") KUKA E6POS結(jié)構(gòu)類型的變量定義
KUKA E6POS結(jié)構(gòu)類型的變量定義
$POS_ACT
當(dāng)前笛卡爾機(jī)器人位置
E6POS結(jié)構(gòu)類型的變量定義了TCP相對(duì)于BASE坐標(biāo)系的設(shè)定點(diǎn)位置。
? X、Y、Z:原點(diǎn)沿軸的偏移,單位為[mm]
? A、B、C:軸角度的旋轉(zhuǎn)偏移,單位為[°]
變量是寫(xiě)保護(hù)的。在機(jī)器人程序中,變量觸發(fā)提前運(yùn)行停止。
$POS_ACT_MES
測(cè)量的笛卡爾機(jī)器人位置
E6POS結(jié)構(gòu)類型的變量定義了TCP相對(duì)于BASE坐標(biāo)系的實(shí)際位置。
? X、Y、Z:原點(diǎn)沿軸的偏移,單位為[mm]
? A、B、C:軸角度的旋轉(zhuǎn)偏移,單位為[°]
例子1:
piece_found = $POS_ACT_MES
機(jī)器人的當(dāng)前位置現(xiàn)在就是工件的位置。在此將其保存到一個(gè)變量中
例子2:
用該指令將工具逆著沖擊方向拉回 100 mm,這不取決于機(jī)器人現(xiàn)在位于哪個(gè)位置上
LIN $POS_ACT : {x -100, y 0, z 0, a 0, b 0, c 0}
前提是沖擊方向在 X 方向上。
$POS_ACT 是結(jié)構(gòu)類型 E6POS 的系統(tǒng)變量,含有當(dāng)前的笛卡爾機(jī)器人位置。
$POS_BACK,$POS_F OR–P2近似
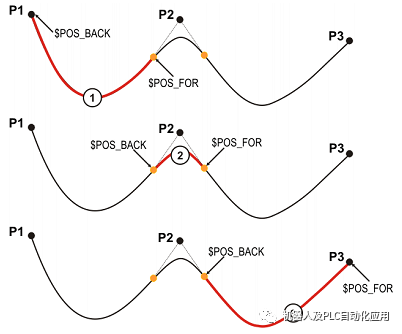
1單塊
2中間塊
3后續(xù)塊
$POS_BACK當(dāng)前運(yùn)動(dòng)塊的笛卡爾起始位置
E6POS結(jié)構(gòu)類型的變量定義了TCP相對(duì)于BASE坐標(biāo)系的起始位置。
? X、Y、Z:原點(diǎn)沿軸的偏移,單位為[mm]
? A、B、C:軸角度的旋轉(zhuǎn)偏移,單位為[°]
$POS_BACK可用于返回到中斷的動(dòng)作指令的起始位置$POS_BACK對(duì)應(yīng)于用于近似窗口內(nèi)的中斷的窗口的開(kāi)始,并且對(duì)應(yīng)于用于在近似窗口之后的中斷的窗的結(jié)束$POS_BACK觸發(fā)KRL程序中的提前運(yùn)行停止。
近似PTP運(yùn)動(dòng)
PTP P1
PTP P2 C_PTP
PTP P3
$POS_FOR 當(dāng)前運(yùn)動(dòng)塊的笛卡爾目標(biāo)位置
E6POS結(jié)構(gòu)類型的變量定義了TCP相對(duì)于BASE坐標(biāo)系的目標(biāo)位置。
? X、Y、Z:原點(diǎn)沿軸的偏移,單位為[mm]
? A、B、C:軸角度的旋轉(zhuǎn)偏移,單位為[°]
$POS_FOR可用于移動(dòng)到中斷的運(yùn)動(dòng)指令的目標(biāo)位置$POS_FOR對(duì)應(yīng)于近似窗口內(nèi)的中斷的窗口的結(jié)束,并且對(duì)應(yīng)于近似窗之前的中斷的窗的開(kāi)始$POS_FOR觸發(fā)KRL程序中的提前運(yùn)行停止。
$POS_INT發(fā)生中斷時(shí)的笛卡爾機(jī)器人位置
E6POS結(jié)構(gòu)類型的變量定義了中斷時(shí)TCP相對(duì)于BASE坐標(biāo)系的位置。
? X、Y、Z:原點(diǎn)沿軸的偏移,單位為[mm]
? A、B、C:軸角度的旋轉(zhuǎn)偏移,單位為[°]
$POS_INT可用于返回到觸發(fā)中斷的笛卡爾位置。該變量?jī)H在中斷程序中允許,并觸發(fā)提前運(yùn)行停止。
$POS_RET 離開(kāi)路徑時(shí)的笛卡爾機(jī)器人位置
E6POS結(jié)構(gòu)類型的變量定義了TCP在編程路徑離開(kāi)時(shí)相對(duì)于BASE坐標(biāo)系的位置。
? X、Y、Z:原點(diǎn)沿軸的偏移,單位為[mm]
? A、B、C:軸角度的旋轉(zhuǎn)偏移,單位為[°]
當(dāng)機(jī)器人靜止時(shí),可以使用$POS_RET返回到留下路徑的笛卡爾位置。
示例 :
在編程設(shè)定的軌跡上有兩個(gè)物品,其位置通過(guò)兩個(gè)連接在輸入端 6 和 7 上的傳感器識(shí)別。然后要接近這兩個(gè)已識(shí)別到的位置。
為此,將兩個(gè)已識(shí)別到的位置保存為點(diǎn) P_1 和 P_2。在主程序的第二個(gè)部分接近這些點(diǎn)。
如果機(jī)器人控制系統(tǒng)識(shí)別到用 INTERRUPT … DECL … WHEN … DO … 定義的事件,則始終在系統(tǒng)變量 $AXIS_INT (與軸相關(guān))和 $POS_INT (笛卡爾)中保存當(dāng)前的機(jī)器人位置。
主程序:
局部中斷程序 1:
DEF PROG()
...
INTERRUPT DECL 10 WHEN $IN[6]==TRUE DO UP1()
INTERRUPT DECL 20 WHEN $IN[7]==TRUE DO UP2()
...
INTERRUPT ON
LIN START
LIN END
INTERRUPT OFF
LIN P_1
LIN P_2
...
END
局部中斷程序 2:
DEF UP1()
P_1=$POS_INT
END
DEF UP2()
P_2=$POS_INT
END
示例 2
在碰撞識(shí)別時(shí)要求快速和可靠地停止機(jī)器人。為此,用 BRAKE F 聲明中斷。
如果超出軸 A1 上的正轉(zhuǎn)矩 1500 Nm,則中斷立即開(kāi)始 BRAKE F 并調(diào)用子程序STOP_FAST()。如果機(jī)器人停止,則沿工具方向 X 移動(dòng) -10 mm 返回至笛卡爾位置 $POS_INT。$POS_INT 是觸發(fā)了中斷的位置。
DEF PROG()
...
INTERRUPT WITH BRAKE F DECL 25 WHEN $TORQUE_AXIS_ACT[1]>1500 DO
STOP_FAST()
INTERRUPT ON 25
...
END
...
DEF STOP_FAST()
BRAKE F
PTP $POS_INT:{x -10}
...
END
示例 3
按照硬件,在涂膠期間進(jìn)行不沿軌跡的緊急停止。通過(guò)程序停止涂膠并在許用(通過(guò)輸入端 10)之后將涂膠槍反向定位到軌跡上。
DEF PROG()
...
INTERRUPT DECL 1 WHEN $STOPMESS DO STOP_PROG()
LIN P_1
INTERRUPT ON
LIN P_2
INTERRUPT OFF
...
END
DEF STOP_PROG()
BRAKE F
GLUE=FALSE
WAIT FOR $IN[10]
LIN $POS_RET
GLUE=TRUE
END
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29463瀏覽量
211429 -
TCP
+關(guān)注
關(guān)注
8文章
1397瀏覽量
80339 -
KUKA
+關(guān)注
關(guān)注
3文章
218瀏覽量
16881
原文標(biāo)題:KUKA軌跡位置系統(tǒng)變量之$POS系列變量V13.17
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
變量的聲明和定義有什么區(qū)別和聯(lián)系
結(jié)構(gòu)體類型定義的一般格式
結(jié)構(gòu)體變量的定義與使用變量訪問(wèn)結(jié)構(gòu)體成員
Python私有變量的定義方法
51單片機(jī)實(shí)戰(zhàn)教程之C語(yǔ)言基礎(chǔ)(四 C語(yǔ)言變量定義)

STRUC:定義結(jié)構(gòu)類型
STRUCT和UDT類型變量是什么意思
SCL:STRUCT和UDT類型變量的賦值
C語(yǔ)言如何定義結(jié)構(gòu)體類型變量
KUKA變成STRUC:定義結(jié)構(gòu)類型
KUKA變成STRUC:定義結(jié)構(gòu)類型升級(jí)版
KUKA軌跡位置系統(tǒng)變量$POS_BACK,$POS_FOR,$POS_INT和$POS_RET

結(jié)構(gòu)體成員變量的引用方法123
使用結(jié)構(gòu)化的PLC變量的工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論