大部份算力,所以感知其實也是技術(shù)架構(gòu)的核心所在。
在感知環(huán)節(jié),系統(tǒng)需要融合不同視角相機的視覺數(shù)據(jù),以及毫米波雷達、激光雷達等傳感器的數(shù)據(jù),在模型設(shè)計和工程實現(xiàn)上都具有很大挑戰(zhàn)。常規(guī)的后融合處理方式,每個傳感器對應(yīng)一個神經(jīng)網(wǎng)絡(luò),無法充分挖掘多傳感器融合的優(yōu)勢,而且計算量大、耗時長。此外,如果多個任務(wù)簡單地共享一個主干網(wǎng)絡(luò),則容易出現(xiàn)各個任務(wù)難以同時獲得優(yōu)異性能的情況。
所以在2020年,Nullmax構(gòu)建了基于BEV的感知基礎(chǔ)架構(gòu),為自動駕駛提供融合更準(zhǔn)、速度更快的感知模型。它可以有效融合空間和時序信息,對360度的多傳感器數(shù)據(jù)進行高效融合,也能自動搜尋最優(yōu)的網(wǎng)絡(luò)設(shè)計,支持多傳感器、多任務(wù)的協(xié)同工作。
并且在2022年,Nullmax應(yīng)用BEV-Transformer完成了這套架構(gòu)的改造升級,形成了平臺化的BEV-AI自動駕駛整體技術(shù)架構(gòu)。它在技術(shù)底層考慮行車、泊車的特點,將任務(wù)范圍從感知延伸到下游的規(guī)劃,提供全場景、端到端、可成長的完整應(yīng)用。
在深入使用Transformer基礎(chǔ)上,Nullmax BEV-AI技術(shù)架構(gòu)還整合了大量BEV-CNN的成果,能在面向不同算力、算子的多核異構(gòu)SOC時能夠提供最優(yōu)的算法選擇。它可同時輸出3D和2D的感知結(jié)果,既能為紅綠燈檢測等適合2D感知的任務(wù)提供2D輸出,也可以為動態(tài)障礙物檢測等任務(wù)輸出3D結(jié)果,然后用進行2D校驗,在系統(tǒng)層面形成魯棒的設(shè)計。
基于這套先進的BEV-AI整體技術(shù)架構(gòu),Nullmax可以快速完成各項功能和任務(wù)的開發(fā),并形成一套性能拔尖、易于部署、持續(xù)升級的一體化量產(chǎn)方案。
面面俱到的完整BEV架構(gòu)
為了滿足自動駕駛?cè)湹拈_發(fā)迭代需求,Nullmax的BEV-AI架構(gòu)涵蓋了六個方面的主要內(nèi)容:BEV 3D車道線檢測,BEV 3D目標(biāo)檢測,BEV局部地圖,BEV規(guī)劃,云端自動化4D真值標(biāo)注,車端感知、預(yù)測、規(guī)劃的量產(chǎn)部署。 復(fù)雜路口的BEV 3D目標(biāo)檢測 BEV 3D目標(biāo)檢測為自動駕駛提供360°的動態(tài)障礙物檢測能力,并融合時序信息對各類目標(biāo)進行準(zhǔn)確預(yù)測。BEV 3D車道線檢測為車輛輸出實時的車道情況,BEV局部地圖在車端實時構(gòu)建媲美高精地圖的高精度局部地圖,二者能夠在任意常規(guī)道路條件下,輸出自動駕駛所需的靜態(tài)場景深刻理解。然后以此為基礎(chǔ),BEV規(guī)劃可以用端到端方式輸出行車的軌跡和速度,實現(xiàn)復(fù)雜場景下的自動駕駛應(yīng)用,而不依賴高精地圖。 路口場景的BEV規(guī)劃
云端的自動化4D真值標(biāo)注,用來完成3D空間信息+時間信息的3D bunding-box真值標(biāo)注,以及車道線、Local Map等方面的標(biāo)注,支持BEV-AI的高效開發(fā)和迭代。最終,Nullmax BEV-AI整體架構(gòu)根據(jù)實際需求,形成能在車端實時運行、易于部署的感知、預(yù)測、規(guī)劃一系列量產(chǎn)應(yīng)用。
為了讓這套BEV-AI技術(shù)架構(gòu)具備平臺化特點,滿足實際應(yīng)用中的不同量產(chǎn)需求,Nullmax還攻克了三個方面的難點。一是融合多個攝像頭數(shù)據(jù)的同時,不進行單個攝像頭的獨自處理和多個攝像頭結(jié)果的復(fù)雜后處理,以節(jié)省算力、提升融合效果;二是在算法層面實現(xiàn)圖像空間到BEV空間的信息轉(zhuǎn)換;三是支持任意攝像頭,且不過度依賴相機的外參,從而適配所有傳感配置。
簡單來說,Nullmax的BEV-AI,采取多相機聯(lián)合工作方式,輸入任意數(shù)量相機的圖像,直接統(tǒng)一輸出BEV視角下的三維信息,因而無需為每個相機進行單獨的處理。同時,Nullmax利用cross-attention機制實現(xiàn)2D圖像到3D空間的關(guān)聯(lián),為BEV-AI架構(gòu)打造了一系列基于Transformer的BEV檢測、分割方法,并通過multi-camera cross attention等方式,實現(xiàn)了不過度依賴相機參數(shù)的2D和3D關(guān)聯(lián)。
歸功于這些深入的工作,Nullmax的BEV-AI技術(shù)架構(gòu)為行泊一體等量產(chǎn)應(yīng)用帶來了巨大的平臺化優(yōu)勢和產(chǎn)品優(yōu)勢。
大幅提升的BEV量產(chǎn)優(yōu)勢
在實際應(yīng)用中,芯片平臺、傳感器配置、功能定義、技術(shù)指標(biāo)的細(xì)微差異,都可能會為自動駕駛的開發(fā)工作帶來巨大變動,尤其是復(fù)雜的行泊一體量產(chǎn)應(yīng)用。因此通過平臺化的技術(shù)架構(gòu)提升量產(chǎn)效率,意義重大。
Nullmax BEV-AI架構(gòu)能夠支持所有的芯片平臺,提供高中低不同算力平臺下的行泊一體量產(chǎn)應(yīng)用。尤其是在備受歡迎的德州儀器TDA4、英偉達Orin芯片上,基于BEV-AI技術(shù)架構(gòu)的行泊一體方案,有的已經(jīng)完成交付,有的正在交付。
在最低8T算力的情況下,BEV-AI就可以實現(xiàn)包括高速NOA在內(nèi)的基礎(chǔ)行泊一體,如果算力達到16T,那么行泊車體驗還會進一步升級。當(dāng)算力達到100T以上,那么BEV-AI架構(gòu)可以提供城市道路的領(lǐng)航輔助功能,實現(xiàn)全場景的行泊一體。
同時,Nullmax BEV-AI架構(gòu)還能夠支持所有的自動駕駛產(chǎn)品。無論是完整的行泊一體,還是單獨的行車、泊車功能,又或者是上游的行泊車感知,BEV-AI架構(gòu)能夠按需裁剪,適配任務(wù)需求,并且可以支持任意的傳感器配置。
夜間基于8T算力和4顆側(cè)視相機的BEV周視感知
通常來說,不同的車輛在傳感器的類型、數(shù)量和參數(shù)上會存在普遍差異,比如相機的焦距、像素、FOV、安裝位置、朝向等情況就各不相同。Nullmax的BEV-AI架構(gòu)可以適配這些傳感器層面的差異,無需大幅修改算法,即可提供應(yīng)用。
除此之外,Nullmax BEV-AI架構(gòu)還具有平臺產(chǎn)品化的特點,讓架構(gòu)平臺的技術(shù)優(yōu)勢形成了面向部署優(yōu)化、超遠(yuǎn)距離感知的產(chǎn)品優(yōu)點。這讓基于BEV-AI架構(gòu)的量產(chǎn)方案,在部署時能能取得更好的應(yīng)用體驗,并在資源占用、感知幀率、系統(tǒng)延時等關(guān)鍵指標(biāo)上表現(xiàn)更佳,尤其是面對中低算力芯片平臺的時候。
而且更遠(yuǎn)距離的感知,也能為自動駕駛提供更高的安全性。相比于業(yè)內(nèi)BEV方案通常數(shù)十米遠(yuǎn)的感知距離,Nullmax BEV-AI架構(gòu)可以輕松實現(xiàn)更遠(yuǎn)距離的有效感知,滿足量產(chǎn)功能的所有性能指標(biāo)。
正是憑借BEV-AI架構(gòu)在平臺化和產(chǎn)品化方面帶來的這些優(yōu)勢,Nullmax不僅快速完成了各種量產(chǎn)應(yīng)用的高質(zhì)量開發(fā)和交付,并且方案整體達到了行業(yè)領(lǐng)先的技術(shù)水準(zhǔn)。
結(jié)語
在汽車向著高階智駕發(fā)展的過程中,先進的技術(shù)架構(gòu)將為自動駕駛的落地帶來全方位的優(yōu)勢,不論是量產(chǎn)方案的本身還是技術(shù)應(yīng)用的過程,都不例外。Nullmax BEV-AI架構(gòu)將繼續(xù)作為行泊一體「現(xiàn)代化」路上的「新基建」,加速全場景自動駕駛應(yīng)用的落地。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52622瀏覽量
763938 -
硬件
+關(guān)注
關(guān)注
11文章
3461瀏覽量
67214 -
AI
+關(guān)注
關(guān)注
87文章
34306瀏覽量
275488 -
LLM
+關(guān)注
關(guān)注
1文章
320瀏覽量
688
原文標(biāo)題:Nullmax BEV-AI架構(gòu),加速行泊一體「現(xiàn)代化」 | Nullmax進化學(xué)
文章出處:【微信號:Nullmax,微信公眾號:Nullmax紐勱】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
用一套Linux系統(tǒng),撐起整個芯片設(shè)計平臺?CFA團隊教你如何搭好EDA智算平臺的技術(shù)底座
Nullmax亮相2025上海車展汽車智能化峰會

踐行普適價值、安全觸手可及,Nullmax攜全棧輔助駕駛方案首秀上海車展

首創(chuàng)開源架構(gòu),天璣AI開發(fā)套件讓端側(cè)AI模型接入得心應(yīng)手
Banana Pi 發(fā)布 BPI-AI2N & BPI-AI2N Carrier,助力 AI 計算與嵌入式開發(fā)
AI即服務(wù)平臺技術(shù)架構(gòu)
《AI Agent 應(yīng)用與項目實戰(zhàn)》第1-2章閱讀心得——理解Agent框架與Coze平臺的應(yīng)用
Nullmax接連斬獲多項行業(yè)殊榮
Nullmax多款智駕產(chǎn)品亮相CES 2025
黑芝麻智能與Nullmax發(fā)布量產(chǎn)級高階智駕功能
如何設(shè)計出一套用于移動式綜合監(jiān)測站管理的軟件系統(tǒng)
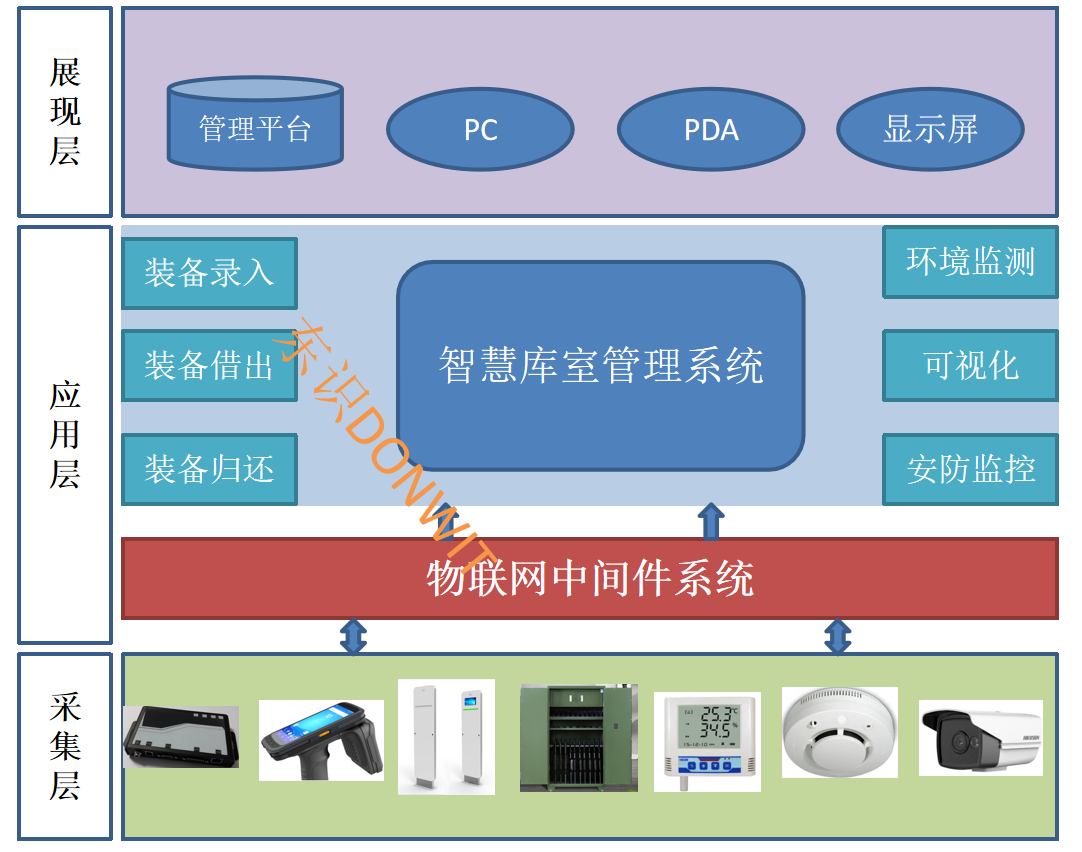
庫室聯(lián)管聯(lián)控系統(tǒng)DW-S306|是一套智能化系統(tǒng)
saas模式的一套智慧工地云平臺源碼,支持多端展示:PC端、大屏端、手機端、平板端

Nullmax正式推出新一代自動駕駛技術(shù)Nullmax Intelligence

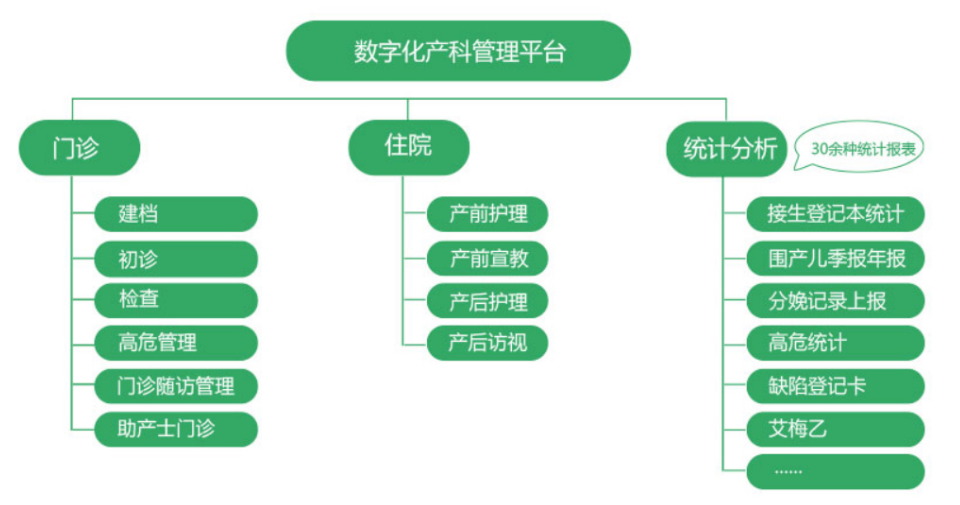
如何用java語言開發(fā)一套數(shù)字化產(chǎn)科系統(tǒng)? 數(shù)字化產(chǎn)科管理平臺源碼





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論