") 介紹Autosar網(wǎng)絡(luò)管理NM和其他模塊之間的對應(yīng)關(guān)系
介紹Autosar網(wǎng)絡(luò)管理NM和其他模塊之間的對應(yīng)關(guān)系
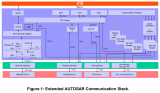
本篇主要介紹NM和其他模塊之間的對應(yīng)關(guān)系,如NM與ComM,CanSM,ECUM,BSWM之間的關(guān)系,因為CanNM是目前主要用到的NM模塊,下面就以CanNM為例。
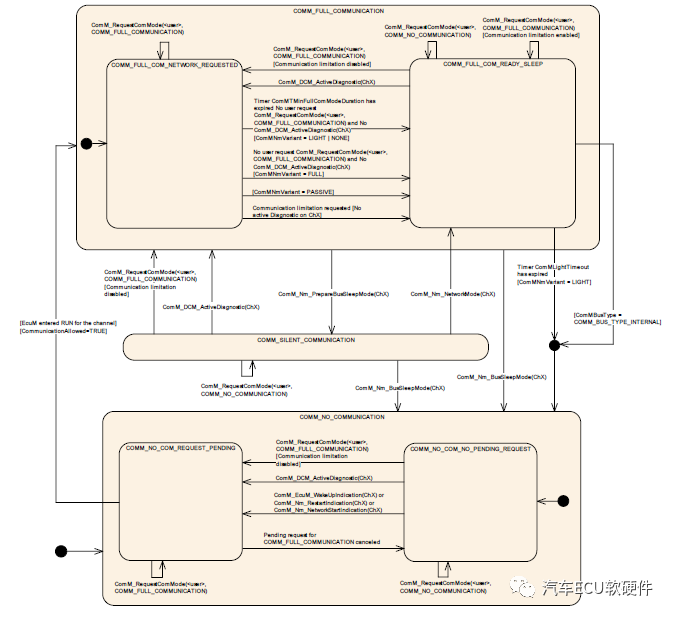
NM與ComM:
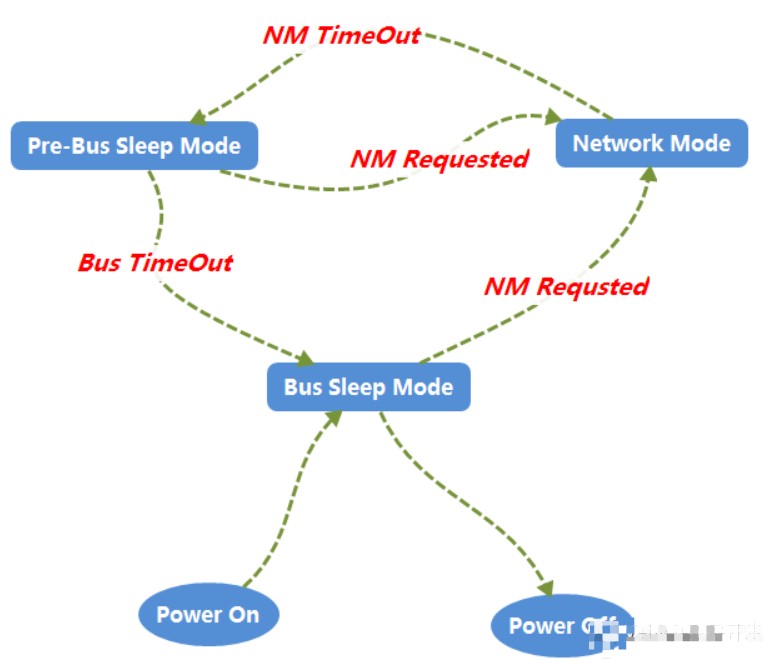
如果是網(wǎng)絡(luò)是主動喚醒,那么一般是由用戶調(diào)用ComM_networkrequest這個借口,請求ComM_Fullcommunication,使得ComM進入COMM_FULL_COM_NETWORK_REQUESTED,同時NM的狀態(tài)就會從Bus_Sleep進入到Repeat模式,而后再計入Normal模式。
如果網(wǎng)絡(luò)是被動喚醒,也就是由NM報文喚醒,那么NM會先由Bus_Sleep模式切換至Repeat模式,而NM會通知到ComM我已經(jīng)進入了網(wǎng)絡(luò)模式了,你也需要切換到Full_Communication了。
NM與EcuM:
這里很多初學者會搞混的一點就是Ecu喚醒和NM喚醒,這是兩個概念。
一般來說,報文喚醒了Ecu,但是NM可能還在睡眠狀態(tài),要看喚醒Ecu的是不是網(wǎng)絡(luò)管理報文。網(wǎng)絡(luò)管理報文通常也會有自己的ID,在指定的ID范圍內(nèi),就可以喚醒網(wǎng)絡(luò)。
另外一點就是,NM休眠和Ecu休眠也是兩個概念。Ecu在一定時間內(nèi)接受不到NM報文,是一定會休眠的,但是Ecu是否休眠,則完全由我們設(shè)計者來決定。
NM與CanSM:
我們說NM報文喚醒網(wǎng)絡(luò),首先Ecu需要具備接受NM報文的能力,這里說的就是Can控制器和收發(fā)器都必須處于能夠接受報文的狀態(tài),因為Can控制器也有自己的狀態(tài)機,收發(fā)器如TJA1041也具備自己的狀態(tài)機,所以如果你的Ecu已經(jīng)喚醒了,而且你也模擬向Ecu發(fā)送了網(wǎng)絡(luò)管理報文,但是NM還是處于休眠的狀態(tài),那就要檢查一下Can控制器和收發(fā)器的狀態(tài)。

-
收發(fā)器
+關(guān)注
關(guān)注
10文章
3612瀏覽量
107317 -
控制器
+關(guān)注
關(guān)注
114文章
16955瀏覽量
182772 -
AUTOSAR
+關(guān)注
關(guān)注
10文章
370瀏覽量
22380 -
ecu
+關(guān)注
關(guān)注
14文章
913瀏覽量
55423
發(fā)布評論請先 登錄
AUTOSAR CAN網(wǎng)絡(luò)管理
AUTOSAR CAN網(wǎng)絡(luò)管理狀態(tài)機介紹
介紹AUTOSAR支持的四種功能安全機制
AUTOSAR信息安全框架和關(guān)鍵技術(shù)相關(guān)資料介紹
AUTOSAR模式的FEE驅(qū)動程序可以與其他非AUTOSAR模式兼容嗎?
AUTOSAR_SWS_CAN網(wǎng)絡(luò)管理規(guī)范標準4.3.1
CAN網(wǎng)絡(luò)管理規(guī)范 AUTOSAR CP中文版
CAN網(wǎng)絡(luò)管理規(guī)范 AUTOSAR CP英文版
AUTOSAR CAN網(wǎng)絡(luò)管理協(xié)議
OSEK與AUTOSAR標準分別是怎么實現(xiàn)網(wǎng)絡(luò)管理功能的
AutoSAR中CAN通信網(wǎng)絡(luò)管理的概述
科普系列:AUTOSAR與OSEK網(wǎng)絡(luò)管理比較(下)

一文解析AUTOSAR CAN網(wǎng)絡(luò)管理
AUTOSAR UDP網(wǎng)絡(luò)管理策略





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論