") RA6T2無傳感器矢量控制應(yīng)用筆記 [3] 控制程序描述 (1)
RA6T2無傳感器矢量控制應(yīng)用筆記 [3] 控制程序描述 (1)
3. 控制程序描述
介紹本應(yīng)用筆記的目標(biāo)軟件。
3.1 控制的內(nèi)容
3.1.1 電機(jī)啟動/停止
電機(jī)的啟動和停止通過來自“Renesas Motor Workbench”或SW1的輸入控制。
為SW1指定一個通用端口,并根據(jù)其電平控制電機(jī)運(yùn)行。
“高”電平 à 電機(jī)啟動
“低”電平 à 電機(jī)停止
3.1.2 A/D轉(zhuǎn)換器
1
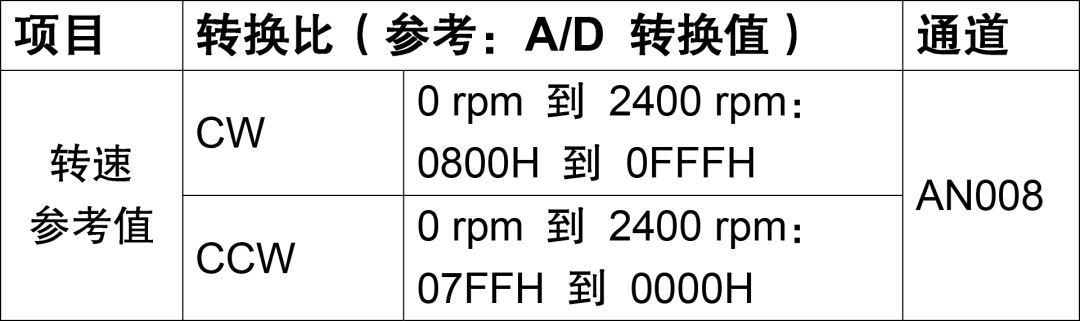
電機(jī)轉(zhuǎn)速參考值
電機(jī)的轉(zhuǎn)速命令值通過來自“Renesas Motor Workbench”的輸入或VR1的輸出值(模擬值)來確定。來自VR1的轉(zhuǎn)速命令值的測量如下表所示。
表3-1 轉(zhuǎn)速參考值的轉(zhuǎn)換比
2
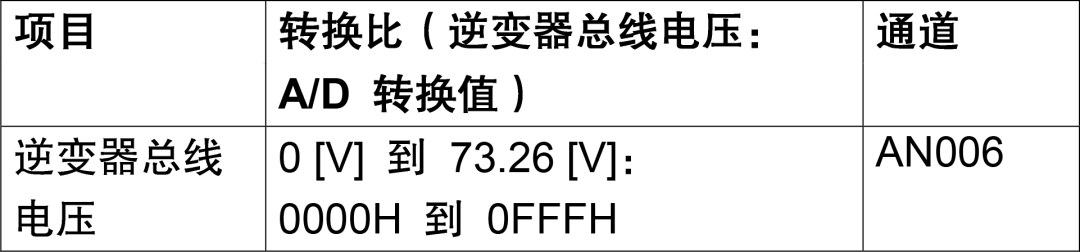
逆變器總線電壓
逆變器總線電壓的測量如下表所示。此電壓用于計算調(diào)制比以及過電壓和欠電壓檢測(出現(xiàn)異常時PWM停止)。
表3-2 逆變器總線電壓轉(zhuǎn)換比
3
單電阻時的相電流
相電流的測量如表3-3所示,用于矢量控制。
表3-3 相電流轉(zhuǎn)換比
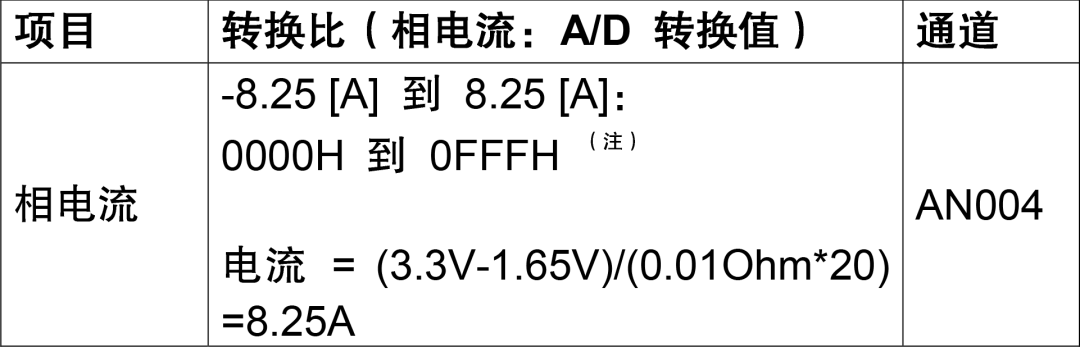
注:
有關(guān)A/D轉(zhuǎn)換特性的更多詳細(xì)信息,請參見“RA6T2系列用戶手冊:硬件”。
3.1.3 調(diào)制
本應(yīng)用筆記的目標(biāo)軟件采用脈寬調(diào)制(下文中稱為 PWM)來生成電機(jī)的輸入電壓。PWM波形通過三角波比較方法來生成。
1
三角波比較方法
三角波比較方法用于輸出電壓命令值。通過該方法,輸出電壓的脈寬可通過比較載波波形(三角波)與電壓命令值波形來確定。當(dāng)電壓命令值大于或小于載波波形時,可通過相應(yīng)接通或關(guān)斷開關(guān)的方法來輸出近似正弦波的電壓命令值。
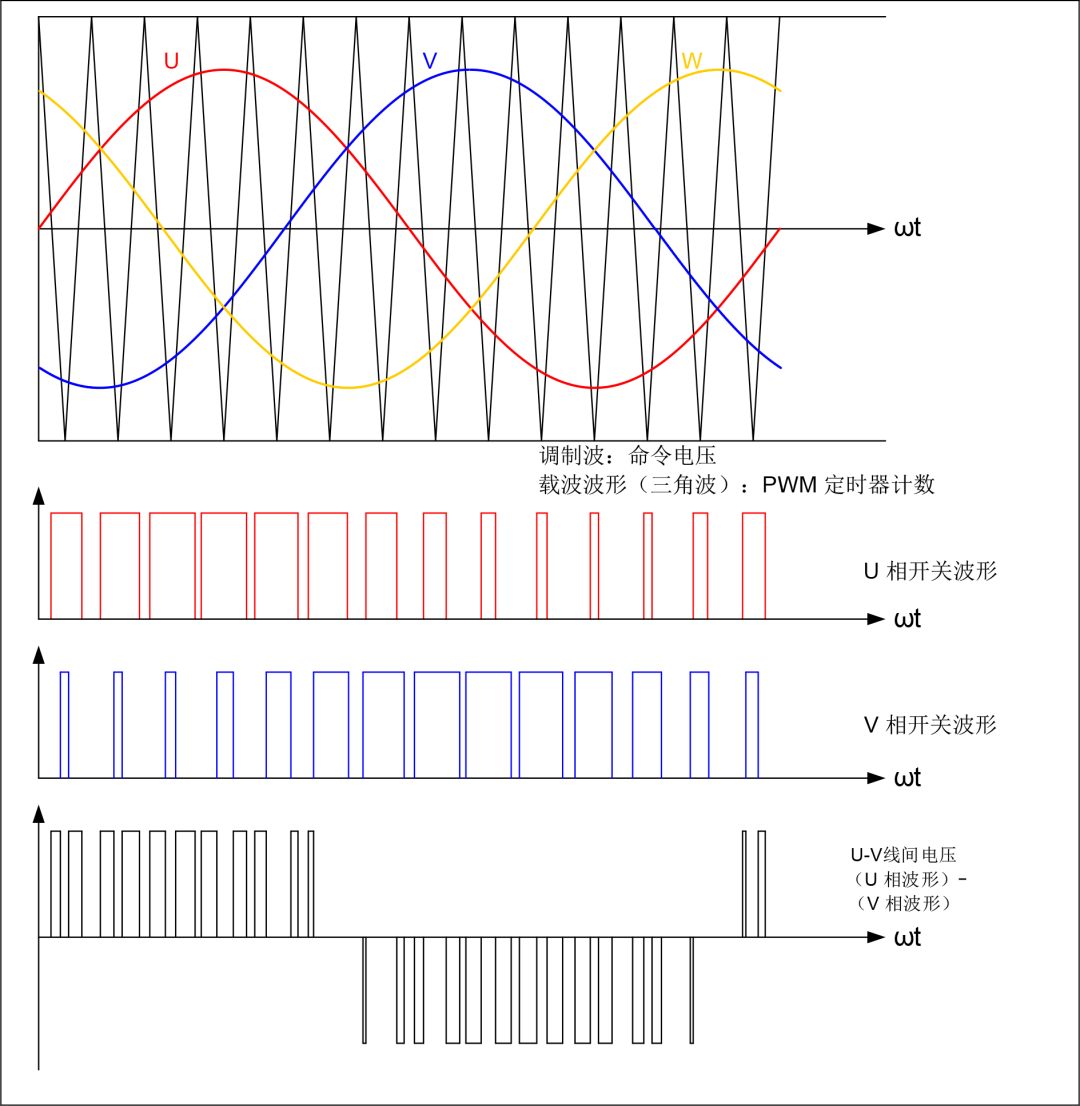
圖3-1 三角波比較方法概念圖
如圖3-2所示,輸出電壓脈沖時間與一個載波周期之比稱為占空比。
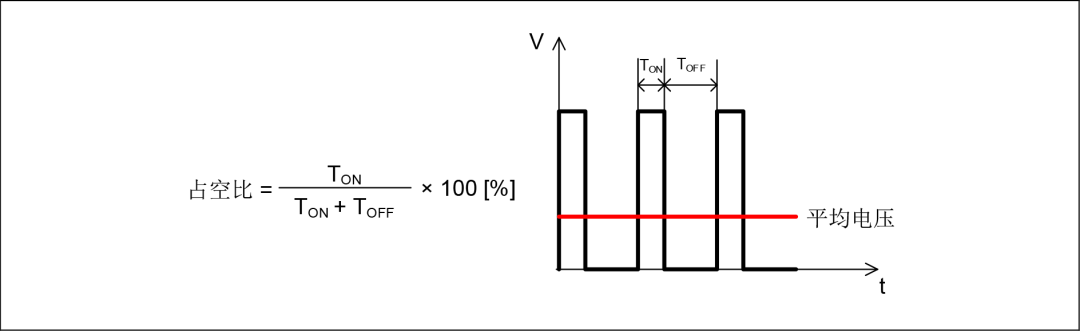
圖3-2 占空比定義
調(diào)制系數(shù)“m”定義如下。

所請求的控制可通過將此調(diào)制系數(shù)設(shè)置為確定PWM占空比的寄存器值來執(zhí)行。
3.1.4 狀態(tài)轉(zhuǎn)換
圖3-3是無傳感器矢量控制軟件的狀態(tài)轉(zhuǎn)換圖。在本應(yīng)用筆記的目標(biāo)軟件中,軟件狀態(tài)受“系統(tǒng)模式”控制。電機(jī)1和2的控制方法相同。
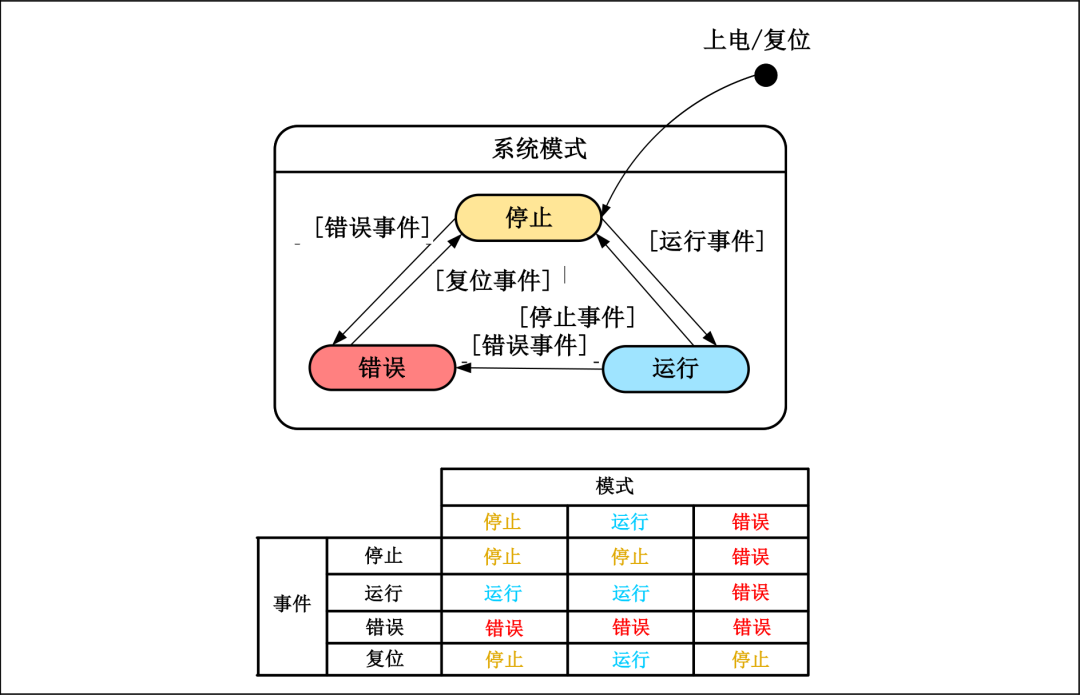
圖3-3 無傳感器矢量控制軟件的狀態(tài)轉(zhuǎn)換圖
1
系統(tǒng)模式
“系統(tǒng)模式”指示系統(tǒng)的運(yùn)行狀態(tài)。每當(dāng)有事件發(fā)生時,狀態(tài)都會轉(zhuǎn)換。“系統(tǒng)模式”具有3個狀態(tài):電機(jī)驅(qū)動停止(非活動)、電機(jī)驅(qū)動(活動)和異常狀況(錯誤)。
2
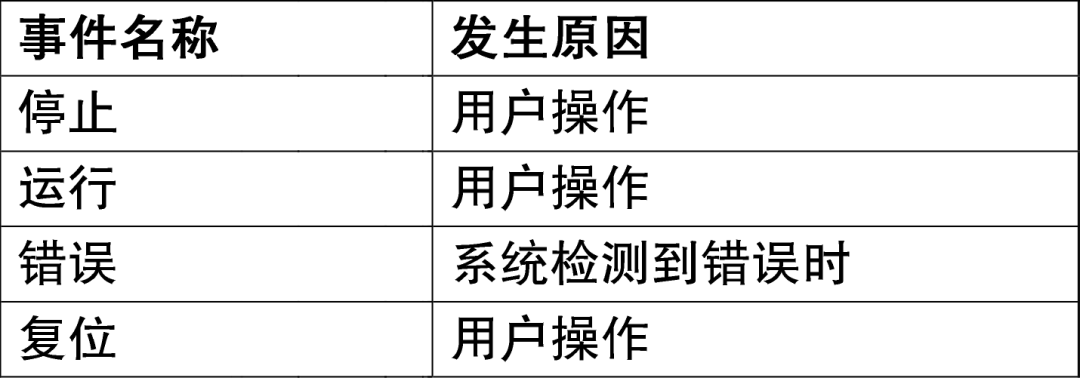
事件
在每種“系統(tǒng)模式”下有“事件”發(fā)生時,“系統(tǒng)模式”都會根據(jù)具體“事件”發(fā)生變化,如上圖3-3所示。各個事件的發(fā)生原因如下所示。
表3-4 事件列表
3.1.5 啟動方法
圖3-4顯示了無傳感器矢量控制軟件的啟動控制。每種模式均通過管理d軸電流、q軸電流和速度的各個參考值的標(biāo)記來控制。
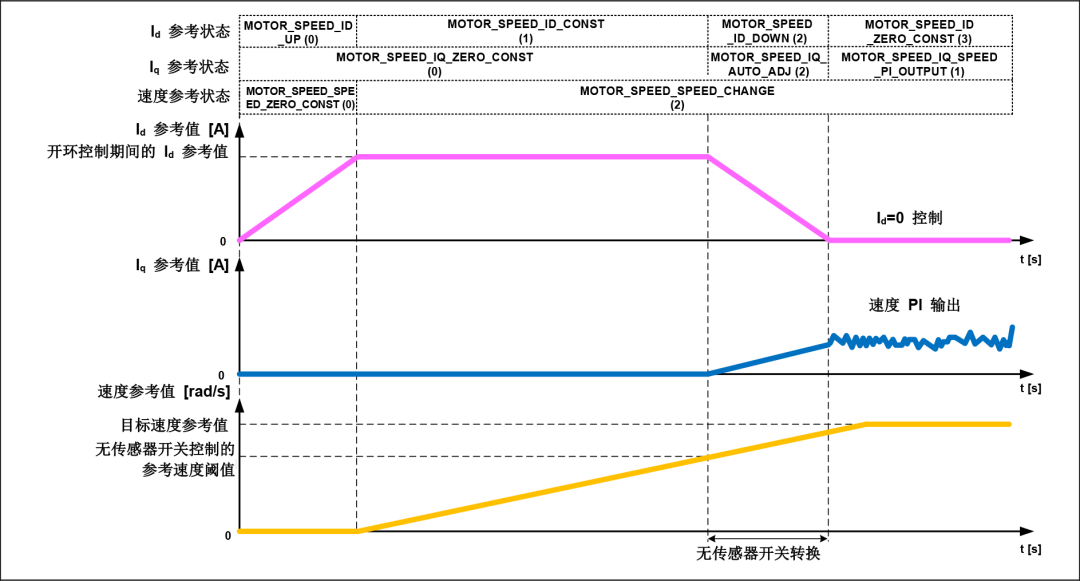
圖3-4無傳感器矢量控制軟件的啟動控制
3.1.6 系統(tǒng)保護(hù)功能
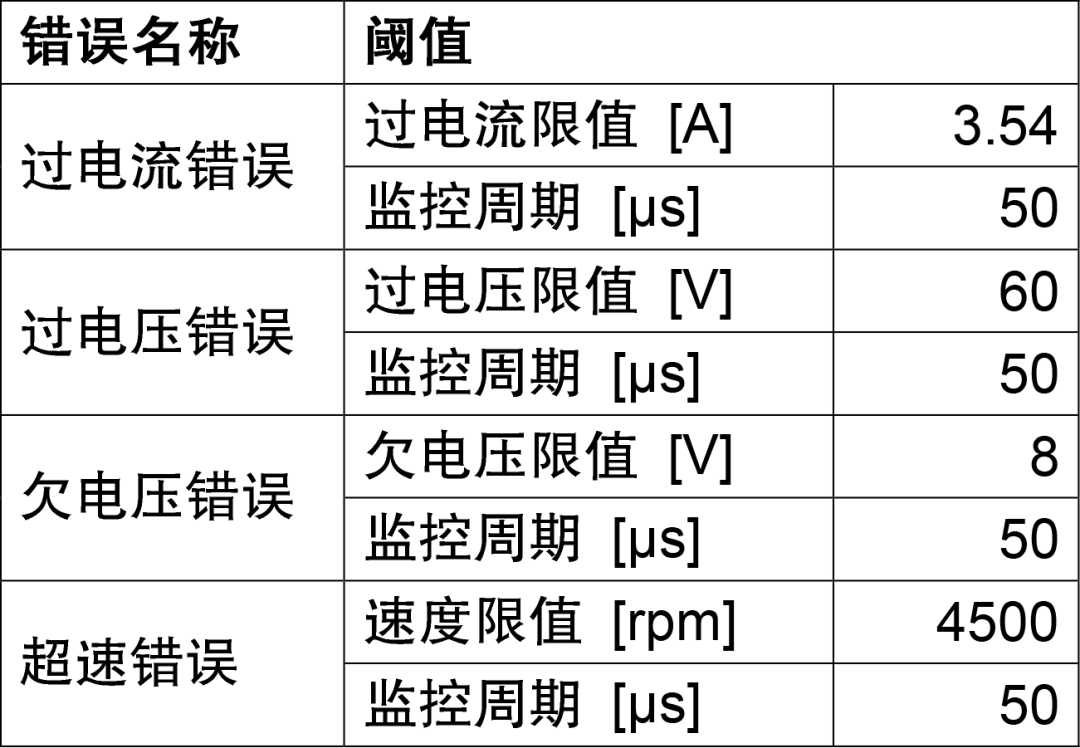
本控制軟件具有以下錯誤狀態(tài),發(fā)生相應(yīng)錯誤時執(zhí)行緊急停止功能。表3-5列出了系統(tǒng)保護(hù)功能的各個軟件閾值。
3
過電流錯誤
有兩種過電流保護(hù)。
硬件OCP:檢測到來自硬件的緊急停止信號時,PWM 輸出端口被自動設(shè)置為高阻抗輸出(無軟件干預(yù))。
軟件OCP:在過電流監(jiān)控周期內(nèi)對 U、V和W相電流進(jìn)行監(jiān)控。檢測到過電流時,CPU執(zhí)行緊急停止。
3
過電壓錯誤
在過電壓監(jiān)控周期內(nèi)對逆變器總線電壓進(jìn)行監(jiān)控。檢測到過電壓(電壓超出過電壓限值)時,CPU執(zhí)行緊急停止。這里的過電壓限值在設(shè)置時會將檢測電路電阻值的誤差考慮在內(nèi)。出現(xiàn)此誤差時,CPU在出錯的電機(jī)一端執(zhí)行緊急停止。
3
欠電壓錯誤
在欠電壓監(jiān)控周期內(nèi)對逆變器總線電壓進(jìn)行監(jiān)控。檢測到欠電壓(電壓低于限值)時,CPU執(zhí)行緊急停止。這里的欠電壓限值在設(shè)置時會將檢測電路電阻值的誤差考慮在內(nèi)。出現(xiàn)此誤差時,CPU在出錯的電機(jī)一端執(zhí)行緊急停止。
3
超速錯誤
在轉(zhuǎn)速監(jiān)控周期內(nèi)對轉(zhuǎn)速進(jìn)行監(jiān)控。當(dāng)速度超出限值時,CPU執(zhí)行緊急停止。出現(xiàn)此誤差時,CPU在出錯的電機(jī)一端執(zhí)行緊急停止。
表3-5 系統(tǒng)保護(hù)功能的設(shè)置值
未完待續(xù)_
-
mcu
+關(guān)注
關(guān)注
146文章
17838瀏覽量
360450 -
瑞薩
+關(guān)注
關(guān)注
36文章
22370瀏覽量
87734
原文標(biāo)題:RA6T2無傳感器矢量控制應(yīng)用筆記 [3] 控制程序描述 (1)
文章出處:【微信號:瑞薩MCU小百科,微信公眾號:瑞薩MCU小百科】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
改進(jìn)電壓模型的異步電機(jī)無速度傳感器矢量控制
ACS880基本控制程序(YINLX)固件手冊
一種基于矢量控制的無位置傳感器永磁同步電機(jī)調(diào)速系統(tǒng)的研究
帶速度傳感器矢量控制異步電動機(jī)閉環(huán)變頻調(diào)速系統(tǒng)有何特點(diǎn)?

帶速度傳感器矢量控制與閉環(huán)v/f控制的區(qū)別
基于瑞薩RA6T2 MCU實(shí)現(xiàn)過電流保護(hù)功能
U/f和矢量控制變頻 器有哪些優(yōu)缺點(diǎn)?矢量控制是如何使電動機(jī)具有大的轉(zhuǎn)矩的?應(yīng)用矢量控 制應(yīng)注意哪些事項(xiàng)?
ACS580標(biāo)準(zhǔn)控制程序固件手冊
空間電壓矢量控制模式是什么意思
空間電壓矢量控制模式和v/f有區(qū)別嗎
RA6T2的16位模數(shù)轉(zhuǎn)換器操作 [14] 驗(yàn)證應(yīng)用項(xiàng)目
![<b class='flag-5'>RA6T2</b>的16位模數(shù)轉(zhuǎn)換<b class='flag-5'>器</b>操作 [14] 驗(yàn)證應(yīng)用項(xiàng)目](https://file1.elecfans.com/web2/M00/BB/1B/wKgZomWXtb6ACk_NAAARMuEl9ZA261.png)
RA6T2的16位模數(shù)轉(zhuǎn)換器操作 [13] 運(yùn)行應(yīng)用項(xiàng)目
RA6T2的16位模數(shù)轉(zhuǎn)換器操作 [12] 應(yīng)用項(xiàng)目簡介





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論